
不仅会前、后空翻,还能跨栏、桶滚......MIT“迷你猎豹”机器人成功模仿人类
长期以来,仿真机器人似乎总是难以达到、甚至超越人类般的运动敏捷程度,人们对机器人的印象基本是“铁块头”、笨拙、运动迟缓......如何制造一个可以在平坦路面上行走,而且不会摔倒,甚至可能偶尔爬爬楼梯的双足机器人,一直以来都是科学家们面临的一个难题。
事实上,人们在这一领域已经取得了众多突破性成果。例如,在波士顿动力等公司的努力下,如今的双足机器人至少能达到人类的运动技能。而下一个目标,就是突破人类表演极限——特技。
近日,来自麻省理工学院的研究人员研发了一种特技机器人,通过一些步态探索和简单的四条腿特技,希望让未来机器人的肢体运动更加精细化。具体而言,这种特技机器人身高约为 0.7 米,体重约为 21 公斤,很像一只直立版的迷你猎豹。
研究人员表示,该机器人的腿部有五个定制的执行器:三个位于臀部,一个位于膝盖,还有一个用于控制脚踝的转动。膝盖、脚踝和关节均有一个皮带传动系统,以在这些关节提供更高的扭矩。五个执行器使得每条腿在每只脚上产生三维地面反作用力,以及每只脚的转动和偏航轴的力矩。
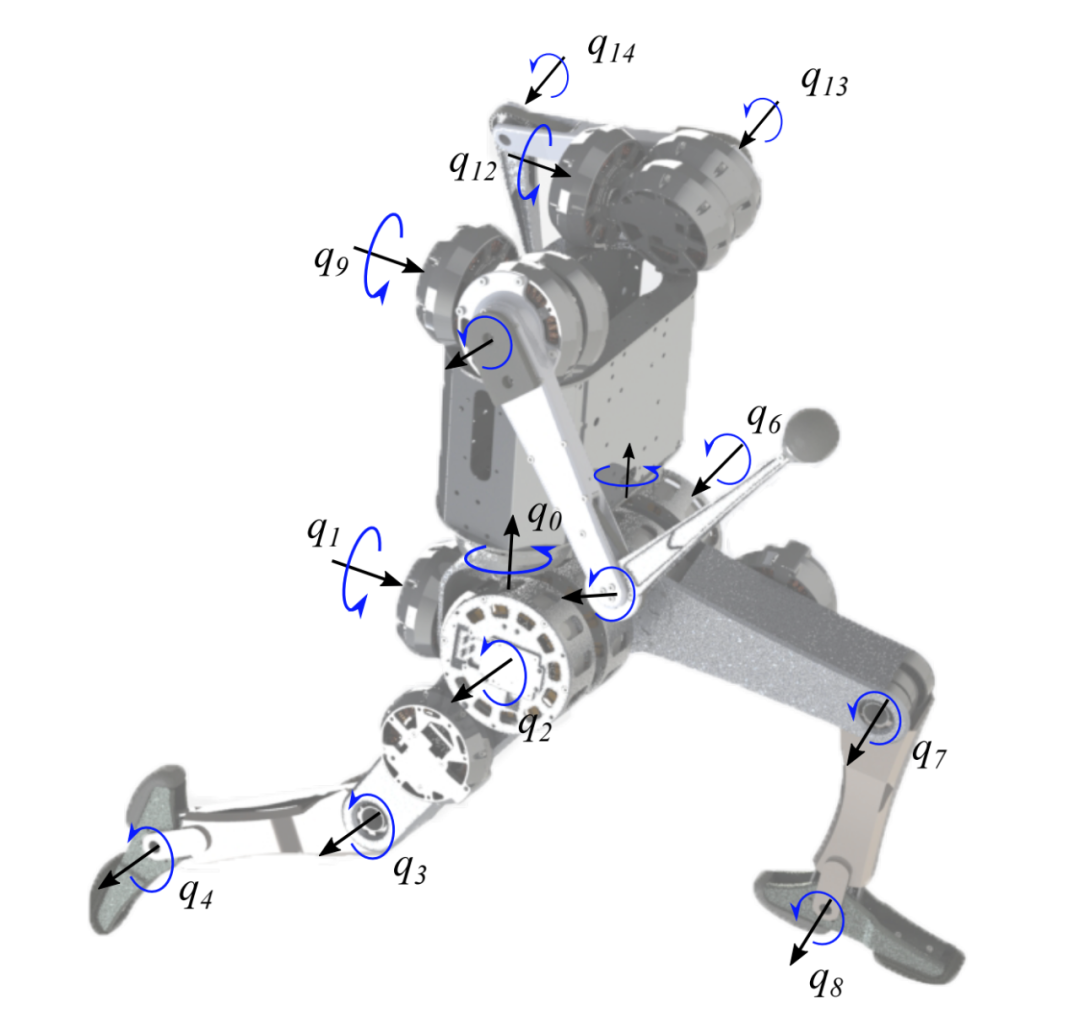 图|特技机器人拥有 5 个自由度的腿和 3 个自由度的手臂,踝关节只有俯仰方向驱动,两个接触传感器分别位于脚尖和脚后跟(来源:arXiv)
