
港中文自动驾驶点云上采样方法
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

Abstract
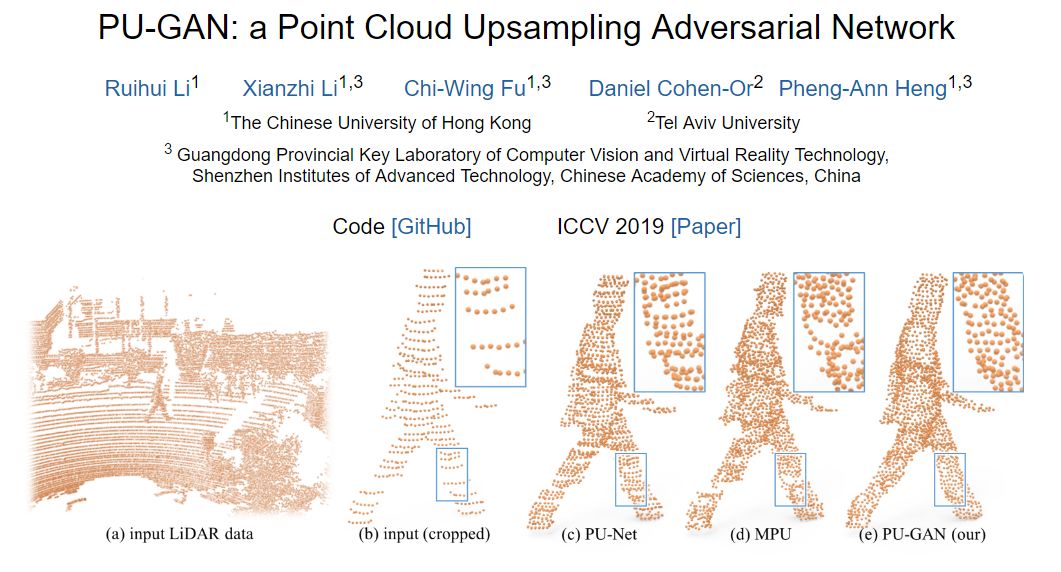
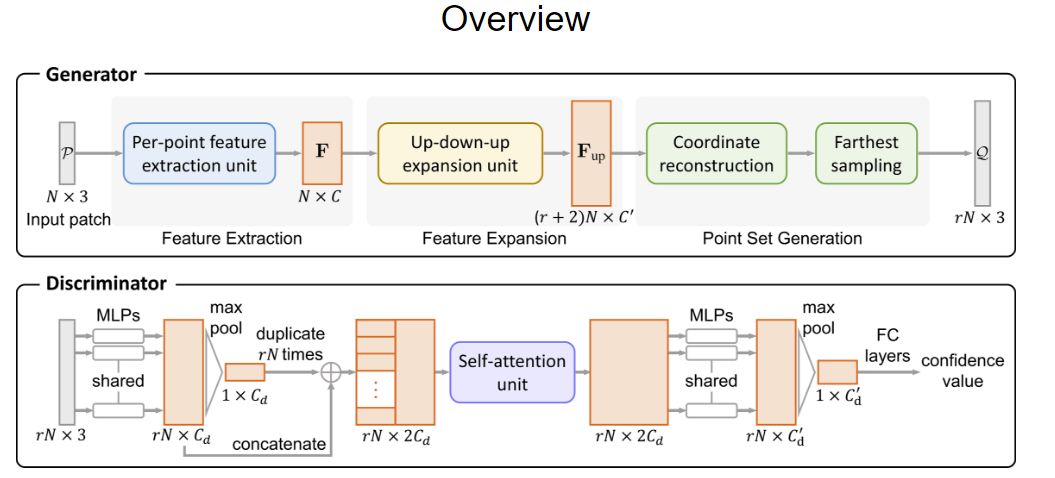
Point clouds acquired from range scans are often sparse, noisy, and non-uniform. This paper presents a new point cloud upsampling network called PU-GAN, which is formulated based on a generative adversarial network (GAN), to learn a rich variety of point distributions from the latent space and upsample points over patches on object surfaces. To realize a working GAN network, we construct an up-down-up expansion unit in the generator for upsampling point features with error feedback and self-correction, and formulate a self-attention unit to enhance the feature integration. Further, we design a compound loss with adversarial, uniform and reconstruction terms, to encourage the discriminator to learn more latent patterns and enhance the output point distribution uniformity. Qualitative and quantitative evaluations demonstrate the quality of our results over the state-of-the-arts in terms of distribution uniformity, proximity-to-surface, and 3D reconstruction quality.
从距离扫描获得的点云通常是稀疏的、有噪声的和不均匀的。提出了一种基于生成对抗网络(GAN)的点云上采样网络PU-GAN,用于从目标表面的潜在空间和斑块上的上采样点学习丰富的点分布。为了实现一个工作的GAN网络,我们在发生器中构造了一个上下向上扩展单元,用于误差反馈和自校正的上采样点特征,并构造了一个自关注单元以增强特征的集成度。进一步,我们设计了一个具有对抗性、一致性和重构项的复合损耗,以鼓励鉴别器学习更多的潜在模式,提高输出点分布的均匀性。定性和定量评估表明,我们的结果在艺术状态的分布均匀性,接近表面,和三维重建质量的质量。
https://arxiv.org/abs/1907.10844 ; https://liruihui.github.io/publication/PU-GAN
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~