
手把手教你使用OpenVINO部署NanoDet模型
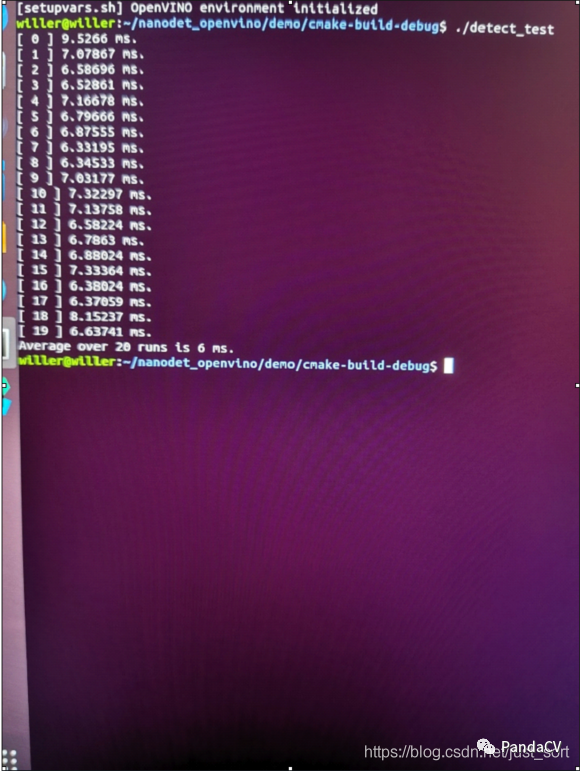
【GiantPandaCV】本文为大家介绍了一个手把手使用OpenVINO部署NanoDet的教程,并开源部署的全部代码,在Intel i7-7700HQ CPU做到了6ms一帧的速度。
0x0. nanodet简介
NanoDet (https://github.com/RangiLyu/nanodet)是一个速度超快和轻量级的Anchor-free 目标检测模型。想了解算法本身的可以去搜一搜之前机器之心的介绍。
0x1. 环境配置
Ubuntu:18.04
OpenVINO:2020.4
OpenCV:3.4.2
OpenVINO和OpenCV安装包(编译好了,也可以自己从官网下载自己编译)可以从链接: https://pan.baidu.com/s/1zxtPKm-Q48Is5mzKbjGHeg 密码: gw5c下载
OpenVINO安装
tar -xvzf l_openvino_toolkit_p_2020.4.287.tgz
cd l_openvino_toolkit_p_2020.4.287
sudo ./install_GUI.sh 一路next安装
cd /opt/intel/openvino/install_dependencies
sudo ./install_openvino_dependencies.sh
vi ~/.bashrc
把如下两行放置到bashrc文件尾
source /opt/intel/openvino/bin/setupvars.sh
source /opt/intel/openvino/opencv/setupvars.sh
source ~/.bashrc 激活环境
模型优化配置步骤
cd /opt/intel/openvino/deployment_tools/model_optimizer/install_prerequisites
sudo ./install_prerequisites_onnx.sh(模型是从onnx转为IR文件,只需配置onnx依赖)
OpenCV配置
tar -xvzf opencv-3.4.2.zip 解压OpenCV到用户根目录即可,以便后续调用。(这是我编译好的版本,有需要可以自己编译)
0x2. NanoDet模型训练和转换ONNX
git clone https://github.com/Wulingtian/nanodet.git
cd nanodet
cd config 配置模型文件,训练模型
定位到nanodet目录,进入tools目录,打开export.py文件,配置cfg_path model_path out_path三个参数
定位到nanodet目录,运行 python tools/export.py 得到转换后的onnx模型
python /opt/intel/openvino/deployment_tools/model_optimizer/mo_onnx.py --input_model onnx模型 --output_dir 期望模型输出的路径。得到IR文件
0x3. NanoDet模型部署
sudo apt install cmake 安装cmake
git clone https://github.com/Wulingtian/nanodet_openvino.git (求star!)
