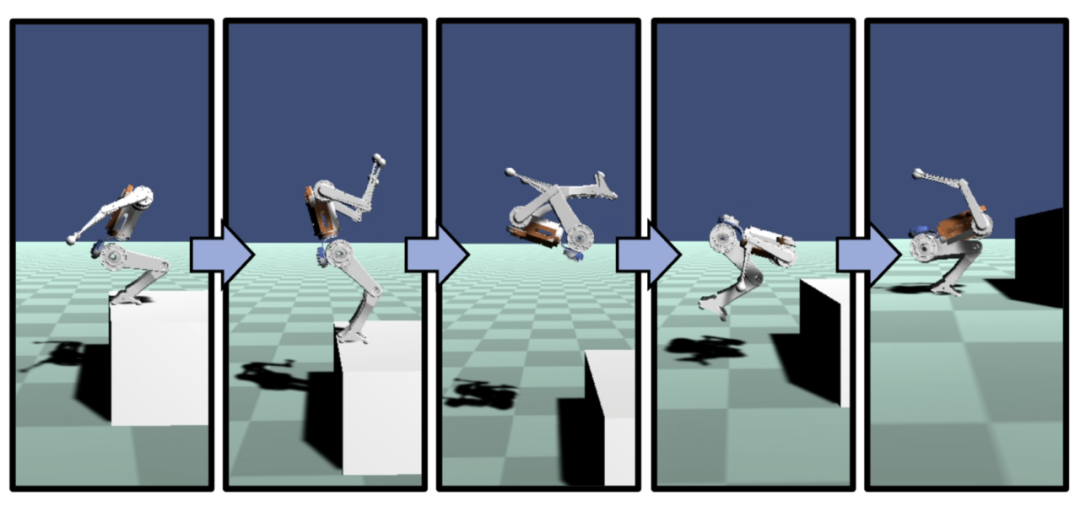
MIT类人机器人开始耍杂技了,看这个后空翻它漂亮吗?

来源:机器之心 本文约1500字,建议阅读5分钟 最近,各式机器人可以说是十分火热了,机器人选手也可以后空翻了。


论文链接:
https://arxiv.org/pdf/2104.09025.pdf
参考链接:
https://techxplore.com/news/2021-05-mit-humanoid-robot-dynamic-robotic.html
编辑:王菁
校对:龚力
评论
 下载APP
下载APP来源:机器之心 本文约1500字,建议阅读5分钟 最近,各式机器人可以说是十分火热了,机器人选手也可以后空翻了。
论文链接:
https://arxiv.org/pdf/2104.09025.pdf
参考链接:
https://techxplore.com/news/2021-05-mit-humanoid-robot-dynamic-robotic.html
编辑:王菁
校对:龚力