
哈工大团队打造“六边形战士”,微纳操控机器人中的“全能选手”!
大数据文摘转载自机器人大讲堂
随着探索微观世界步伐的不断加快,操作对象的尺寸从细胞水平缩小到了分子、原子水平,操作任务也从观测升级到了改造。在这一过程中,微纳操控机器人发挥着极其重要的作用,其主流驱动方式包括电磁、静电、电热、压电等。尽管有为数众多的研究成果或商业产品不断涌现,但是它们均面临一个严峻的挑战——无法实现高精度、大行程、强承载和多自由度在单一机器人上的兼顾。这意味着必须设计完全不同的机器人来满足各种各样的应用需求,极大地增加了研制成本,也限制了微纳操控机器人的应用范围。
针对该项难题,哈尔滨工业大学机器人技术与系统国家重点实验室的刘英想教授团队在Wiley旗下期刊Advanced Intelligent Systems上发表了题为《面向高性能微纳操控的仿生多足压电机器人设计思想》(Bioinspired Multilegged Piezoelectric Robot: The Design PhilosophyAiming at High-Performance Micromanipulation)的学术论文,提出了一种全新的微纳操控机器人设计理念,以一种通用且有效的方式实现了多种性能指标在单一压电机器人上的兼顾,打造出了微纳操控机器人中的“全能选手”。
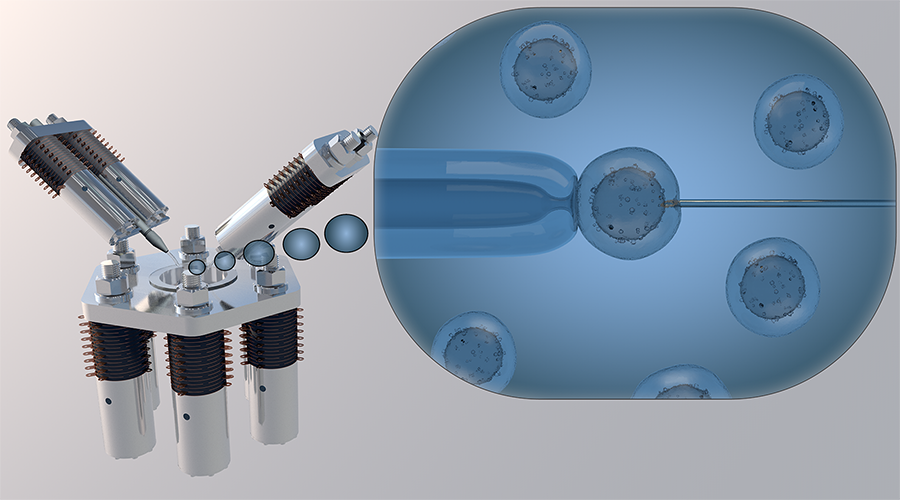
图2 | 微纳操控机器人在细胞手术中的应用
在该项研究工作中,研究人员受自然界中多足动物具备极佳的环境适应性启发,根据它们的身体构造和运动模式,提炼总结出“运动功能模块”、“多单元协同作业”和“多模式融合”三个本质特征,并以此为基础提出了一种面向多维跨尺度操控的压电机器人的设计理念。具体而言,模仿多足动物强壮而敏捷的腿设计了具备多自由度运动能力的压电精密驱动腿,模仿多足动物多腿配合的运动方式将多个驱动腿以特定的拓扑结构组合来实现各种自由度的运动需求,模仿多足动物的多种运动模式规划了摆动、滑移、行走三种运动步态,在不同的运动阶段使用相匹配的步态来实现多种性能指标的兼顾。

图3 | 自然界中的多足动物:设计理念的灵感来源
为了以实验的方式验证该设计理念的有效性和正确性,研究人员设计了一种压电精密驱动腿,并组装成一个六足压电机器人,对其进行性能测试。实验结果表明,与现有的研究成果或商业产品相比,该机器人在精度、行程、承载、速度、尺寸和自由度等方面的综合性能具有显著的优势和进步,堪称微纳操控机器人中的“六边形战士”。
