
对低轨导航系统发展趋势的思考
作者:袁 洪1,陈 潇1,2,罗瑞丹1,万红霞1,张 扬1,2,李 冉1,杨 光1(1.中国科学院空天信息创新研究院,2.中国科学院大学电子电气与通信工程学院)


我国北斗三号卫星导航系统已于2020年完成建设,同时欧盟Galileo系统预计将在2022年完成系统建设,届时全球将有包含美国全球定位系统(Global Positioning System,GPS)、俄罗斯全球卫星导航系统(GLObal NAvigation Satellite System,GLONASS)、中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)和欧盟Galileo系统等共计100余颗导航卫星在轨运行,卫星导航应用将迎来新的历史篇章[1-2]。但是随着四大卫星导航系统广泛应用,现有全球导航卫星系统(Global Navigation Satellite System,GNSS)的不足也逐渐凸显,一是在全球实时厘米级高精度定位方面,现有应用的GNSS精密单点定位(Precise Point Positioning,PPP)系统收敛时间较长;二是GNSS导航信号落地功率低,容易受到干扰,恶劣电磁环境下应用受限;三是目前对我国来讲,尚无法全球建站,难以实现北斗信号的全球监测[3]。
针对现有GNSS存在的不足,在进一步提升卫星导航性能的技术途径方面,低轨导航是潜在的手段之一[4]。对比中高轨GNSS卫星,低轨(Low Earth Orbit,LEO)卫星轨道高度较低,要保障全球覆盖所需的卫星数量将是现有GPS卫星数量的9倍[5]。建立和运营如此大规模的星座,在商业航天到来之前,所需的成本太高。伴随着近十年商业航天的快速发展,如SpaceX、OneWeb为代表的商业航天公司的巨型低轨通信星座等,一方面有利于卫星成本持续下降,单颗GPS卫星的制造和发射成本(5亿美元)相当于数百颗低轨卫星成本(100万美元/颗)[6];另一方面,也使得以较低成本发展全球低轨导航系统成为可能。
从卫星导航发展历程来看,最早的卫星导航系统采用低轨卫星星座——美国子午仪卫星导航系统[7],其后以美国GPS为代表,后续卫星导航系统都采用了中高轨道卫星星座。如今低轨导航重新成为热点,主要原因在于其与中高轨卫星导航相比,具有更低的空间传播衰减,便于提升导航抗干扰能力;具有对中高轨GNSS信号的监测便利,从而可提升中高轨GNSS的性能;具有更快速几何变化特性,能够提升高精度定位的收敛时间[8-10]。
本文从剖析不同历史阶段低轨导航的应用方向和技术体制入手,总结基于低轨卫星和低轨与中高轨卫星组合解决抗干扰和高精度定位需求的技术潜力,对下一步低轨导航在整个卫星导航系统体系中的应用前景和技术挑战进行分析,对未来低轨导航系统建设提供建议。
1.1 低轨导航发展历程
