
总结 | 机器视觉在智能交通中的应用
点击左上方蓝字关注我们

转载自 | 新机器视觉

车牌识别
车牌识别技术(VLPR)是计算机视觉和模式识别技术在现代智能交通系统中的一项重要研究课题,是实现交通管理智能化的重要环节。车牌识别技术要求能够将运动中的汽车牌照从复杂背景中提取并识别出来,通过获取原图像,图像预处理,车牌定位,字符分割和字符识别等技术,识别车辆牌号、颜色等信息。
车牌识别在交通中已经应用了很多年,但实际中还有很多车牌是很难准确识别的,比如随意大角度倾斜的车牌,在过去很多年其实解决的都不好,可以说过去3-5年车牌识别技术曾处于一种瓶颈期,但现在这两年可以看到有些已经可以识别了,这其实很大程度上得益于深度学习技术的应用,有了新的突破,各种姿态的,各种角度的车牌都能很好的识别。目前最新的技术水平为字母和数字的识别率可达到99.7%,汉字的识别率可达到99%。

行车违章检测
目前,城市道路中的摄像头越来越多,也有越来越多的计算机视觉技术被用于自动检测交通的违规行为,如超速、闯红灯或停车标志、错误驾驶和非法转弯,这个在高速公路和城市交叉口上的应用非常广泛。但由于之前存在较多的误报,实际效果离真正的需求还有一段差距。而借助深度学习技术,能实现真正准确的交通违章和交通事件检测,真正的帮交通运营部门提供准确及时的报警信息。

停车占用检测
在机器视觉应用之前,在外场要感知车位是否被占用,一般通过地磁感知,成本非常高,系统可靠性也是问题。基于视频和图像的路侧违法停车的感知和抓拍,则可以很好的解决这个问题,一台摄像机即可监控和感知一大片区域的停车位是否被占用,成本低还所见即所得。

行人检测
行人检测( Pedestrian Detection)是利用计算机视觉技术判断图像或者视频序列中是否存在行人并给予精确定位。该技术可与行人跟踪,行人重识别等技术结合,应用于人工智能系统、车辆辅助驾驶系统、智能机器人、智能视频监控、人体行为分析、智能交通等领域。
行人兼具刚性和柔性物体的特性,外观易受穿着、尺度、遮挡、姿态和视角等影响。因此,精确的行人检测难度较大,其中涉及许多类型的传感器,如传统的闭路电视(CCTV)或IP摄像机、热成像设备、近红外成像设备和车载RGB摄像头。现有行人检测方法有三种,分别为基于全局特征的方法、基于人体部位的方法、基于立体视觉的方法。目前,基于深度卷积神经网络的行人检测已经取得了很大的进展,甚至可以检测出深度遮挡的行人。

交通流量分析
目前,中国很多城市交通拥堵很严重,很多十字路口的红绿灯配时其实并不是最优的,机器视觉将在缓解城市拥堵中发挥重要的作用。
对于交叉口,通过基于深度学习的车辆精确感知检测,可以精准的感知交通路口各个方向的车辆数量、流量和密度,从而可以给交通路口的最优配时提供准确依据。如果各个路口都用上这种车辆检测技术,那对交通拥堵将是极大的缓解。
对于路段,通过路段的感知,可以基于原有监控系统获取到道路的总体交通路况,通过这种车辆检测技术就可以为道路路况分析、交通大数据、交通规划等提供可靠的数据依据。

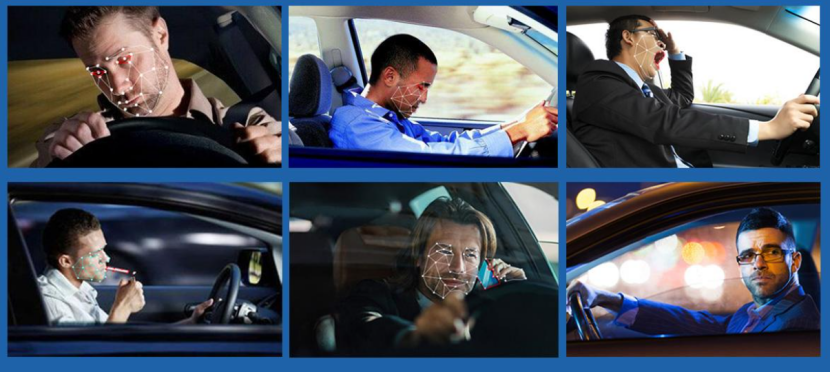
驾驶员注意力检测
据统计,60%以上的交通事故的主要原因是驾驶员的分心,包括疲劳驾驶、开车看手机、注意力不集中等。基于面向驾驶员的视频分析技术通过注视方向、头部姿势估计和面部表情监控算法检测面部和眼睛。人脸检测算法能够检测出注意力集中的和不集中的人脸。深度学习算法能够检测眼睛聚焦和非聚焦的差异,以及受此影响的驾驶迹象。在驾驶员分心检测中,有多种深度学习方法(RNN和CNN)应用于实时分心驾驶员姿态分类。
一旦系统判定驾驶员的状态让行车安全降低,即会发出声频警示信号,并在仪表盘显示屏上闪现“请休息片刻”或“集中驾驶注意力”等提示信息。这将极大地提升驾驶主动安全性。
辅助驾驶和无人驾驶
在辅助驾驶和无人驾驶中,车辆在行驶时需要实时地去感知周围的环境,包括行驶在哪里、周围有什么障碍物、当前交通信号怎样等等。这就需要多类传感器,摄像头就是其中之一。
由于摄像头数据(图片)包含丰富的颜色信息,所以对于精细的障碍物类别识别、信号灯检测、车道线检测、交通标志检测等问题就需要依赖计算机视觉技术。主要内容有如下四点:
①使用双目视觉系统获取场景中的深度信息。它可以帮助进行后续的图像语义理解,在无人驾驶中可以帮助探索可行驶区域和目标障碍物。
②通过视频来估计每一个像素的运动方向和运动速度。
③对物体进行检测与追踪。在无人驾驶中主要是各种车辆、行人、非机动车。
④对于整个场景的理解。最重要的有两点,第一是道路线检测,其次是在道路线检测下更进一步,即把场景中的每一个像素打成标签,这叫做场景分割或者场景解析。

计算机视觉技术过去5年内取得的成绩甚至是远远超过了之前的20年,这主要得益于深度学习技术带来的巨大进步。在未来,以深度学习技术为核心的计算机视觉技术将大大提升智能交通系统的感知精度与维度,从而更好地服务大众出行。
END
整理不易,点赞三连↓