
YOLOv6:最新目标检测框架开源
关注涛涛CV,设置星标,更新不错过
1. 概述
YOLOv6是一种专用于工业应用的单级目标检测框架,具有硬件友好的高效设计和高性能。
YOLOv6-s在COCO val2017数据集上实现了35.0的mAP,在T4上使用TensorRT FP16进行bs32推断,达到了1242 FPS,在COCO val2017数据集上实现了43.1的mAP,在T4上使用TensorRT FP16进行bs32推断,达到了520 FPS。在部署方面,YOLOv6 支持 GPU(TensorRT)、CPU(OPENVINO)、ARM(MNN、TNN、NCNN)等不同平台的部署,极大地简化工程部署时的适配工作。
YOLOv6开源至Github,网址:https://github.com/meituan/YOLOv6
精度与速度远超 YOLOv5 和 YOLOX 的新框架
目标检测作为计算机视觉领域的一项基础性技术,在工业界得到了广泛的应用,其中 YOLO 系列算法因其较好的综合性能,逐渐成为大多数工业应用时的首选框架。至今,业界已衍生出许多 YOLO 检测框架,其中以 YOLOv5[1]、YOLOX[2] 和 PP-YOLOE[3] 最具代表性,但在实际使用中,我们发现上述框架在速度和精度方面仍有很大的提升的空间。基于此,我们通过研究并借鉴了业界已有的先进技术,开发了一套新的目标检测框架——YOLOv6。该框架支持模型训练、推理及多平台部署等全链条的工业应用需求,并在网络结构、训练策略等算法层面进行了多项改进和优化,在 COCO 数据集上,YOLOv6 在精度和速度方面均超越其他同体量算法,相关结果如下图 1 所示:

图1-1 YOLOv6 各尺寸模型与其他模型性能对比

图1-2 YOLOv6 与其他模型在不同分辨率下性能对比
图 1-1 展示了不同尺寸网络下各检测算法的性能对比,曲线上的点分别表示该检测算法在不同尺寸网络下(s/tiny/nano)的模型性能,从图中可以看到,YOLOv6 在精度和速度方面均超越其他 YOLO 系列同体量算法。
图 1-2 展示了输入分辨率变化时各检测网络模型的性能对比,曲线上的点从左往右分别表示图像分辨率依次增大时(384/448/512/576/640)该模型的性能,从图中可以看到,YOLOv6 在不同分辨率下,仍然保持较大的性能优势。
2. YOLOv6关键技术介绍
YOLOv6 主要在 BackBone、Neck、Head 以及训练策略等方面进行了诸多的改进:
我们统一设计了更高效的 Backbone 和 Neck :受到硬件感知神经网络设计思想的启发,基于 RepVGG style[4] 设计了可重参数化、更高效的骨干网络 EfficientRep Backbone 和 Rep-PAN Neck。
优化设计了更简洁有效的 Efficient Decoupled Head,在维持精度的同时,进一步降低了一般解耦头带来的额外延时开销。
在训练策略上,我们采用Anchor-free 无锚范式,同时辅以 SimOTA[2] 标签分配策略以及 SIoU[9] 边界框回归损失来进一步提高检测精度。
3. 实验结果
经过以上优化策略和改进,YOLOv6 在多个不同尺寸下的模型均取得了卓越的表现。下表 1 展示了 YOLOv6-nano 的消融实验结果,从实验结果可以看出,我们自主设计的检测网络在精度和速度上都带来了很大的增益。

表1 YOLOv6-nano 消融实验结果
下表 2 展示了 YOLOv6 与当前主流的其他 YOLO 系列算法相比较的实验结果。从表格中可以看到:
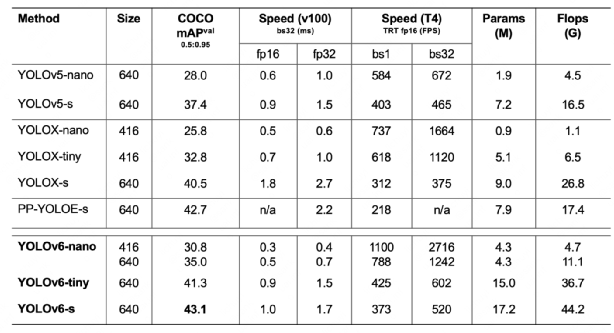
表2 YOLOv6各尺寸模型性能与其他模型的比较
YOLOv6-nano 在 COCO val 上 取得了 35.0% AP 的精度,同时在 T4 上使用 TRT FP16 batchsize=32 进行推理,可达到 1242FPS 的性能,相较于 YOLOv5-nano 精度提升 7% AP,速度提升 85%。
YOLOv6-tiny 在 COCO val 上 取得了 41.3% AP 的精度, 同时在 T4 上使用 TRT FP16 batchsize=32 进行推理,可达到 602FPS 的性能,相较于 YOLOv5-s 精度提升 3.9% AP,速度提升 29.4%。
YOLOv6-s 在 COCO val 上 取得了 43.1% AP 的精度, 同时在 T4 上使用 TRT FP16 batchsize=32 进行推理,可达到 520FPS 的性能,相较于 YOLOX-s 精度提升 2.6% AP,速度提升 38.6%;相较于 PP-YOLOE-s 精度提升 0.4% AP的条件下,在T4上使用 TRT FP16 进行单 batch 推理,速度提升 71.3%。
4. 总结与展望
本文介绍了美团视觉智能部在目标检测框架方面的优化及实践经验,我们针对 YOLO 系列框架,在训练策略、主干网络、多尺度特征融合、检测头等方面进行了思考和优化,设计了新的检测框架-YOLOv6,初衷来自于解决工业应用落地时所遇到的实际问题。
在打造 YOLOv6 框架的同时,我们探索和优化了一些新的方法,例如基于硬件感知神经网络设计思想自研了 EfficientRep Backbone、Rep-Neck 和 Efficient Decoupled Head,同时也吸收借鉴了学术界和工业界的一些前沿进展和成果,例如 Anchor-free、SimOTA 和 SIoU 回归损失。在 COCO 数据集上的实验结果显示,YOLOv6 在检测精度和速度方面都属于佼佼者。
总结:
课程:
《机器视觉:应用讲解》,一总体概述,二相机篇,三镜头篇,四光源篇,五光学系统选型,六视觉开发软件,七相机标定技术,八项目案例解析,九视觉公司分析,十产业发展情况
笔记:
《智能革命》《人工智能》《AI•未来》《好好赚钱》《韭菜的自我修养》读书笔记
行业:
服务机器人公司,机器视觉公司,自动驾驶公司,ADAS公司总结, 防疫机器人发展,腾讯未来交通
SLAM:
Vslam方案+源码,语义SLAM与深度相机,SLAM和导航避障,视觉SLAM总结
秦学英《三维物体的识别与跟踪》,章国锋《视觉SLAM》,申抒含《基于图像的三维建模》,姜翰青《RGB -D SLAM》记录笔记
机器视觉:
毫米波雷达,雷达视觉融合,2021视觉研讨会,2020上海研讨会,双目和激光的三维重建,2021视觉市场研究,太阳能行业应用
机器视觉基本概念笔记,记录五,记录四,记录三,记录二,记录一
图像处理:
图像处理基本概念笔记,记录八,记录七,记录六 ,记录五,记录四 ,记录三,记录二 ,记录二,记录一
欢迎支持,点击在看,分享