最早的卫星导航系统采用了低轨星座,即美国的子午仪卫星导航系统(Transit Navigation System),其目的是向美军核动力弹道导弹潜艇提供导航服务,校正惯性导航误差,每天校正若干次,校正精度0.1n mile,以解决地基导航未覆盖区域的无发散导航定位问题。该系统于1964年建成,由5~10颗轨道高度为1100km的圆形极轨卫星组成,其星座构型呈鸟笼(Bird Cage)状[7]。系统采用用户静默接收多普勒测量定位原理,定位时间需要10~15min,定位精度一般为20~50m[11-12]。1967年,苏联也部署了类似的军用导航通信系统Parus/Tsikada,也称为“蝉”[9,13]。美国和苏联建设的低轨导航系统体现了冷战期间海基战略武器对全球覆盖导航定位的刚性需求。1996年底,随着GPS提供服务,子午仪卫星导航系统停止服务。
在20世纪末,出现了以铱星(Iridium)为代表的低轨移动通信星座,该星座由66颗低轨卫星组成,均匀分布在6个近圆极轨道,每个轨道11颗卫星。2016年5月,铱星开展了卫星时间和定位服务(Satellite Time and Location,STL)试验,其目的是为关键基础设施(金融、电力以及网络)和军用用户提供GPS备份定位授时服务,但未见到形成整星座服务能力的确切报道。STL的定位精度能够达到20m,授时精度能够达到1μs[14-17]。铱星用于导航的技术优势主要有:一是相对于GNSS信号,具有更强的信号落地功率,能够在高衰减条件(室内深处)以及一定恶意干扰条件下提供定位授时服务;二是铱星采用48个点波束,将点波束和随机广播相结合形成了基于位置认证的服务机制,能够抵抗欺骗干扰[15]。
近些年来,以SpaceX、OneWeb、Samsung等为代表的巨型低轨通信星座蓬勃发展,其初衷是从太空提供全球范围内无缝稳定的宽带互联网通信服务。巨型低轨星座发展也大大降低了低轨卫星的制造与运营成本,利用低轨卫星提供导航服务成为目前的讨论热点[14-15,18]。
从导航定位角度来看,巨型星座可带来更多导航信号源,采用通信星座播发导航信号或者直接利用通信信号进行导航,能够增强现有中高轨卫星导航系统的性能,也能够作为现有卫星导航的备份[19-21]。2021年,美国加州大学开展了基于Starlink卫星的Ku频段信号定位试验,采用多普勒定位方式,静态用户的三维定位精度达到22.9m,二维定位精度达到10m[21]。国内鸿雁、天象也均基于通信星座开展导航增强试验验证[22-23]。表1所示为目前主要低轨通信星座情况。
表1 主要低轨通信星座情况
Tab.1 Main LEO communication constellations

除了低轨通信星座以外,国内外均开展了面向专用低轨导航星座建设的研究与试验。专用低轨导航星座发射与现有GNSS类似的导航信号,旨在独立导航或增强现有卫星导航系统服务能力,例如高精度定位服务、功率增强以及天基监视等。
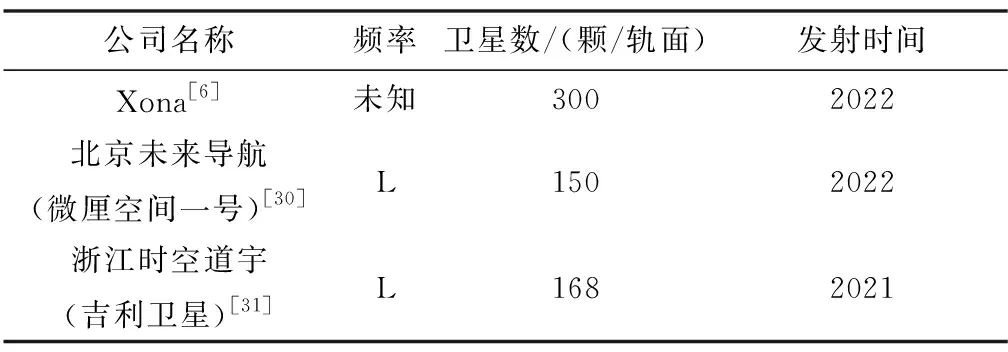
2020年,美国Xona Space公司提出规划,拟构建300颗低轨卫星的星座,提供具有更强信号功率、更强信号安全以及快速收敛的厘米级定位服务,简称Pulsar PNT服务[6]。2017年,北京未来导航科技有限公司公布了其微厘空间一号低轨导航增强星座设计,用于增强北斗定位精度、提升完好性并强化信号功率[30]。2019年,吉利科技旗下浙江时空道宇公司公布规划,面向自动驾驶等应用场景,拟构建由168颗低轨卫星构成的低轨星座,用于提供实时厘米级定位服务[31]。表2所示为具体低轨导航增强星座情况。
