
CNN结构设计技巧-兼顾速度精度与工程实现
极市导读
本文总结了CNN在分割、检测、low-level、metric learning等领域的应用方法和设计技巧。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
目录:
总纲
分割篇
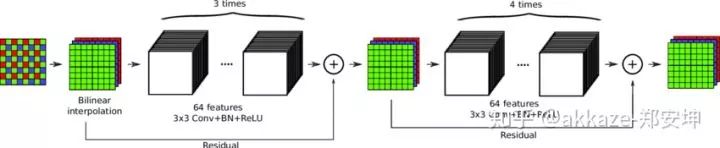
low-level篇
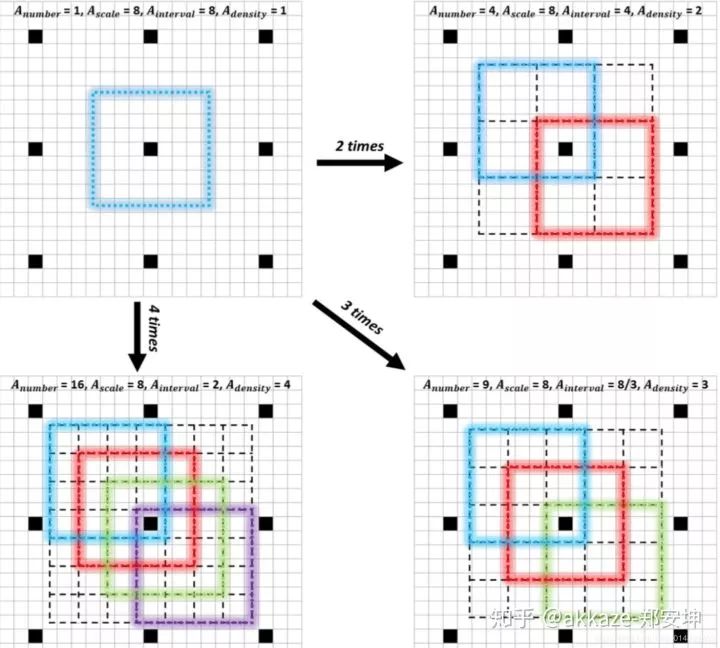
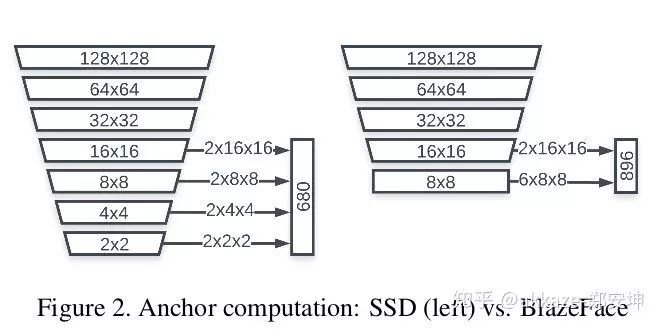
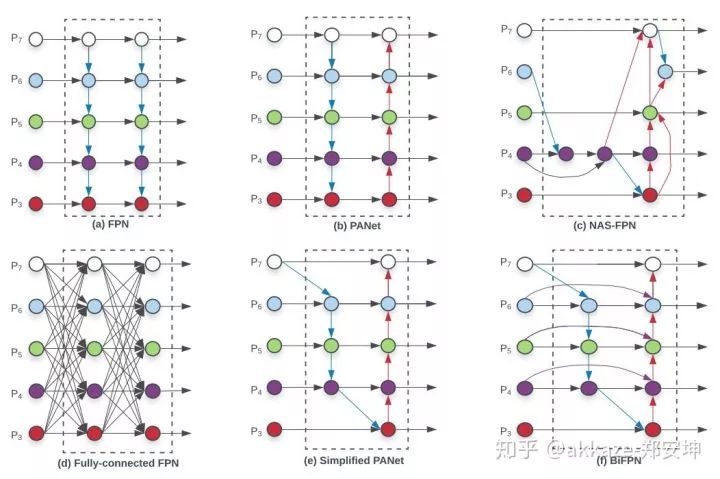
检测篇
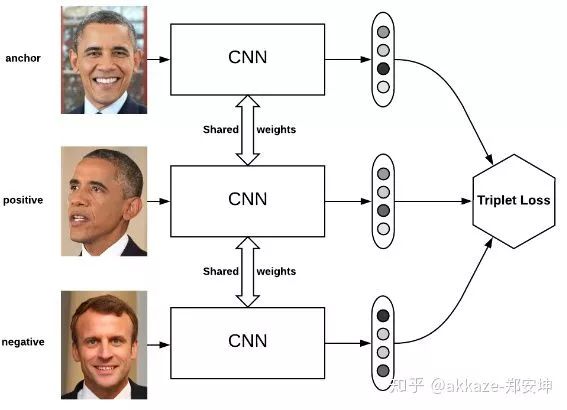
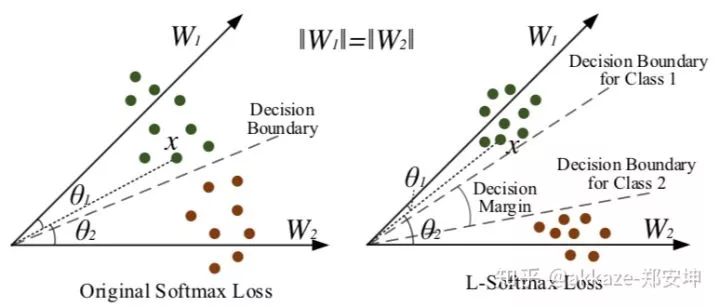
