
3D视觉检测的未来:光度立体技术
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
利用3D表面定向,特别是它对反射光的影响,工业应用的光度立体产生对比度图像,突出了局部3D表面变化。
由于有了专门的新算法,人们越来越意识到良好的照明对于机器视觉的成功的必要性,以及低成本的多光解决方案,这项技术越来越受到关注。

真实世界的物体有三个维度:高度,宽度和深度。为了使机器人等自动化系统成功运行,他们需要能够“看到”这三个维度。它们通过机器视觉系统提供这种“视觉”功能,其包括相机,照明和用于图像处理的PC。
然而,减少必须处理正确定位和分析对象数据量是机器视觉行业面临的最重要的挑战之一。
为了缩小数据,机器视觉设计师将使用滤镜,灯光和黑白相机。这些涉及彩色机器视觉应用。由此产生的灰度图像可以更快地处理,因为它们包含较少的数据。
同样,工程师将开发运动控制系统和机械夹具,以便使用2D机器视觉解决方案解决传统的3D应用。
采用当今的微处理器,现场可编程门阵列(FPGA)和图形处理器单元(GPU),设计人员可以获得更高的处理能力。但是,处理能力仍然是有限的。用于3D应用的最具成本效益的解决方案可以通过已知具有“光度立体声”的新生机器视觉技术来提供。
通过负担得起的处理能力,减少了减少彩色和3D应用所需数据量的需求。
通过用于基于传送器的3D系统的集成激光三角测量系统提供了一个示例,该系统通过廉价的数据处理、激光和光学来实现。在创建3D对象映射的过程中每秒能够生成数万个2D轮廓。
另一种选择是由新的飞行时间相机提供。它们为各种应用提供低分辨率3D地图,没有激光照射的安全风险。
对于面积更大的3D项目,通过在机器人的末端安装单个相机摄影测量系统,可以从不同位置拍摄同一物体的多幅照片。
使用这些图像,可以基于相机和对象之间的预定几何关系来计算图像中的每个像素的3D位置。关于大面积3D检查,两个摄像机并排排列以模仿人眼并捕获3D信息。
然而,为了在没有大视场的情况下高速检查物体,定性数据可能非常有用,而定量3D数据并不总是用于测量目的。这是光度立体技术介入的地方。
测量任何给定像素的高度不是光度立体声的主要考虑因素。相反,该技术通过使用3D表面取向及其对反射光的影响产生对比度图像,突出局部3D表面变化。使用传统的2D成像时,显示的变化可能是不可见的。
当使用光度立体解决方案时,没有必要知道测试对象和相机之间的精确3D关系,也不必使用两个相机来捕获3D数据。而是使用具有多个照明源的单个相机系统。
通过在不同光照条件下观察物体,在光度立体技术期间估计其表面。该方法的基础是观察到表面反射的光量取决于表面相对于光源和观察者的取向。
由于新的专业算法,人们越来越意识到需要良好的照明以确保机器视觉成功,以及低成本的多光解决方案,例如Smart Vision Lights的LED灯管理器(LLM)(允许通过以下方式控制四个灯)基于浏览器的简单界面,成本低于帧抓取器或智能相机分线盒,光度立体声在工业应用中的应用越来越受到关注。
目前,光度立体应用的独特优点使得许多以前难以或不可能解决的常见工业检测应用成为可能。
机器视觉系统在读取零件凸起的字母时一直存在问题。这个示例显示了一个具有许多功能表面特性的塑料连接器,以及一个方向符号和数字。没有对比,因为在凸起的字母和组成剪辑的材料之间没有任何区别。
制造商已经在诸如轮胎之类的较大物体上使用激光三角形系统,以便创建3D表面图。这些激光扫描系统通常是用于3D测量的复杂且昂贵的解决方案,即使它们最近变得更加集成和有效。




在这些照片(图1-4)中,智能视觉灯的线性微光(LM) LED灯被定位在90度、180度、270度和360度周围,以照亮黑色的塑料夹子。它们由LLM控制。由于每一次曝光都是由Matrox相机触发的,因此LLM会从不同的方向触发光线。

每个图像由相机馈送到运行图像库光度立体定位算法的PC中。这组合了所有相应的像素,建立了局部表面特性并从中产生了一种或多种类型的合成图像。示例可以包括局部3D几何形状的对比图像或反照率图像(图5)。
这些合成图像所揭示的信息比任何单独组成的图像所揭示的信息都要多。在剪辑表面形成黑底黑字的边缘清晰地显示在合成图中。此外,还展示了组成整体的各种注塑件的边缘。
在下一个例子中,显示了四张合成皮革材料的图片(图6-9)。人造革,与其模仿的有机材料类似,具有相当大的表面纹理。人眼几乎不可能在整个图像上可视化100%的表面纹理,更不用说计算机了。