表2 低轨导航增强星座情况
Tab.2 LEO navigation augmentation constellation
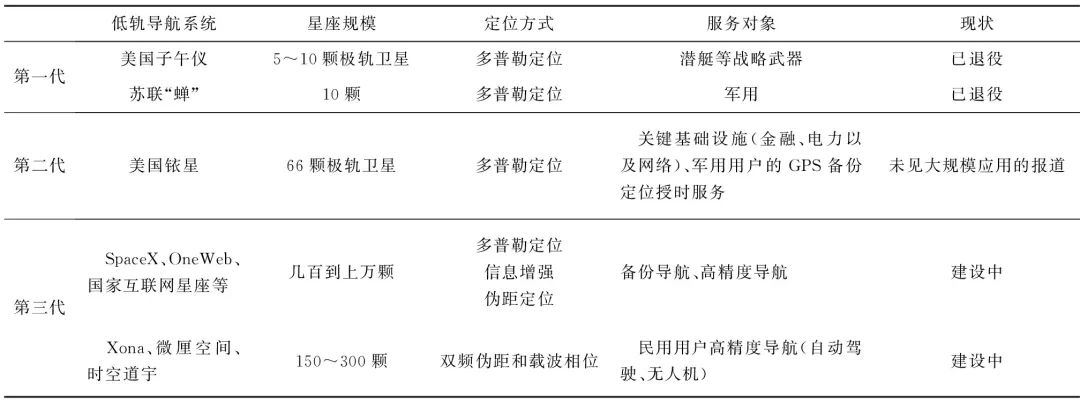
从低轨导航发展历程来看,最早的子午仪、蝉系统等用于向战略潜艇提供导航服务。铱星系统主要用于军事用户以及关键基础设施,提供GPS的备份导航服务。现阶段发展新一代低轨卫星导航系统的需求牵引主要是提供备份导航,并增强GNSS性能。表3所示为低轨导航发展的3个阶段。
表3 低轨导航发展的3个阶段
Tab.3 Three stages of the development of LEO navigation
1.2 低轨导航系统所应提供的增量能力
面向低轨导航系统的下一步发展,低轨导航可按技术体制和用途进行分类。
按照技术体制分为:低轨独立导航和低轨导航增强。低轨独立导航是低轨卫星播发类GNSS信号,提供独立导航服务,能够作为备份定位导航与授时(Positioning Navigation and Timing, PNT)技术手段之一。低轨导航增强是利用低轨星座提升现有中高轨卫星导航系统的精度、完好性以及天基监测的能力。
按照用途分为:民用和军用。从民用角度来看,需求主要包括米级导航、分米以及厘米级导航。目前来看,GNSS已经能够达到稳定的米级导航能力,对低轨导航系统的需求主要体现在高精度分米以及厘米级导航,因此米级的低轨独立导航对民用的吸引力相对不大。从军用角度来看,重点需要解决复杂电磁环境下的导航定位问题,低轨独立导航能够以较低的载荷代价提供更高的落地功率,从而直接响应军用用户的抗干扰需求;相比之下,军用用户对厘米级高精度服务的需求相对较弱。
1.3 低轨独立导航与当前中高轨卫星导航的能力对比分析
本节讨论低轨独立导航与GNSS性能,主要从4个方面进行分析:
1) 信号落地功率
在赋球波束条件下,信号落地功率与卫星信号到用户距离直接相关。以铱星(Iridium)卫星为例,在5°仰角可视时,其距离用户约为2800km;在天顶正上方时,其距离用户约780km。相比之下,GPS卫星距离用户从20000km到25000km。如图1所示,卫星空间衰减与距离平方成正比,铱星的落地功率大约比GPS卫星高30dB。从实际接收载噪比来看,GPS为45dBHz,而Iridium可以达到80~45dBHz[32]。

图1 卫星空间衰减与接收载噪比[32]
Fig.1 Signal spatial attenuation and signal reception carrier-to-noise ratio
2) 覆盖性
从用户角度来看,用户需要观测不少于4颗卫星才能定位,实际用户观测卫星数量往往需要6颗以上。由于低轨卫星覆盖区域较小,需要更多低轨卫星数量。如图2所示,以192颗极轨卫星为例,可见卫星数量平均为6.2颗[33],而SpaceX可见星平均数量将超过100颗[5]。从成本角度来看,按照单颗低轨卫星制造与发射成本为100万美元计算,192颗卫星不到2亿美元,远远小于GPS卫星单颗5亿美元的代价[6]。

图2 低轨卫星覆盖性[32]