cd nanodet_openvino 打开CMakeLists.txt文件,修改OpenCV_INCLUDE_DIRS和OpenCV_LIBS_DIR,之前已经把OpenCV解压到根目录了,所以按照你自己的路径指定
定位到nanodet_openvino,cd models 把之前生成的IR模型(包括bin和xml文件)文件放到该目录下
定位到nanodet_openvino, cd test_imgs 把需要测试的图片放到该目录下
定位到nanodet_openvino,编辑main.cpp,xml_path参数修改为"../models/你的模型名称.xml"
编辑 num_class 设置类别数,例如:我训练的模型是安全帽检测,只有1类,那么设置为1
编辑 src 设置测试图片路径,src参数修改为"../test_imgs/你的测试图片"
定位到nanodet_openvino
mkdir build; cd build; cmake .. ;make
./detect_test 输出平均推理时间,以及保存预测图片到当前目录下,至此,部署完成!
0x4. 核心代码一览
//主要对图片进行预处理,包括resize和归一化
std::vector<float> Detector::prepareImage(cv::Mat &src_img){
std::vector<float> result(INPUT_W * INPUT_H * 3);
float *data = result.data();
float ratio = float(INPUT_W) / float(src_img.cols) < float(INPUT_H) / float(src_img.rows) ? float(INPUT_W) / float(src_img.cols) : float(INPUT_H) / float(src_img.rows);
cv::Mat flt_img = cv::Mat::zeros(cv::Size(INPUT_W, INPUT_H), CV_8UC3);
cv::Mat rsz_img = cv::Mat::zeros(cv::Size(src_img.cols*ratio, src_img.rows*ratio), CV_8UC3);
cv::resize(src_img, rsz_img, cv::Size(), ratio, ratio);
rsz_img.copyTo(flt_img(cv::Rect(0, 0, rsz_img.cols, rsz_img.rows)));
flt_img.convertTo(flt_img, CV_32FC3);
int channelLength = INPUT_W * INPUT_H;
std::vector split_img = {
cv::Mat(INPUT_W, INPUT_H, CV_32FC1, data + channelLength * 2),
cv::Mat(INPUT_W, INPUT_H, CV_32FC1, data + channelLength),
cv::Mat(INPUT_W, INPUT_H, CV_32FC1, data)
};
cv::split(flt_img, split_img);
for (int i = 0; i < 3; i++) {
split_img[i] = (split_img[i] - img_mean[i]) / img_std[i];
}
return result;
}
//加载IR模型,初始化网络
bool Detector::init(string xml_path,double cof_threshold,double nms_area_threshold,int input_w, int input_h, int num_class, int r_rows, int r_cols, std::vector<int> s, std::vector<float> i_mean,std::vector<float> i_std){
_xml_path = xml_path;
_cof_threshold = cof_threshold;
_nms_area_threshold = nms_area_threshold;
INPUT_W = input_w;
INPUT_H = input_h;
NUM_CLASS = num_class;
refer_rows = r_rows;
refer_cols = r_cols;
strides = s;
img_mean = i_mean;
img_std = i_std;
Core ie;
auto cnnNetwork = ie.ReadNetwork(_xml_path);
InputsDataMap inputInfo(cnnNetwork.getInputsInfo());
InputInfo::Ptr& input = inputInfo.begin()->second;
_input_name = inputInfo.begin()->first;
input->setPrecision(Precision::FP32);
input->getInputData()->setLayout(Layout::NCHW);
ICNNNetwork::InputShapes inputShapes = cnnNetwork.getInputShapes();
SizeVector& inSizeVector = inputShapes.begin()->second;
cnnNetwork.reshape(inputShapes);
_outputinfo = OutputsDataMap(cnnNetwork.getOutputsInfo());
for (auto &output : _outputinfo) {
output.second->setPrecision(Precision::FP32);
}
_network = ie.LoadNetwork(cnnNetwork, "CPU");
return true;
}
//模型推理及获取输出结果
vector Detector::process_frame(Mat& inframe) {
cv::Mat showImage = inframe.clone();
std::vector<float> pr_img = prepareImage(inframe);
InferRequest::Ptr infer_request = _network.CreateInferRequestPtr();
Blob::Ptr frameBlob = infer_request->GetBlob(_input_name);