metric learning篇
分类篇
landmark篇
视频理解篇
双目篇
3D篇
数据增强篇
总纲

分割篇
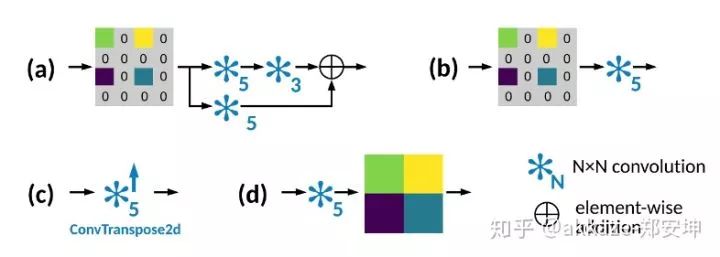
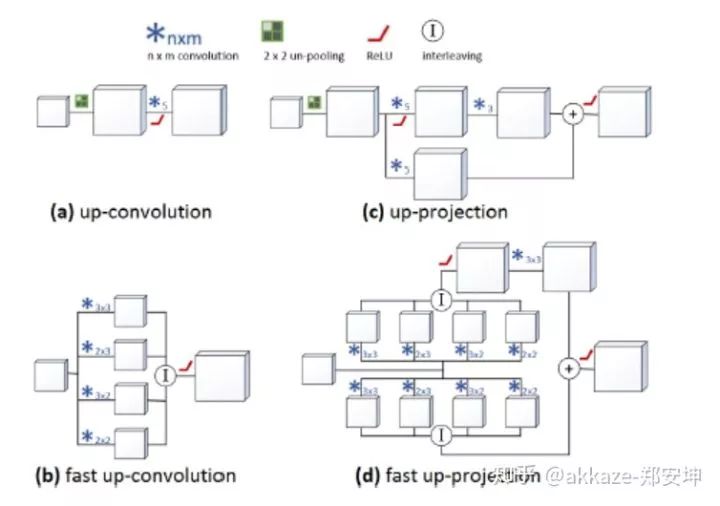
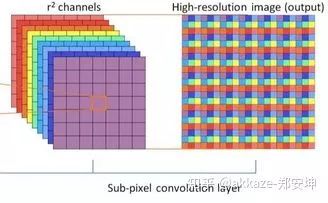
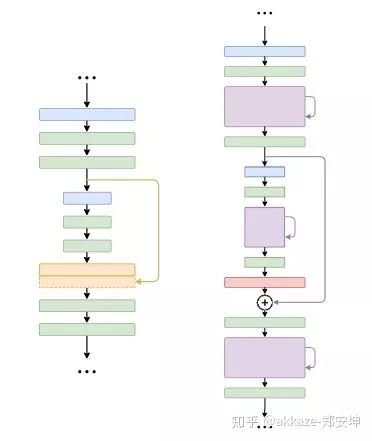
low-level篇
检测篇

metric learning篇
分类篇
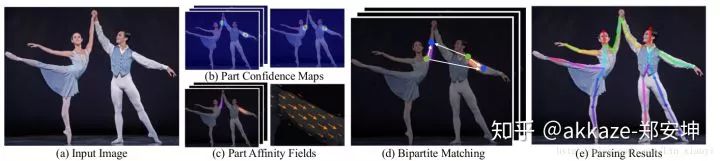
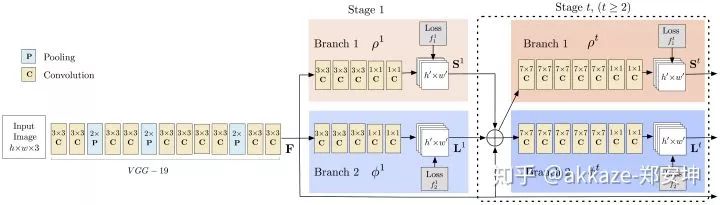
landmark篇
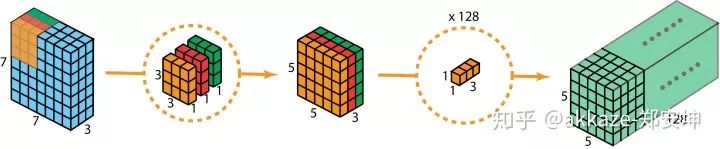