Fig.2 Coverage of LEO satellites
3) 精度因子(Dilution of Precision,DOP)
DOP值代表了几何构型,DOP值越小说明卫星几何构型越好,相同测距误差情况下定位精度越好。相同覆盖重数下,低轨导航系统具有和现有中高轨卫星导航系统类似的DOP值分布;但低轨卫星具有低成本优势,低轨星座卫星数量可以更多,其DOP值相对于GNSS星座具有优势。根据2016年斯坦福大学仿真结果,现有GNSS的DOP值在1~3之间,而SpaceX等巨型星座的DOP普遍在1以内[5,32],如图3所示。
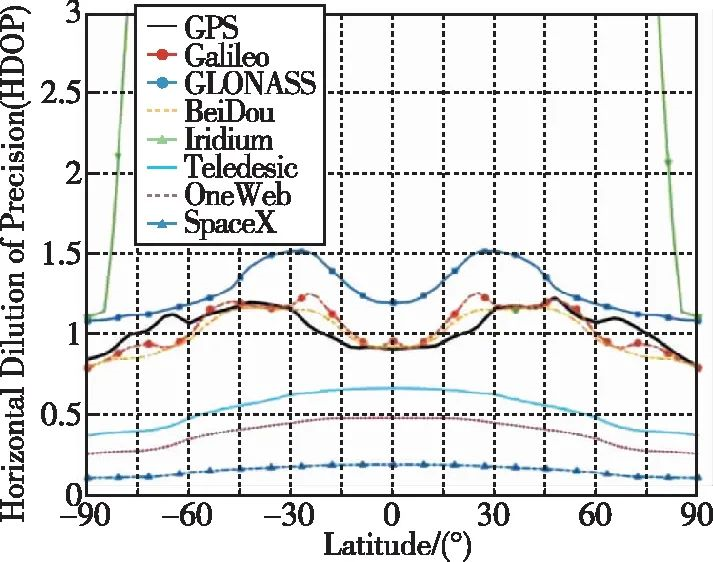
图3 不同星座DOP值[32]
Fig.3 DOPs of different constellations
4) 定位精度
用户定位精度=用户DOP值×用户测距误差(Signal-in-Space User Range Error,SIS URE)。
目前,GPS的SIS URE为0.82m,假定低轨卫星SIS URE模型与GPS类似,其SIS URE为3.3m[34]。由于低轨星座的DOP值小于GNSS星座,GNSS定位精度与LEO定位精度相当。
综上所述,在所需卫星数量方面,低轨卫星数量虽然远远多于GNSS卫星,但从成本来看,低轨卫星制造成本将低于GNSS卫星。在定位精度方面,现有GNSS定位精度水平与低轨独立定位精度相当,但是低轨信号与GNSS信号在信号频点、信号格式等方面存在兼容互操作问题,现有用户接收机需要重新设计开发,针对民用海量用户代价太大。因此,低轨独立导航对于普通大众用户用处不大。在用户落地功率方面,低轨导航系统具有明显优势,对于军用、重大基础设施保障而言,具有特殊的吸引力。
1.4 低轨增强GNSS高精度服务能力分析
低轨卫星轨道高度大约在800~1400km之间,处于北斗卫星(22000km)的下方,可以作为天基监测站,实现GNSS信号监测,进一步提升GNSS实时定轨/定钟能力。此外,采用低轨与中高轨卫星导航组合工作的方式,由低轨卫星播发导航测距信号,并广播高精度电文信息,可形成新质的高精度定位能力[35]。
传统PPP中,由于GNSS卫星轨道高、星座几何构型变化较慢,相邻历元间观测方程之间的相关性太强,因此在定位过程中需要经历相对较长的收敛时间(十几分钟至几十分钟),将载波相位模糊度收敛为整数以获取厘米级的高精度定位结果。低轨卫星星座的几何构型变化快(比中高轨星座快40倍左右),有利于缩短PPP的收敛时间,研究表明,GNSS/LEO联合高精度定位收敛时间可缩短至1min[33]。
低轨卫星高度低于GNSS卫星,利用低轨卫星对GNSS卫星进行观测,能够实现全球监测覆盖。利用低轨卫星作为天基监测站,一方面能够大大减少地面站依赖,另一方面有望提高定轨精度。欧洲开普勒计划采用6颗LEO实现对中轨道(Medium Earth Orbit,MEO)卫星天基监测,通过星间激光链路、高精度光钟以及地面观测的技术手段,对高中低轨卫星进行联合定轨,期望能够达到厘米级定轨精度[36]。
