
C++ 中的卷积神经网络 (CNN)
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

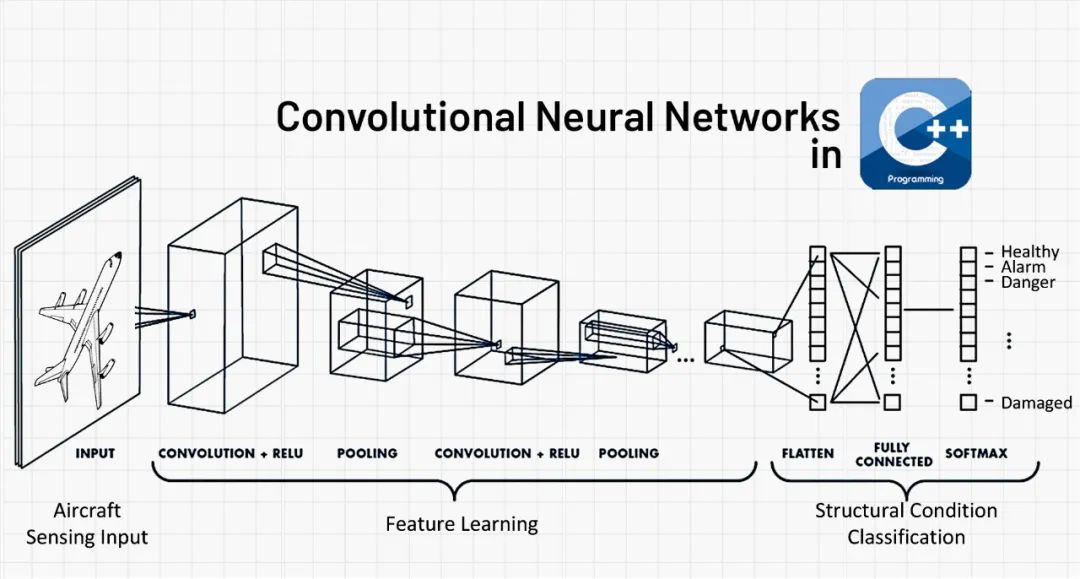
有很多卷积神经网络文章解释了 CNN 是什么以及它的用途是什么,而本文将用 C++ 编写一个 CNN 和一个名为 mlpack 的库来对MNIST数据集进行分类。
你们可能会问为什么 C++ 在 Python 中很容易使用大量库,你们现在可能已经看到一些特斯拉汽车,这些类型的系统需要从它们的环境中进行实时推理,而 Python 非常适合原型设计,但不提供实时当使用它部署如此庞大的模型时会更新。
一、mlpack的含义
它是一个用 C++ 编写的机器学习库,它利用其他一些底层库来提供快速且可扩展的尖端机器学习和深度学习方法。
二、MINST数据集
我们要使用的数据包含在一个 CSV 文件中,由 0 到 9 的数字图像组成,其中列包含标签,行包含特征,但是当我们要将数据加载到矩阵中时,数据将被转置,并且提到哪个特征的标签也将被加载,所以我们需要注意这一点。
using namespace mlpack;using namespace mlpack::ann;// Namespace for the armadillo library(linear algebra library).using namespace arma;using namespace std;// Namespace for ensmallen.using namespace ens;
然后我们将声明一个辅助函数将模型输出转换为行矩阵,以匹配我们加载的行矩阵形式的标签。
arma::Row<size_t> getLabels(arma::mat predOut){arma::Row<size_t> predLabels(predOut.n_cols);for(arma::uword i = 0; i < predOut.n_cols; ++i){predLabels(i) = predOut.col(i).index_mat() + 1;}return predLabels;}
在这一部分下面,代码将出现在main函数中,但它的编写并不是为了让代码易于解释。现在我们将声明一些我们需要的明显训练参数,将解释那些突出的参数。
constexpr double RATIO = 0.1; // ratio to divide the data in train and val set.constexpr int MAX_ITERATIONS = 0; // set to zero to allow infinite iterations.constexpr double STEP_SIZE = 1.2e-3;// step size for Adam optimizer.constexpr int BATCH_SIZE = 50;constexpr size_t EPOCH = 2;mat tempDataset;data::Load("train.csv", tempDataset, true);mat tempTest;data::Load("test.csv", test, true);
参数 MAX_ITERATIONS 设置为 0,因为这允许我们在一个 epoch 中无限迭代,以便在训练阶段后期使用提前停止。作为旁注,当此参数未设置为 0 时,也可以使用提前停止。
让我们处理和删除描述每一行中包含的内容的列,如我在数据部分所述,并为训练、验证和测试集的标签和特征创建一个单独的矩阵。
= tempDataset.submat(0, 1, tempDataset.n_rows - 1, tempDataset.n_cols - 1);mat test = tempTest.submat(0, 1, tempTest.n_rows - 1, tempTest.n_cols - 1);mat train, valid;data::Split(dataset, train, valid, RATIO);const mat trainX = train.submat(1, 0, train.n_rows - 1, train.n_cols - 1);const mat validX = valid.submat(1, 0, valid.n_rows - 1, valid.n_cols - 1);const mat testX = test.submat(1, 0, test.n_rows - 1, test.n_cols - 1);const mat trainY = train.row(0) + 1;const mat validY = valid.row(0) + 1;const mat testY = test.row(0) + 1;
我们将使用负对数似然损失,在 mlpack 库中,它的标签从 1 而不是 0 开始,因此我们在标签中添加了 1。
三、卷积框架
现在让我们看一下我们将要定义的简单卷积架构。
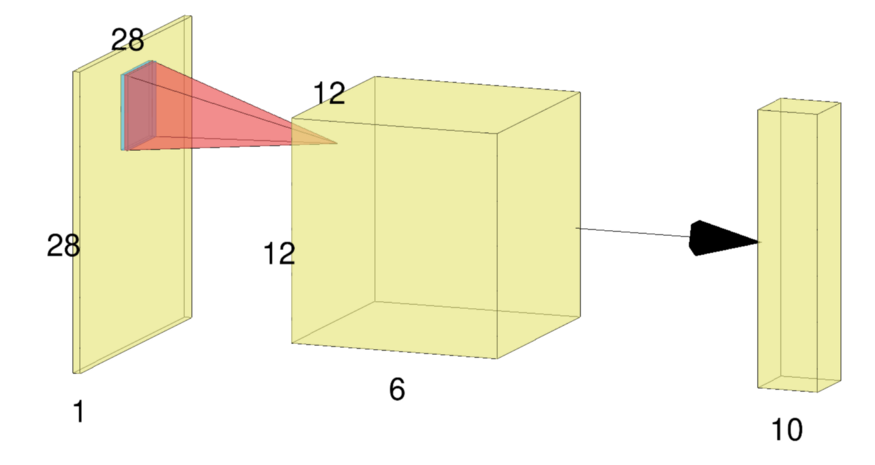