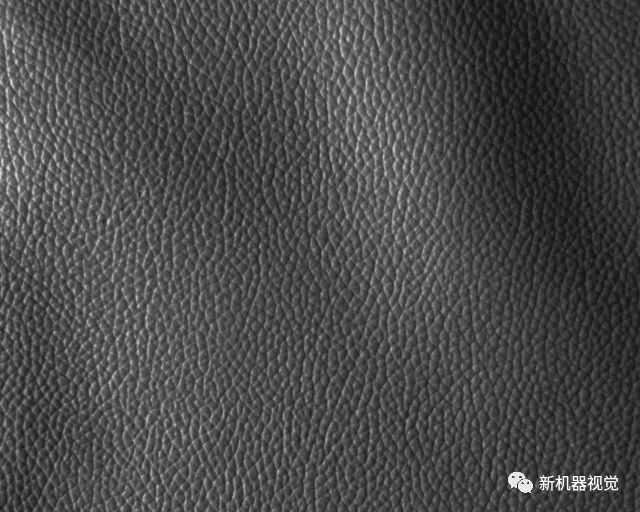
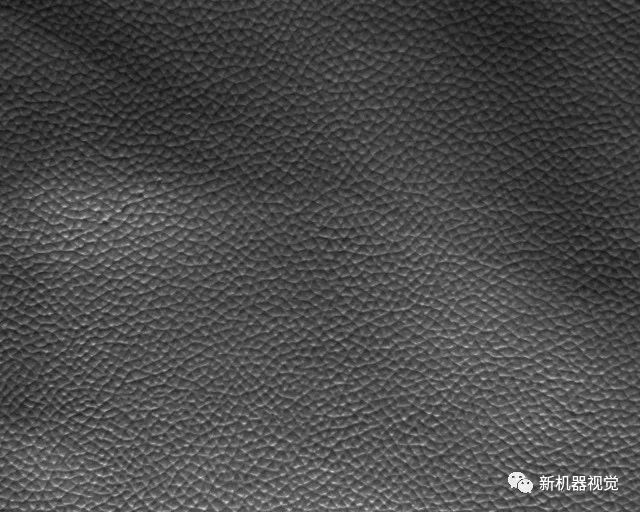
在每个组成图像中,当材料的翘曲位于支撑基板上时产生强阴影,而由于强烈的光反射,图像的其他部分趋于饱和。
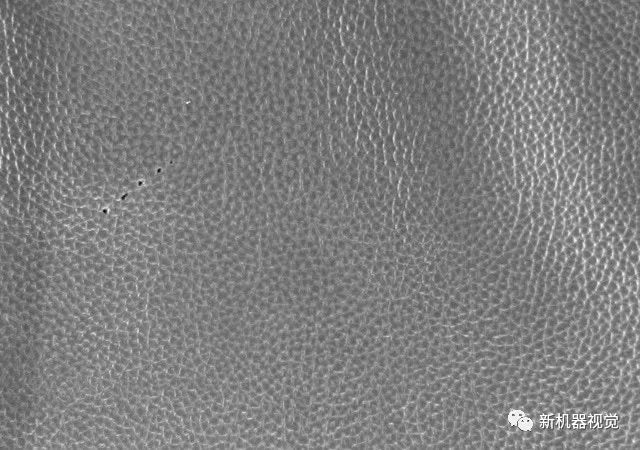
光度立体定位算法(图10)产生最终构图,其显示在相机视野的整个区域上均匀照明的纹理,在每个缝隙上具有鲜明的对比度并且突出显示孔。
也可以在金属加工表面(如发动机头)上的孔上使用光度立体技术。由于这些具有成本效益的光度立体解决方案而显然具有优势的其他领域是铸造部件,激光标记和直接部件标记系统。
我们生活的3D世界将继续依赖于3D视觉解决方案。DBMR Research最近的一项预测预测,2017年至2024年期间全球3D机器视觉市场的增长率将达到9.5%的复合年增长率,其年度价值将从154亿美元增加至近320亿美元。
然而,高昂的安装成本和缺乏技术知识构成了3D机器视觉市场增长的最大挑战。作为封装的光度计立体声配准工具和LLM LED灯管理器的一键编程,机器视觉行业已准备好迎接3D机器视觉的下一个重要步骤。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~