以下内容涉及3d卷积:
这就是3d卷积,可以看到和2d卷积没有本质差异,只是输入输出都变成了3d
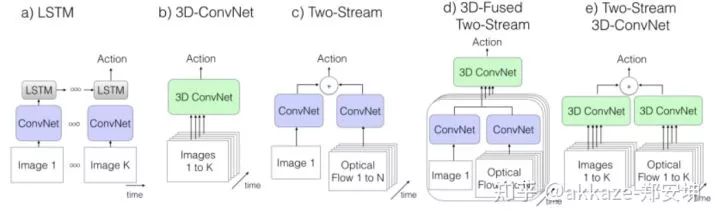
视频理解篇
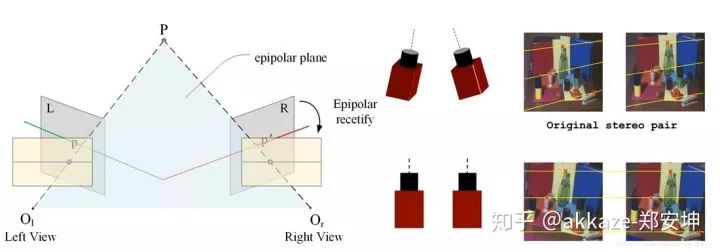
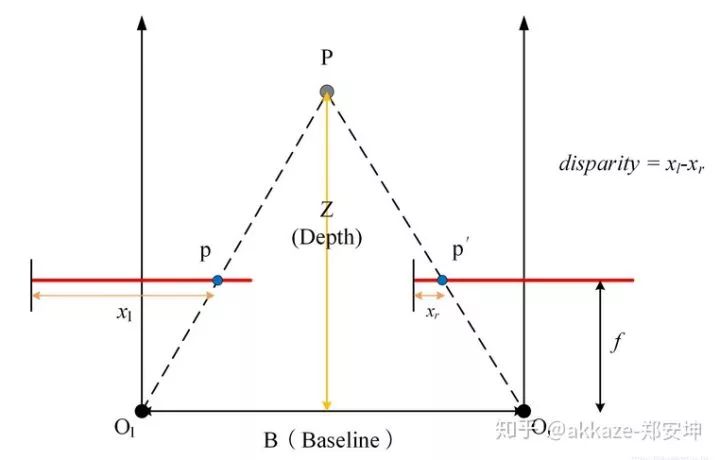
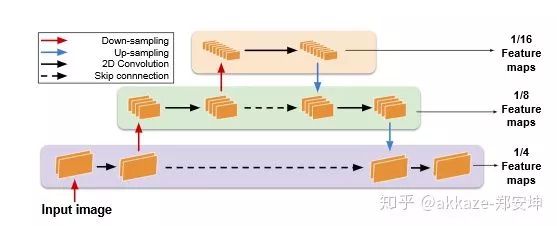
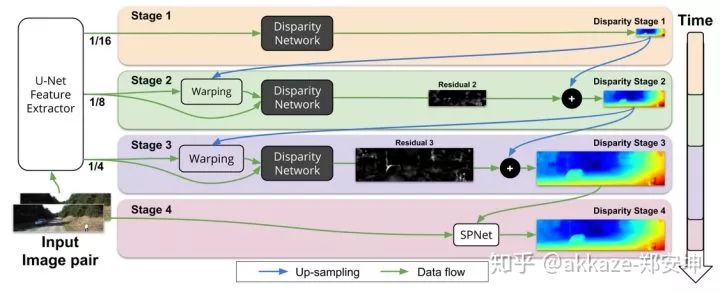
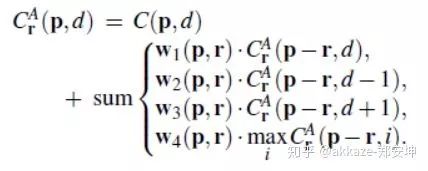
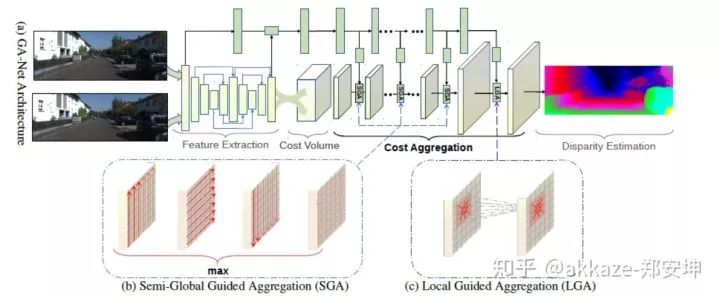
双目篇(立体匹配)


3D篇
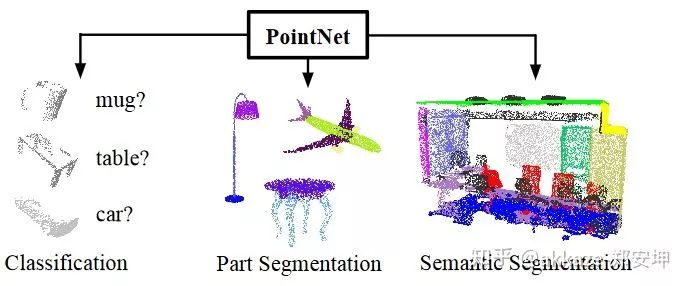