FFN<NegativeLogLikelihood<>, RandomInitialization> model;model.Add<Convolution<>>(1, // Number of input activation maps.6, // Number of output activation maps.5, // Filter width.5, // Filter height.1, // Stride along width.1, // Stride along height.0, // Padding width.0, // Padding height.28, // Input width.28 // Input height.);model.Add<ReLULayer<>>();model.Add<MaxPooling<>>(2, // Width of field.2, // Height of field.2, // Stride along width.2, // Stride along height.true);model.Add<Convolution<>>(6, // Number of input activation maps.16, // Number of output activation maps.5, // Filter width.5, // Filter height.1, // Stride along width.1, // Stride along height.0, // Padding width.0, // Padding height.12, // Input width.12 // Input height.);model.Add<ReLULayer<>>();model.Add<MaxPooling<>>(2, 2, 2, 2, true);model.Add<Linear<>>(16 * 4 * 4, 10);model.Add<LogSoftMax<>>();
其他细节的展示:
ens::Adam optimizer(STEP_SIZE, // Step size of the optimizer.BATCH_SIZE, // Batch size. Number of data points that are used in each iteration.0.9, // Exponential decay rate for the first moment estimates.0.999, // Exponential decay rate for the weighted infinity norm estimates.1e-8, // Value used to initialise the mean squared gradient parameter.MAX_ITERATIONS, // Max number of iterations.1e-8, // Tolerance.true);model.Train(trainX,trainY,optimizer,ens::PrintLoss(),ens::ProgressBar(),ens::EarlyStopAtMinLoss(EPOCH),ens::EarlyStopAtMinLoss([&](const arma::mat& /* param */){double validationLoss = model.Evaluate(validX, validY);std::cout << "Validation loss: " << validationLoss<< "." << std::endl;return validationLoss;}));
正如你们可以看到在验证准确性上使用 EarlyStopAtMinLoss,这就是将参数 MAX_ITERATIONS 设置为 0 以让我们定义无限迭代的原因。
mat predOut;model.Predict(trainX, predOut);arma::Row<size_t> predLabels = getLabels(predOut);double trainAccuracy = arma::accu(predLabels == trainY) / ( double )trainY.n_elem * 100;model.Predict(validX, predOut);predLabels = getLabels(predOut);double validAccuracy = arma::accu(predLabels == validY) / ( double )validY.n_elem * 100;std::cout << "Accuracy: train = " << trainAccuracy << "%,"<< "\t valid = " << validAccuracy << "%" << std::endl;mat testPredOut;model.Predict(testX,testPredOut);arma::Row<size_t> testPred = getLabels(testPredOut)double testAccuracy = arma::accu(testPredOut == testY) /( double )trainY.n_elem * 100;std::cout<<"Test Accuracy = "<< testAccuracy;
本文代码链接:https://github.com/Aakash-kaushik
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~