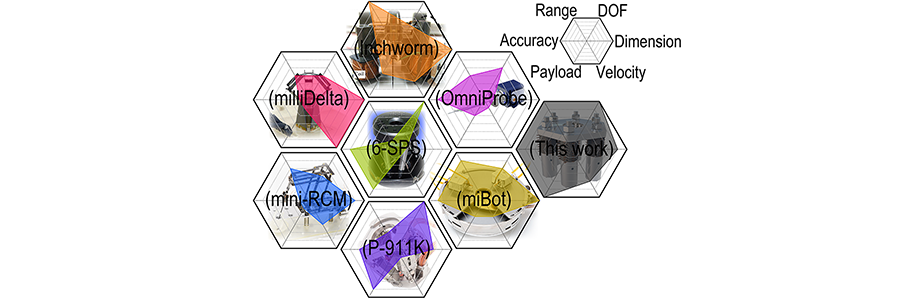
图4 | 六足压电机器人与已有研究成果或商业产品的性能对比
功能模块设计
与多足动物敏捷而强壮的腿足相似,研究人员设计了一种三自由度压电精密驱动腿,作为压电机器人的基础功能模块。该压电精密驱动腿包含一组压电伸缩叠堆和一组压电弯曲叠堆,在激励电压的作用下其末端可以输出三自由度的精密运动。通过调整激励信号,能够合成空间中任意运动轨迹,来实现对压电机器人整体的驱动效果。
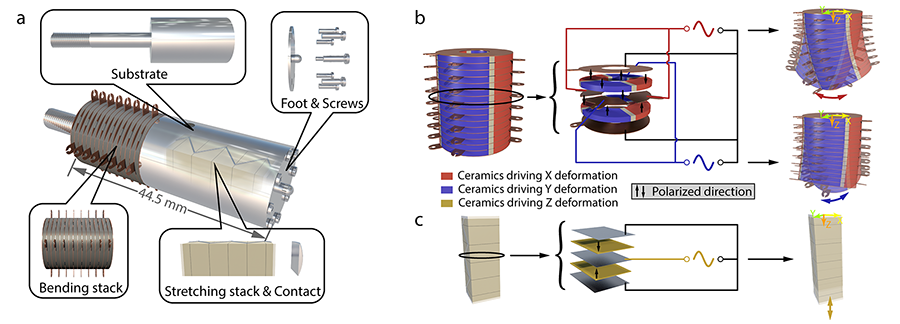
图5 | 压电精密驱动腿的结构设计
图6 | 压电精密驱动腿的三自由度变形
图7 | 压电精密驱动腿的空间轨迹合成运动
多单元协同作业
虽然压电驱动腿具备三自由度精密运动的能力,但是它的运动行程过小,且运动形式单一。为了实现多种性能指标在单一机器人上的兼顾,研究人员模仿多足动物的身体构造,将六个相同的压电驱动腿按照特定的拓扑结构组合形成了一个六足压电机器人,调整六个驱动腿的轨迹与时序相互配合就可以使压电机器人以不同的方式实现运动输出。
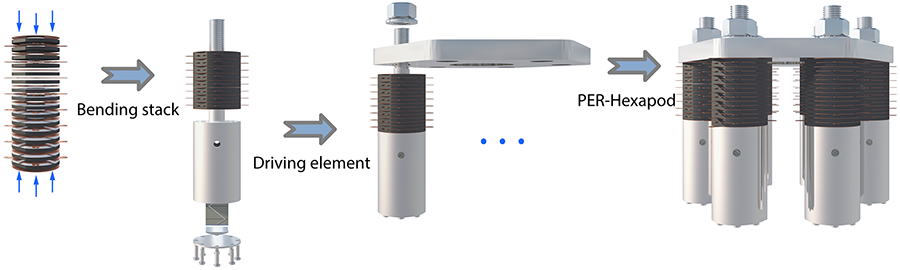
图8 | 六足压电机器人的装配流程
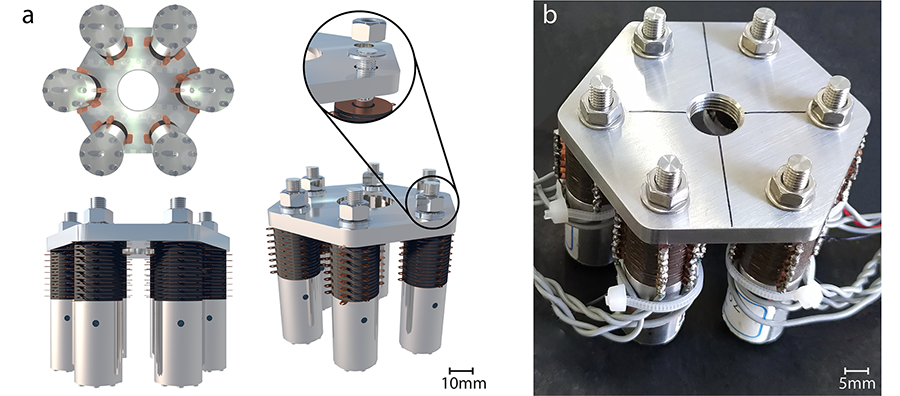
图9 | 六足压电机器人的三维结构与实物照片
多模式融合驱动
自然界的多足动物采用多样化的步态来适应不同的环境需求,研究人员也为六足压电机器人设计了摆动、滑移、行走三种运动步态来适应各种变化的应用条件。其中,摆动步态用于在小范围内输出超高精度的运动,这种步态具有空间中六个自由度,尽管其运动行程只能达到几十微米或几百微弧度的量级,但是其运动分辨力高达4nm或0.2μrad,即便是开环条件下的重复性精度也优于0.1μm或7μrad。为了实现更大的运动行程,基于步进累积原理的滑移步态可以将平面内三自由度的运动行程扩展至无限,而且这种步态的激励方法十分简单,最大运动速度可达1.89mm/s,适用于轻载大行程的应用需求。而在需要强大承载能力的应用中,行走步态便可以大显身手,这种步态同样可以实现平面内三自由度的无限行程,不过最令人瞩目的还是其强大的承载能力——当负载从零变化至10kg时,其速度波动最大不超过10%。这也就意味着该机器人凭借自身0.45kg的重量,可以稳定驱动超过22倍自重的负载。