InferenceEngine::LockedMemory<void> blobMapped = InferenceEngine::as(frameBlob)->wmap();
float* blob_data = blobMapped.as<float*>();
memcpy(blob_data, pr_img.data(), 3 * INPUT_H * INPUT_W * sizeof(float));
infer_request->Infer();
vector origin_rect;
vector<float> origin_rect_cof;
int i=0;
vector bboxes;
for (auto &output : _outputinfo) {
auto output_name = output.first;
Blob::Ptr blob = infer_request->GetBlob(output_name);
LockedMemory<const void> blobMapped = as(blob)->rmap();
float *output_blob = blobMapped.as<float *>();
bboxes = postProcess(showImage,output_blob);
++i;
}
return bboxes;
}
//对模型输出结果进行解码及nms
std::vector Detector::postProcess(const cv::Mat &src_img,
float *output) {
GenerateReferMatrix();
std::vector result;
float *out = output;
float ratio = std::max(float(src_img.cols) / float(INPUT_W), float(src_img.rows) / float(INPUT_H));
cv::Mat result_matrix = cv::Mat(refer_rows, NUM_CLASS + 4, CV_32FC1, out);
for (int row_num = 0; row_num < refer_rows; row_num++) {
Detector::Bbox box;
auto *row = result_matrix.ptr<float>(row_num);
auto max_pos = std::max_element(row + 4, row + NUM_CLASS + 4);
box.prob = row[max_pos - row];
if (box.prob < _cof_threshold)
continue;
box.classes = max_pos - row - 4;
auto *anchor = refer_matrix.ptr<float>(row_num);
box.x = (anchor[0] - row[0] * anchor[2] + anchor[0] + row[2] * anchor[2]) / 2 * ratio;
box.y = (anchor[1] - row[1] * anchor[2] + anchor[1] + row[3] * anchor[2]) / 2 * ratio;
box.w = (row[2] + row[0]) * anchor[2] * ratio;
box.h = (row[3] + row[1]) * anchor[2] * ratio;
result.push_back(box);
}
NmsDetect(result);
return result;
}//主要对图片进行预处理,包括resize和归一化
std::vector<float> Detector::prepareImage(cv::Mat &src_img){
std::vector<float> result(INPUT_W * INPUT_H * 3);
float *data = result.data();
float ratio = float(INPUT_W) / float(src_img.cols) < float(INPUT_H) / float(src_img.rows) ? float(INPUT_W) / float(src_img.cols) : float(INPUT_H) / float(src_img.rows);
cv::Mat flt_img = cv::Mat::zeros(cv::Size(INPUT_W, INPUT_H), CV_8UC3);
cv::Mat rsz_img = cv::Mat::zeros(cv::Size(src_img.cols*ratio, src_img.rows*ratio), CV_8UC3);
cv::resize(src_img, rsz_img, cv::Size(), ratio, ratio);
rsz_img.copyTo(flt_img(cv::Rect(0, 0, rsz_img.cols, rsz_img.rows)));
flt_img.convertTo(flt_img, CV_32FC3);
int channelLength = INPUT_W * INPUT_H;
std::vector split_img = {
cv::Mat(INPUT_W, INPUT_H, CV_32FC1, data + channelLength * 2),
cv::Mat(INPUT_W, INPUT_H, CV_32FC1, data + channelLength),
cv::Mat(INPUT_W, INPUT_H, CV_32FC1, data)
};
cv::split(flt_img, split_img);
for (int i = 0; i < 3; i++) {
split_img[i] = (split_img[i] - img_mean[i]) / img_std[i];
}
return result;
}
//加载IR模型,初始化网络
bool Detector::init(string xml_path,double cof_threshold,double nms_area_threshold,int input_w, int input_h, int num_class, int r_rows, int r_cols, std::vector<int> s, std::vector<float> i_mean,std::vector<float> i_std){
_xml_path = xml_path;
_cof_threshold = cof_threshold;