图|特技机器人拥有 5 个自由度的腿和 3 个自由度的手臂,踝关节只有俯仰方向驱动,两个接触传感器分别位于脚尖和脚后跟(来源:arXiv)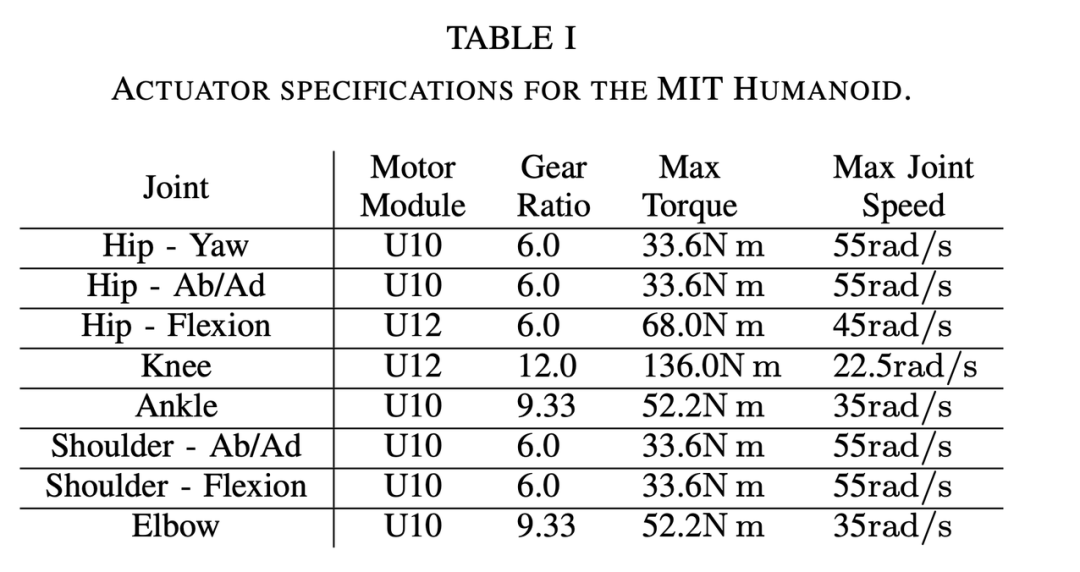 图|特技机器人的执行器规格
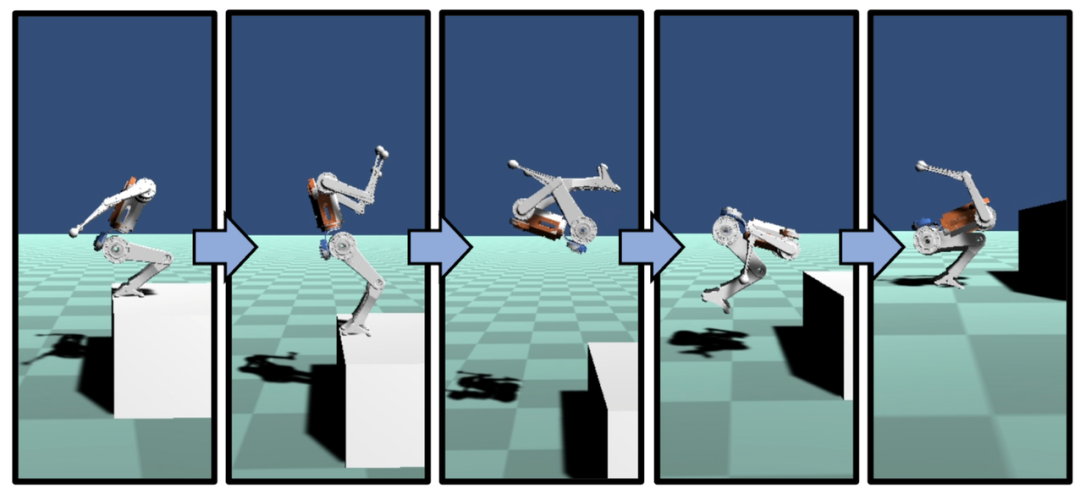
图|特技机器人的执行器规格在先进原理和精密电机的加持下,仿真机器人实现了“惊险的跳跃”。仿真机器人的“后空翻”运动分为三个阶段:起飞、飞行和着陆。
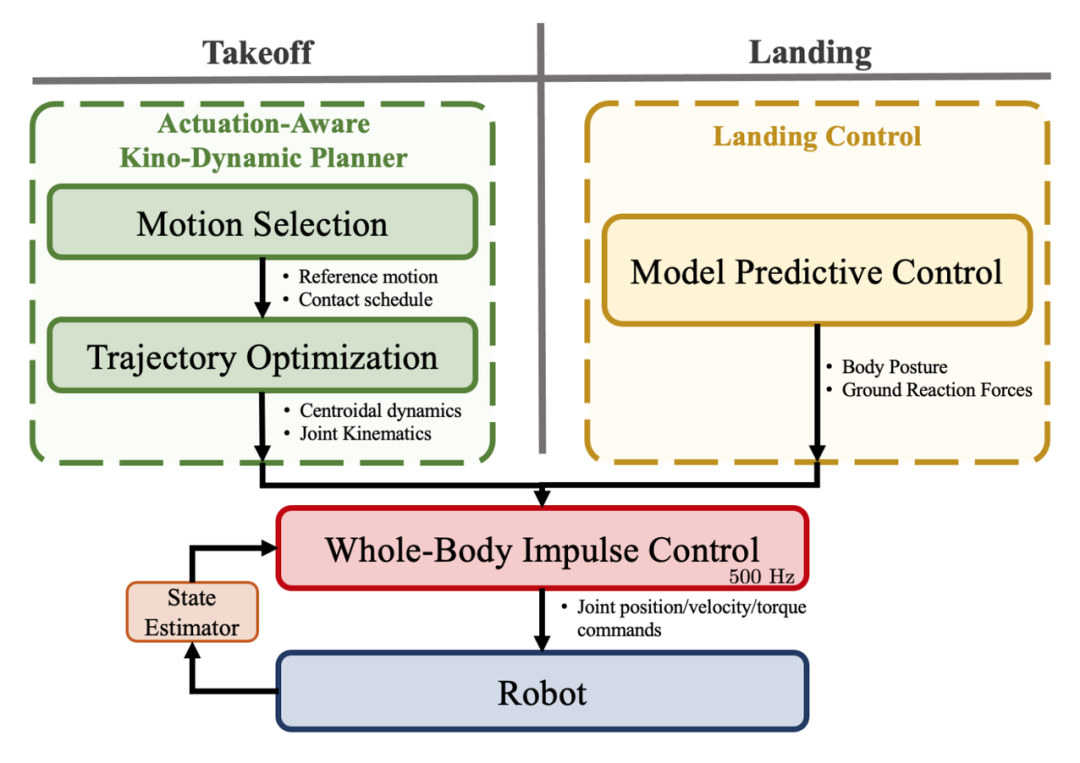 图|规划和控制框架
图|规划和控制框架起飞阶段,是通过新研发的驱动感知 Kino 动态规划(AAKD)进行的。AAKD 规划的第一个步骤是运动选择,它基于对地形和任务的评估,为机器人选择必要的运动(例如跳到桌子上、做一个后空翻等)。第二步骤是基于质心动力学的轨迹优化,为机器人找到一条可行的轨迹; 飞行阶段,机器人的关节简单地使用PD控制,由AAKD规划器确定配置; 着陆阶段,是维持机器人运动的稳定性是一个关键,着陆阶段的模型设置是本次研究的重大突破。在以前的工作中,WBIC与MPC共享相同的位置命令。麻省理工学院提出了一种基于简单集总质量模型的预测控制(MPC)和基于瞬时高带宽控制的全身脉冲控制(WBIC)相结合的递阶控制框架,WBIC将MPC中找到的最优运动作为位置参考,并结合反作用力指令来充分利用最优解。此外,只要不违反身体定向命令,WBIC将身体定向任务优先于质心动量任务,以跟踪所需的质心角动量。通过这种精心设计,仿真机器人在动态空中运动后可以在地面稳定着陆。
一旦机器人检测到与地面完全接触,着陆控制器就会启动,并适当吸收冲击力和耗散动能来开始稳定机器人的平衡。这就需要高带宽的反馈控制(WBIC),能够在着陆运动中实现最佳运动。二次规划(QP)的 MPC 规划反作用力分布,使机器人稳定降落至地面。在起飞和着陆阶段,规划的运动都是通过全身脉冲控制器来实现的。

或许,人与机器人“共舞”的那一天就要到来了。
参考资料:
https://spectrum.ieee.org/automaton/robotics/humanoids/mit-dynamic-acrobatic-humanoid-robot
https://arxiv.org/pdf/2104.09025.pdf
https://spectrum.ieee.org/automaton/robotics/humanoids/ihmc-developing-new-gymnastinspired-humanoid-robot
https://spectrum.ieee.org/automaton/robotics/humanoids/darpa-robotics-challenge-

评论