图10 | 六足压电机器人摆动步态的运动原理
图11 | 六足压电机器人滑移步态的运动原理
图12 | 六足压电机器人行走步态的运动原理
这三种步态在结构上协调统一,在运动输出区间上优势互补。因此,将它们集成到同一机器人上并在特定的条件下使用相匹配的步态,就可以实现多种性能指标在单一机器人上的兼顾。具体而言,当机器人的实际位置距离目标位置较远时使用滑移步态或行走步态逐步靠近目标位置,当位置误差减小后则切换到摆动步态来进一步提高定位精度。在轻载条件下,可以使用滑移步态与摆动步态的组合来简化激励方法;在重载条件下则使用行走步态与摆动步态的组合来追求更加稳定的运动输出。实验结果表明,通过这三种运动步态的实时切换,六足压电机器人可以在毫米级的范围内实现5nm的闭环定位精度,具备了在不同载荷下实现多维跨尺度运动输出的能力。
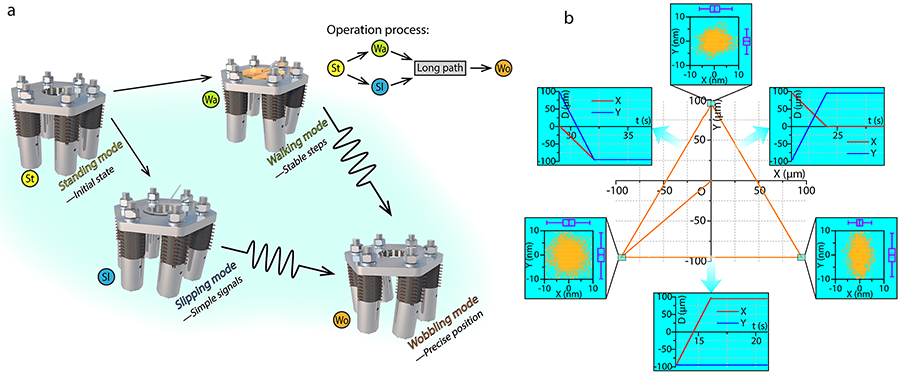
图13 | 多模式融合控制策略与闭环运动实验结果
应用拓展与发展前景
凭借优异的多维跨尺度运动能力,研究人员还尝试以视觉控制的方式将该机器人应用于多细胞的批量自动化操作中,实现了虾卵细胞和神经细胞在显微操作针下的精准定位,取得了令人满意的实验效果。借助于原子力显微镜等工具,该机器人还可以应用于超精密加工中以实现微观结构的塑造。除此之外,研究人员还指出,尽管在此研究工作中,六足压电机器人是进行实验研究的主要对象,但是这并不意味着所提出的设计思想只适用于该类型的压电机器人。恰恰相反,这种设计思想具有极好的普适应和迁移性,将压电驱动腿进行并按照所需要的拓扑结构组合,就能够以简单便捷的方式构建出具有不同功能的微纳操控压电机器人。凭借这种设计理念,甚至有可能研制成一系列的微纳操控机器人家族,进而构成一整套集定位、观测、操作于一体的微纳操控系统,来满足各种高性能的微纳操控需求。
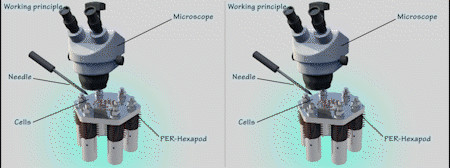
图14 | 压电机器人应用于虾卵细胞和神经细胞的精准定位与操作
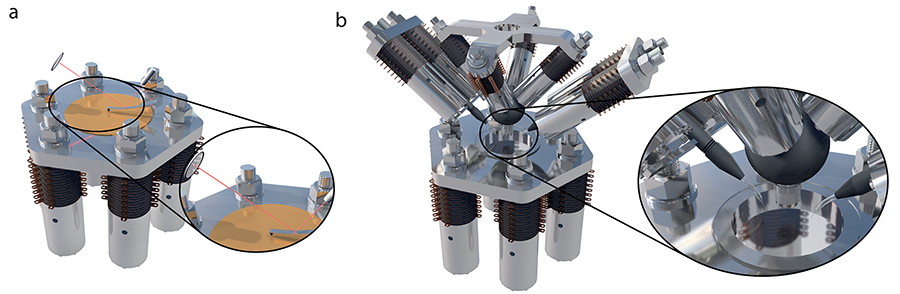
图15 | 压电机器人应用于超精密加工和微纳操控系统
研究人员表示,这项研究工作中所提出的设计思想不仅仅丰富了微纳操控机器人的设计理论,可以为微纳操控领域的研究起到一定的参考和启发作用,而且还能将实际应用中的微纳操控效率进一步提高,助推生命科学、材料科学、微纳制造等领域的发展。