除了低轨增强系统以外,面向高精度导航的增强系统包括局域增强系统和星基广域高精度增强系统。其中局域增强系统采用RTK(Real-Time Kinematic)或者网络RTK的技术体制,星基广域高精度增强系统采用技术体制为PPP以及PPP-RTK方法[37]。
RTK技术采用双频载波相位动态实时差分方法,能够实现秒级瞬时厘米级的定位精度。RTK水平精度能够达到1cm+1ppm(RMS),垂直定位精度能够达到2cm+1ppm(RMS),高精度收敛时间一般是秒级,RTK建站密度一般在20~50km。
PPP技术采用双频伪距和载波相位观测数据以及卫星播发的精密GNSS卫星轨道、钟差产品,通过模型改正以及参数估计的方法实现高精度定位。实时PPP定位精度水平10cm(RMS),垂直20cm(RMS),收敛时间一般需要20~30min[37]。武汉大学赵齐乐团队基于BDS/GPS/Galileo组合PPP定位,模糊度固定解的收敛时间约为1.37min[38]。
PPP-RTK技术融合PPP和RTK两种技术的优势,利用局域网观测数据精化求解相位偏差、大气延迟等参数,重新生成各类改正信息并单独播发给用户。PPP-RTK定位精度与PPP相当,但是解决了非差模糊度的快速固定难题,使得收敛时间大大加快,目前的收敛时间能够达到1min[39]。
相对于现有增强方式,低轨增强定位精度与PPP、PPP-RTK相当,具有全球覆盖能力,收敛时间能够达到1min。与RTK和PPP-RTK相比,低轨增强能够全球覆盖,但是所需卫星数量也较多,至少是双重覆盖,微厘空间一号设计卫星星座数量为150颗[30]。
总之,低轨增强至少需要24个地面站[40],但需要150颗卫星才能达到厘米级定位的分钟级收敛[30],相比赵齐乐团队采用PPP方法实现的1.37min厘米级收敛[38],其优势并不是特别明显。低轨增强与PPP、RTK、PPP-RTK对比见表4。
表4 LEO增强、PPP、RTK、PPP-RTK对比
Tab.4 Comparison of LEO augmentation, PPP, RTK, PPP-RTK

1.5 关于低轨导航星座的建设方式分析
低轨导航建设方式分为低轨导航专用星座和低轨通信星座建设两种。
低轨导航专用星座采用专用导航卫星平台设计以及轨道设计,播发类似GNSS卫星导航信号[31]。低轨通信星座采用低轨通信卫星搭载导航载荷,播发导航信号[6,22]。两种星座实现方式的技术体制差别不大,低轨导航专用星座技术相对成熟,低轨通信星座可用频点资源更加丰富(L、Ka、Ku、V等),对于军用备份导航有强烈需求;面临的困难是与通信业务协调资源,一方面需要考虑低轨卫星信号设计,能够兼顾高精度测距以及大容量通信需求,另一方面卫星功率资源有限,涉及导航信号与通信信号协调发射功率资源。
虽然涉及信号体制设计和通信功能在资源协调方面的特殊困难,考虑到面向复杂电磁环境下抗干扰导航的需求,基于通信星座建设低轨导航系统存在特殊优势,一是在频率选择方面,除了可以选择L频率,还可以选择Ka、Ku、V等通信频率;二是通信信号落地功率高于现有L频段导航信号。因此,基于通信星座建设方式值得优先考虑。
2.1 时空基准
