
ROS—基于python3实现opencv图像处理任务
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
网上所有的资料都是基于catkin工具进行的,而且在编译时会发现只支持opencv3,不支持opencv4,所以无法使用。
博主这里使用catkin_make工具成功编译python3的cv_bridge,这篇博客应该是全网唯一一个用catkin_make工具编译cv_bridge而且最终运行成功的博客了,也希望能帮到各位小伙伴开发ROS python3+opencv4的项目!
0.软件环境
Ubuntu18.04
python3.6.9
ROS Melodic
Jetson系列基础环境配置:Jetson系列——Ubuntu18.04版本基础配置(换源、ROS、远程桌面、开机自连WIFi、SD卡备份):
https://blog.csdn.net/qq_45779334/article/details/108611797
树莓派环境配置:树莓派4B——Ubuntu 18.04.05安装和基础配置教程(包括WIFI和远程桌面配置、ROS和主从机控制):
https://blog.csdn.net/qq_45779334/article/details/108969323
虚拟机环境配置:Ubuntu——双系统Ubuntu18.04系统安装和基础配置并安装ROS:
https://blog.csdn.net/qq_45779334/article/details/113815018
1.编译python3的cv_bridge
在ROS中想使用python3,最重要的就是需要重新编译基于python3的cv_bridge,只有我们在编译完成后,才能基于python3的cv_bridge完成图像相关节点的使用,所以编译cv_bridge便是最基础和最重要的一步,该博客详细介绍了完整的编译过程,按步骤进行操作即可成功。
ROS——基于Ubuntu18.04和ROS Melodic编译python3的cv_bridge:
https://blog.csdn.net/qq_45779334/article/details/119641789
在编译好cv_bridge后,我们就可以进行测试基于python3的图像处理节点啦!
2.创建基于python3的图像ROS节点
(1)初始化py3_test_ws工作空间
mkdir py3_test_ws && cd py3_test_wsmkdir src && cd srccatkin_init_workspace
(2)创建功能包
catkin_create_pkg py3_demo rospy rosmsg roscpp(3)编写python3的图像发布和接收节点
cd py3_demo && mkdir scriptscd scripts && touch camera.py img_process.pychmod +x camera.pychmod +x img_process.py
将以下两个节点代码分别粘进对应的文件中:
摄像头发布节点
camera.py
#!/usr/bin/env python3import cv2import numpy as npimport rospyfrom std_msgs.msg import Headerfrom sensor_msgs.msg import Imagefrom cv_bridge import CvBridge , CvBridgeErrorimport timeif __name__=="__main__":import sysprint(sys.version) # 查看python版本capture = cv2.VideoCapture(0) # 定义摄像头rospy.init_node('camera_node', anonymous=True) #定义节点image_pub=rospy.Publisher('/image_view/image_raw', Image, queue_size = 1) #定义话题header = Header(stamp = rospy.Time.now())header.frame_id = "Camera"ros_frame = Image()ros_frame.header=headerros_frame.width = 640ros_frame.height = 480ros_frame.encoding = "bgr8"# ros_frame.step = 1920while not rospy.is_shutdown(): # Ctrl C正常退出,如果异常退出会报错device busy!start = time.time()ret, frame = capture.read()if ret: # 如果有画面再执行frame = cv2.flip(frame,1) #水平镜像操作ros_frame.data = np.array(frame).tostring() #图片格式转换image_pub.publish(ros_frame) #发布消息end = time.time()print("cost time:", end-start ) # 看一下每一帧的执行时间,从而确定合适的raterate = rospy.Rate(25) # 10hzcapture.release()cv2.destroyAllWindows()print("quit successfully!")
摄像头接收处理节点
img_process.py
#!/usr/bin/env python3import rospyimport numpy as npfrom sensor_msgs.msg import Imagefrom cv_bridge import CvBridge, CvBridgeErrorimport cv2def callback(data):cv_img = bridge.imgmsg_to_cv2(data, "bgr8")cv2.imshow("frame" , cv_img)cv2.waitKey(1)if __name__ == '__main__':import sysprint(sys.version) # 查看python版本rospy.init_node('img_process_node', anonymous=True)bridge = CvBridge()rospy.Subscriber('/image_view/image_raw', Image, callback)rospy.spin()
3.运行节点
(1)编译
cd ../../..catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
(2)将工作空间添加进环境变量
sudo vim ~/.bashrcsource /home/nano/workspace/py3_test_ws/devel/setup.bash
(3)运行节点
roscorerosrun py3_demo camera.pyrosrun py3_demo img_process.py
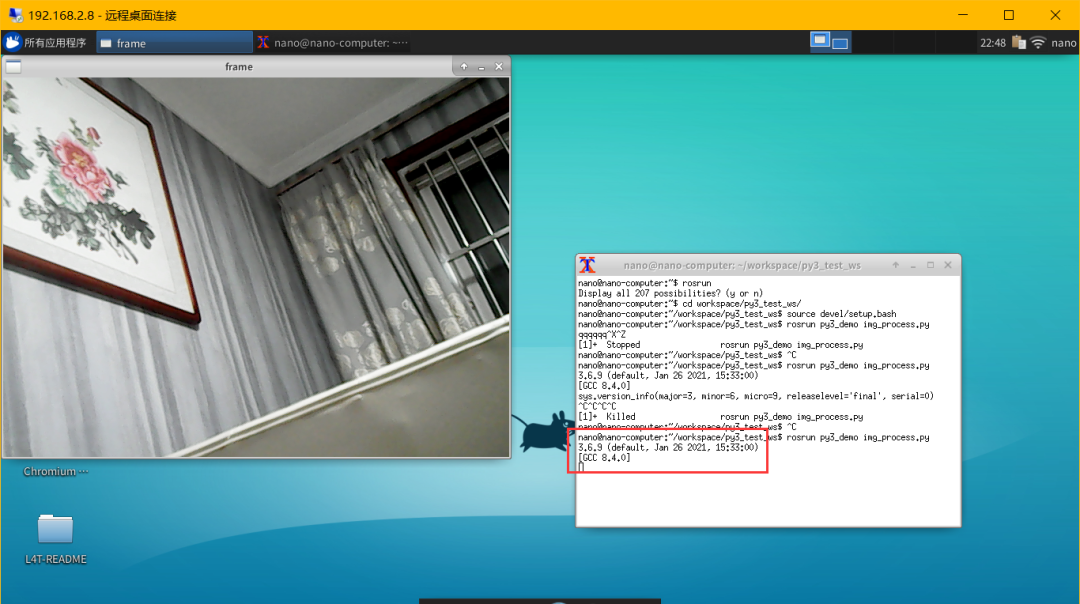
运行效果图
可以看到,打印出的python版本为3.6.9:
在这之后就可以使用python3进行图像处理、深度学习等任务节点的开发啦,如果你也成功跑通了该项目,给博主点个赞支持下吧,嘻嘻~
4.与C++图像处理节点混合使用
ROS——C++与Python3的图像节点基于OpenCV相互发送和接收
https://blog.csdn.net/qq_45779334/article/details/124323809
来源:古月居
本文仅做学术分享,如有侵权,请联系删文。