
小目标检测:Feature Extraction

极市导读
本文介绍了一篇BMCV的文章,该方法是网络上的改进,通过消除Stride操作增大feature map来提升小目标检测性能,以及小目标和大目标的具有单独路径的双路径权重共享方案。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
前面我们介绍了使用数据扩增的方式提高小目标检测的性能,这种方法虽然会提升小目标检测的性能,但也会影响大目标检测的性能。
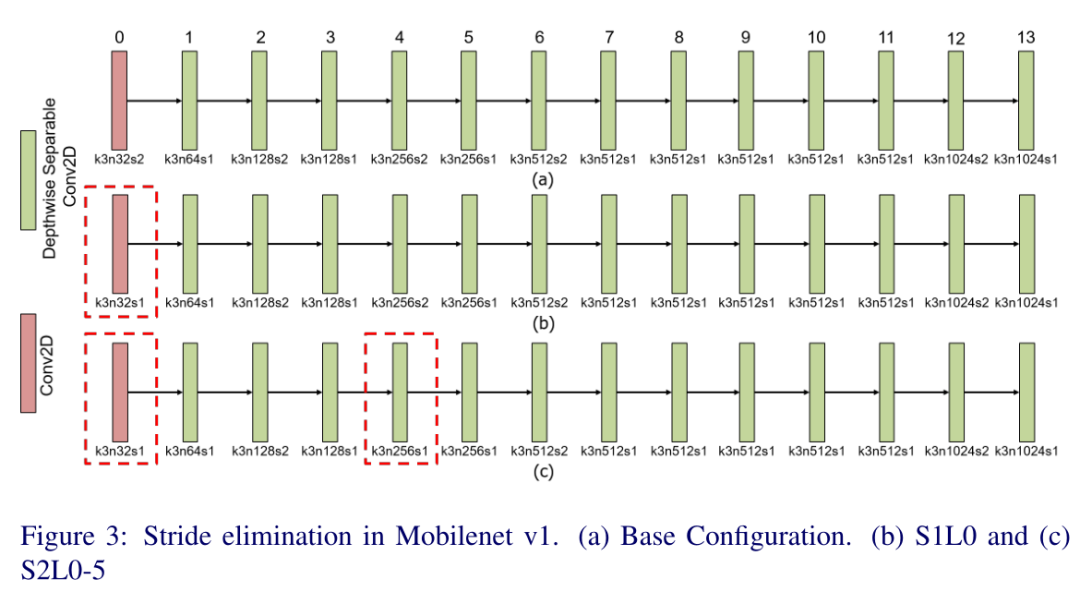
今天我们介绍一篇BMCV的文章,该方法是网络上的改进,通过消除Stride操作增大feature map来提升小目标检测性能,以及小目标和大目标的具有单独路径的双路径权重共享方案。
01 Analysis

02 Proposed Approach

03 Experimental Results

04 总结
推荐阅读
评论