时空基准设计是整个卫星导航系统的核心,涉及时间基准建立与维持、低轨卫星定轨与预报等。从时空基准建立的基本思路来看,一种是依赖GNSS导航系统,将低轨星座的时空基准通过中高轨导航信号直接溯源至既有中高轨卫星导航系统时空基准;另一种是不依赖GNSS导航系统,通过在地面设置时空基准锚点,并依靠低轨星座内部微波或激光链路,将时空基准直接溯源至地面。目前讨论的热点是依赖GNSS导航系统建立时空基准[41-43]。
1) 依赖GNSS导航系统建立时空基准
• 时间基准建立与维持
GNSS时间基准依赖于星载原子钟,但是星载原子钟的功耗、尺寸、质量和成本难以适用于低轨卫星。低轨卫星目前只能采用芯片原子钟,但是芯片原子钟时钟稳定度与GNSS星载原子钟相差2个量级,因此低轨导航时间基准建立和维持与星载原子钟存在巨大差距。从高精度导航增强角度来看,时间基准建立与维持将是低轨系统需要解决的难题之一。表5所示为GNSS原子钟与Symmetricom公司SA.45芯片钟特性[44-45]。
表5 GPS卫星原子钟和芯片钟性能对比
Tab.5 Comparison of GPS satellite atomic clock and chip clock

• 空间基准建立与维持
为了保障高精度定位服务,低轨增强建设方需构建高精度空间基准,即具备低轨卫星高精度实时定轨的能力。传统的低轨卫星定轨主要采用两步法定轨方式,首先利用全球观测站的GNSS观测数据对GNSS卫星实时精密定轨,然后基于GNSS实时精密定轨产品与LEO卫星星载GNSS观测数据实现LEO精密定轨。
由于低轨导航卫星具备GNSS信号监测能力,针对低轨卫星/GNSS卫星一步法定轨成为研究热点。一步法定轨基于GNSS地面观测数据、GNSS-LEO观测数据、LEO-地面观测数据以及LEO-LEO星间链路数据联合解算,实时完成GNSS高精度定轨和LEO高精度定轨。相对于两步法定轨,一步法定轨具有更高的定轨精度,但是需要具备观测数据实时传输以及更大的数据处理能力[41,46]。
除此之外,部分学者还提出了基于LEO星载GNSS接收机的PPP技术实现LEO卫星高精度定位方法。试验采用Fugro的精密产品,其中GPS轨道精度为3~4cm(RMS),GPS时钟精度为0.1ns(RMS),LEO定位精度实现6.8cm(RMS)[42]。相对比定轨方法,星载PPP定位方法相对简单,但是依赖实时GNSS精密产品。
针对一步法定轨、两步法定轨以及星载PPP定位方法的选择将是下一步空间基准建立与维持需要研究的内容。
2) 不依赖GNSS导航系统建立时空基准
这方面既有的公开研究成果相对较少,类比中高轨GNSS,低轨星座时空基准需要星间链路以及大量地面站网,目前尚无成熟完整的解决方案,这也是未来需要研究的方向之一。
2.2 星座设计
星座设计与低轨增强应用需求密切相关,也与低轨导航系统的建设方式(专用低轨和导通融合系统)密切相关,需要从顶层设计开始进行系统规划与布局,其主要的设计牵引包括信号覆盖性和星座构型两方面。
1) 信号覆盖性
针对低轨独立导航需求,需要保障全球至少4重LEO覆盖。针对低轨增强GNSS需求,需要保障全球至少2重LEO覆盖。
2) 星座构型