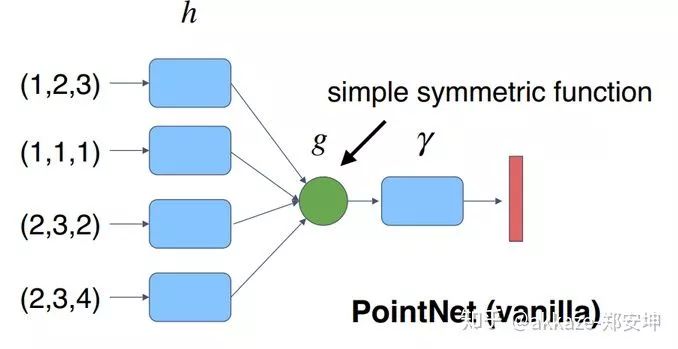
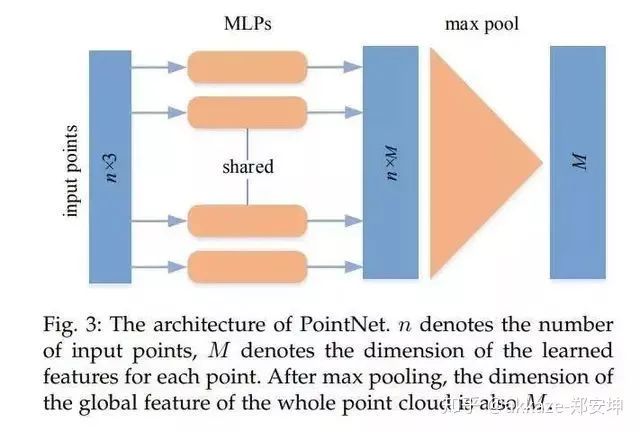
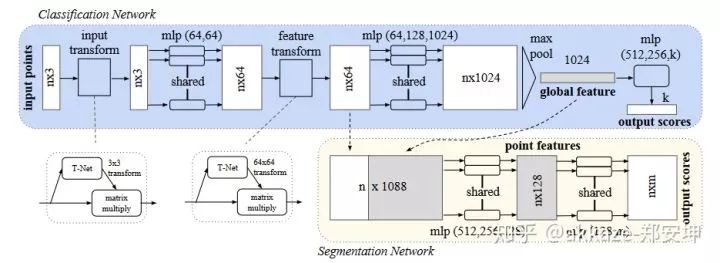
无序性:点云本质上是一长串点(nx3矩阵,其中n是点数)。在几何上,点的顺序不影响它在空间中对整体形状的表示,例如,相同的点云可以由两个完全不同的矩阵表示。
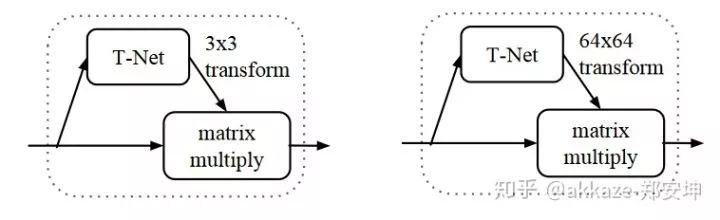
相同的点云在空间中经过一定的刚性变化(旋转或平移),坐标发生变化,我们希望不论点云在怎样的坐标系下呈现,网络都能得到相同的结果。



数据增强篇
公众号后台回复“画图模版”获取机器学习画图模版资源~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
评论