_nms_area_threshold = nms_area_threshold;
INPUT_W = input_w;
INPUT_H = input_h;
NUM_CLASS = num_class;
refer_rows = r_rows;
refer_cols = r_cols;
strides = s;
img_mean = i_mean;
img_std = i_std;
Core ie;
auto cnnNetwork = ie.ReadNetwork(_xml_path);
InputsDataMap inputInfo(cnnNetwork.getInputsInfo());
InputInfo::Ptr& input = inputInfo.begin()->second;
_input_name = inputInfo.begin()->first;
input->setPrecision(Precision::FP32);
input->getInputData()->setLayout(Layout::NCHW);
ICNNNetwork::InputShapes inputShapes = cnnNetwork.getInputShapes();
SizeVector& inSizeVector = inputShapes.begin()->second;
cnnNetwork.reshape(inputShapes);
_outputinfo = OutputsDataMap(cnnNetwork.getOutputsInfo());
for (auto &output : _outputinfo) {
output.second->setPrecision(Precision::FP32);
}
_network = ie.LoadNetwork(cnnNetwork, "CPU");
return true;
}
//模型推理及获取输出结果
vector Detector::process_frame(Mat& inframe) {
cv::Mat showImage = inframe.clone();
std::vector<float> pr_img = prepareImage(inframe);
InferRequest::Ptr infer_request = _network.CreateInferRequestPtr();
Blob::Ptr frameBlob = infer_request->GetBlob(_input_name);
InferenceEngine::LockedMemory<void> blobMapped = InferenceEngine::as(frameBlob)->wmap();
float* blob_data = blobMapped.as<float*>();
memcpy(blob_data, pr_img.data(), 3 * INPUT_H * INPUT_W * sizeof(float));
infer_request->Infer();
vector origin_rect;
vector<float> origin_rect_cof;
int i=0;
vector bboxes;
for (auto &output : _outputinfo) {
auto output_name = output.first;
Blob::Ptr blob = infer_request->GetBlob(output_name);
LockedMemory<const void> blobMapped = as(blob)->rmap();
float *output_blob = blobMapped.as<float *>();
bboxes = postProcess(showImage,output_blob);
++i;
}
return bboxes;
}
//对模型输出结果进行解码及nms
std::vector Detector::postProcess(const cv::Mat &src_img,
float *output) {
GenerateReferMatrix();
std::vector result;
float *out = output;
float ratio = std::max(float(src_img.cols) / float(INPUT_W), float(src_img.rows) / float(INPUT_H));
cv::Mat result_matrix = cv::Mat(refer_rows, NUM_CLASS + 4, CV_32FC1, out);
for (int row_num = 0; row_num < refer_rows; row_num++) {
Detector::Bbox box;
auto *row = result_matrix.ptr<float>(row_num);
auto max_pos = std::max_element(row + 4, row + NUM_CLASS + 4);
box.prob = row[max_pos - row];
if (box.prob < _cof_threshold)
continue;
box.classes = max_pos - row - 4;
auto *anchor = refer_matrix.ptr<float>(row_num);
box.x = (anchor[0] - row[0] * anchor[2] + anchor[0] + row[2] * anchor[2]) / 2 * ratio;
box.y = (anchor[1] - row[1] * anchor[2] + anchor[1] + row[3] * anchor[2]) / 2 * ratio;
box.w = (row[2] + row[0]) * anchor[2] * ratio;
box.h = (row[3] + row[1]) * anchor[2] * ratio;
result.push_back(box);
}
NmsDetect(result);
return result;
}
0x5. 推理时间展示及预测结果展示

至此完成了NanoDet在X86 CPU上的部署,希望有帮助到大家。
欢迎关注GiantPandaCV/PandaCV, 在这里你将看到独家的深度学习分享,坚持原创,每天分享我们学习到的新鲜知识。( • ̀ω•́ )✧
有对文章相关的问题,或者想要加入交流群,欢迎添加BBuf微信:
为了方便读者获取资料以及我们公众号的作者发布一些Github工程的更新,我们成立了一个QQ群,二维码如下,感兴趣可以加入。