常用的星座包括极轨道星座和Walker星座,其中通信星座一般采用极轨道星座,导航星座一般采用Walker星座。极轨道是指卫星在地球两极南北向运行的轨道,即轨道倾角为90°。几个具有相同卫星数、相同轨道高度和特定空间相位关系的极轨道平面构成了一个极轨道星座。极轨星座具有覆盖均匀特点。Walker星座由几个相同高度和倾角的圆轨道组成。每个轨道平面的升交点赤径在赤道面内均匀分布,所有卫星在轨道面上均布,Walker星座能提供稳定的全球或区域覆盖。Walker星座具有中低纬度覆盖特点。
现有低轨增强星座主要采用极轨与Walker星座相结合的设计,兼具全球覆盖和重点区域覆盖的特点[30]。针对极轨与倾斜轨道的混合星座设计,从覆盖性、星间链路、轨道环境、实现代价等方面,如何合理且高效地保障全球均匀以及重点服务区域的导航/导航增强服务,还需进一步研究。
2.3 信号体制
低轨导航信号体制设计是低轨导航核心之一,涉及信号频点/带宽、发播机制、调制格式、功率配置以及电文设计等要素[43],而其设计主要考虑:一是低轨导航增强层面,需要关注与现有导航信号的兼容性与互操作性;二是低轨导航通信融合层面,重点关注与卫星通信信号一体化设计与应用问题。
• 低轨增强信号体制
在信号频点选择方面,首要考虑的是低轨增强信号与GNSS信号频点兼容[31]。国际电信联盟(International Telecommunication Union,ITU)在L频段划分了1164~1215MHz、1215~1260MHz、1260~1300MHz和1559~1610MHz共137MHz导航信号频率,在L频段划分了1518~1525MHz共7MHz通信信号频率。低轨导航信号频率将从上述频率拥挤的L频率中选择,并满足相关ITU规定[47]。
在信号调制方式方面,首先需要与现有信号体制相兼容,同时也需要提升民用导航公开服务的抗欺骗能力。铱星采用信号加密方式,满足授权用户服务,同时采用数字波束认证机制提升抗欺骗能力[15]。Xona采用信号加密与电文认证相结合的方式,保障用户服务安全性[48]。
从低轨高精度增强角度出发,需要设计广播电文能够表征低轨卫星高精度轨道和钟差。低轨卫星轨道主要与摄动力相关,与中高轨卫星所受摄动力相比,低轨卫星受到大气阻力影响,其受到摄动力更为复杂。现有北斗广播星历参数无法表征低轨卫星轨道,因此低轨卫星广播电文设计也成为难点之一。文献[49]针对低轨卫星的短期动力学特性,提出了一组针对LEO的轨道状态22参数广播星历,以满足用户低轨高精度轨道计算需求。
• 低轨导航通信融合信号体制
从低轨导航通信融合需求出发,可选择卫星通信的频率资源,包括L、C、Ku以及Ka等。其中Ka频段的优点是可用带宽大(200MHz以上),可采用点波束播发,抗干扰能力强;缺点包括传播损耗大,同等传播距离比L频段高20dB以上,且易受天气影响,雨衰大。以30dBW典型等效全向辐射功率(Equivalent Isotropic Radiated Power,EIRP)为例,在不考虑雨衰时,轨道高度1000km,落地功率在-159dBW左右,与传统L导航信号相当[50]。
在信号调制方式方面,则需要考虑导航信号与通信信号一体化设计。国内低轨互联网星座采用了类似于铱星STL信号设计,导航增强帧通过使用通信信号的部分时隙,实现与Ka通信信号的兼容性[50]。
2.4 监测评估技术
