
开源了!机器人技术常用的路径规划算法(含动画演示)
【导语】:一个实现了机器人技术中常用的路径规划算法的开源库,还有动图直观演示运行过程。该库公开时间不长,在 GitHub 已有 1200+ Star。
简介
在机器人研究领域,给定某一特定任务之后,如何规划机器人的运动方式至关重要。PathPlanning 是使用 Python 实现的存储库,实现了机器人技术中常用的路径规划算法。开发者还为每个算法设计了动画来演示运行过程,相当直观清晰。
项目地址:
https://github.com/zhm-real/PathPlanning
这个项目的贡献者目前是 4 位国内开发者。
目录结构
PathPlanning 库实现的路径规划算法包括基于搜索和基于采样的规划算法,目录结构如下:
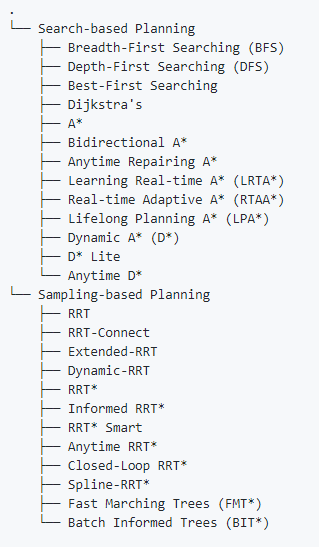
下面我们直接通过开发者设计的动图了解各个算法的运行过程:
基于搜索的路径规划算法
(1)最佳路径优先搜索算法
"""
Best-First Searching
@author: huiming zhou
"""
import os
import sys
import math
import heapq
sys.path.append(os.path.dirname(os.path.abspath(__file__)) +
"/../../Search_based_Planning/")
from Search_2D import plotting, env
from Search_2D.Astar import AStar
class BestFirst(AStar):
"""BestFirst set the heuristics as the priority
"""
def searching(self):
"""
Breadth-first Searching.
:return: path, visited order
"""
self.PARENT[self.s_start] = self.s_start
self.g[self.s_start] = 0
self.g[self.s_goal] = math.inf
heapq.heappush(self.OPEN,
(self.heuristic(self.s_start), self.s_start))
while self.OPEN:
_, s = heapq.heappop(self.OPEN)
self.CLOSED.append(s)
if s == self.s_goal:
break
for s_n in self.get_neighbor(s):
new_cost = self.g[s] + self.cost(s, s_n)
if s_n not in self.g:
self.g[s_n] = math.inf
if new_cost < self.g[s_n]: # conditions for updating Cost
self.g[s_n] = new_cost
self.PARENT[s_n] = s
# best first set the heuristics as the priority
heapq.heappush(self.OPEN, (self.heuristic(s_n), s_n))
return self.extract_path(self.PARENT), self.CLOSED
def main():
s_start = (5, 5)
s_goal = (45, 25)
BF = BestFirst(s_start, s_goal, 'euclidean')
plot = plotting.Plotting(s_start, s_goal)
path, visited = BF.searching()
plot.animation(path, visited, "Best-first Searching") # animation
if __name__ == '__main__':
main()
(2)Dijkstra搜索算法
(3)A*搜索算法
(4)双向A* 搜索算法
(5)重复 A*搜索算法
(6)ARA* 搜索算法
(7)LRTA* 搜索算法
(8)RTAA* 搜索算法
(9)D* 搜索算法
(10)终身规划 A* 搜索算法
(11)Anytime D* 搜索算法:变动较小
(12)Anytime D* 搜索算法:变动较大
基于采样的路径规划算法
(1)RRT 算法
(2)目标偏好 RRT 算法
(3)RRT_CONNECT 算法
(4)Extended_RRT 算法
(5)动态 RRT 算法
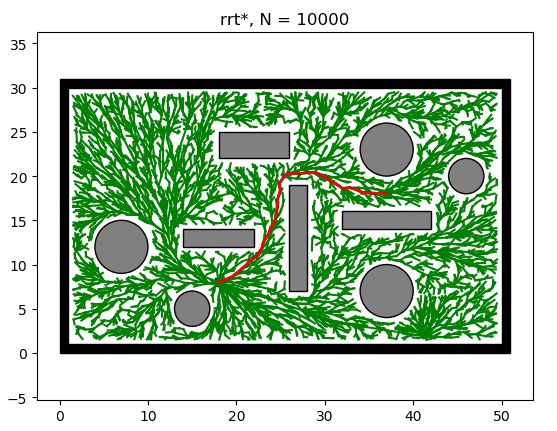
(6)N = 10000 时,rrt * 算法
(7)N = 1000 时,rrt*-Smart 算法
(8)FMT* 算法
(9)N =1000 时,Informed rrt * 算法
(10)BIT* 算法
以上是开发者设计的动画,是不是很直观生动呢?对路径规划算法感兴趣的童鞋可以到项目主页详细了解。
- EOF -
更多优秀开源项目(点击下方图片可跳转)
如果觉得本文介绍的开源项目不错,欢迎转发推荐给更多人。
分享、点赞和在看
支持我们分享更多优秀开源项目,谢谢!