现有监测评估主要是面向GNSS[54],随着低轨导航增强系统建设和发展,监测评估将拓展到低轨导航增强。但是由于LEO单星覆盖性较小,现有地面监测网密度远远不够,如何实现低轨导航监测评估将是技术挑战之一。从监测站网设计来看,一方面可以增强现有监测站数量;另一方面探索低轨卫星监测方式,即采用类似现有漏GNSS技术[55],通过接收地球对面的漏LEO信号,实现对LEO信号监测。
低轨导航监测评估的使命是完成第三方监测与性能评估,为导航用户提供实时、连续、可信、稳定的系统效能监测信息,例如:定轨精度、完好性、防欺骗等效能监测,以支撑系统预警与用户决策。现阶段针对低轨导航的监测尚属空白,这也是未来需要研究的重点之一。
本文针对基于低轨卫星星座的导航技术开展讨论,分析了低轨导航潜在的应用方向和面临的技术挑战,主要意见如下:
1) 低轨导航有两类可供选择的应用方向,一是建设独立的低轨导航系统,满足复杂电磁环境下的米级精度抗干扰导航定位需求;二是建设低轨导航增强系统,与中高轨GNSS联合工作,缩短PPP厘米级定位的收敛时间,相比建立独立低轨导航系统而言,其所需的星座规模相对较小。
2) 利用较少数量的低轨卫星,开展对现有中高轨GNSS卫星信号的天基监测和高精度定轨,可有效降低中高轨GNSS的地面建站压力,并提升定轨精度,具有一定的实用价值。
3) 相比于建立低轨导航专用星座,基于通信星座建立低轨导航系统,在信号频点选择(对应于抗干扰)、星座建设与运营成本等方面具有特定优势。
4) 相比现有的厘米级高精度导航增强技术,低轨导航增强具有全球覆盖以及收敛时间相对较短的优势,但在通信网络和地面站覆盖较为密集的区域,其与既有的RTK、PPP-RTK技术相比优势并不明显;在通信网络和地面站不覆盖区域有一定的优势,但高精度定位收敛时间缩短的程度相对有限。考虑实际的应用效能,其必将与RTK、PPP技术以及正在快速迭代发展的PPP-RTK技术形成激烈竞争,在考虑综合成本代价的情况下,孰优孰劣还有待进一步观察。
5) 低轨导航系统走向应用尚存在多项关键技术挑战,主要包括时空基准、星座设计、信号体制以及低轨信号监测评估。特别是低轨信号监测评估,由于低轨导航监测评估客观上需要远大于中高轨GNSS的布站密度,从而带来巨大建设与运营成本,需要深入研究。低轨卫星间的相互信号监测可能是解决该问题的有效方式。
总之,低轨导航既是一个老名词,也是当前历史条件下的新生事物。在低轨卫星系统走向全面建设的历史性关头,认真思考低轨导航系统未来的应用前景,识别并攻克相应关键技术,具有重要意义。
>>>
充满激情的新时代,
充满挑战的新疆域,
与踔厉奋发的引领者,
卓尔不群的企业家,
一起开拓,
一起体验,
一起感悟,
共同打造更真品质,
共同实现更高价值,
共同见证商业航天更大的跨越!
——《卫星与网络》,观察,记录,传播,引领。
>>>
· 《卫星与网络》特别顾问:王兆耀
· 《卫星与网络》编辑委员会
高级顾问:王国玉、吴炜琦、刘程、童旭东、相振华、王志义、杨烈
编辑委员:曹志刚、陈嵩辉、邓中亮、荆继武、景贵飞、郎燕、刘进军、刘天雄、宁振波、秦智、汪春霆、吴季、徐小舒、阎丽娟、赵敏、肇启明、周建华、朱铎先
· 《卫星与网络》创始人:刘雨菲
· 《卫星与网络》副社长:袁鸿翼
· 《卫星与网络》常务副社长:冉承新