
图像语义分割入门:FCN/U-Net网络解析
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
图像语义分割(Semantic Segmentation)是图像处理和是机器视觉技术中关于图像理解的重要一环,也是 AI 领域中一个重要的分支。语义分割即是对图像中每一个像素点进行分类,确定每个点的类别(如属于背景、人或车等),从而进行区域划分。目前,语义分割已经被广泛应用于自动驾驶、无人机落点判定等场景中。

图1 自动驾驶中的图像语义分割
而截止目前,CNN已经在图像分类分方面取得了巨大的成就,涌现出如VGG和Resnet等网络结构,并在ImageNet中取得了好成绩。CNN的强大之处在于它的多层结构能自动学习特征,并且可以学习到多个层次的特征:
1.较浅的卷积层感知域较小,学习到一些局部区域的特征;
2.较深的卷积层具有较大的感知域,能够学习到更加抽象一些的特征。
这些抽象特征对物体的大小、位置和方向等敏感性更低,从而有助于分类性能的提高。这些抽象的特征对分类很有帮助,可以很好地判断出一幅图像中包含什么类别的物体。图像分类是图像级别的!
图2 图像分类
与分类不同的是,语义分割需要判断图像每个像素点的类别,进行精确分割。图像语义分割是像素级别的!但是由于CNN在进行convolution和pooling过程中丢失了图像细节,即feature map size逐渐变小,所以不能很好地指出物体的具体轮廓、指出每个像素具体属于哪个物体,无法做到精确的分割。
针对这个问题,Jonathan Long等人提出了Fully Convolutional Networks(FCN)用于图像语义分割。自从提出后,FCN已经成为语义分割的基本框架,后续算法其实都是在这个框架中改进而来。
FCN论文地址:FCN paper
https://arxiv.org/abs/1411.4038
FCN原作代码:FCN github
https://github.com/shelhamer/fcn.berkeleyvision.org
1 FCN改变了什么?
对于一般的分类CNN网络,如VGG和Resnet,都会在网络的最后加入一些全连接层,经过softmax后就可以获得类别概率信息。但是这个概率信息是1维的,即只能标识整个图片的类别,不能标识每个像素点的类别,所以这种全连接方法不适用于图像分割。
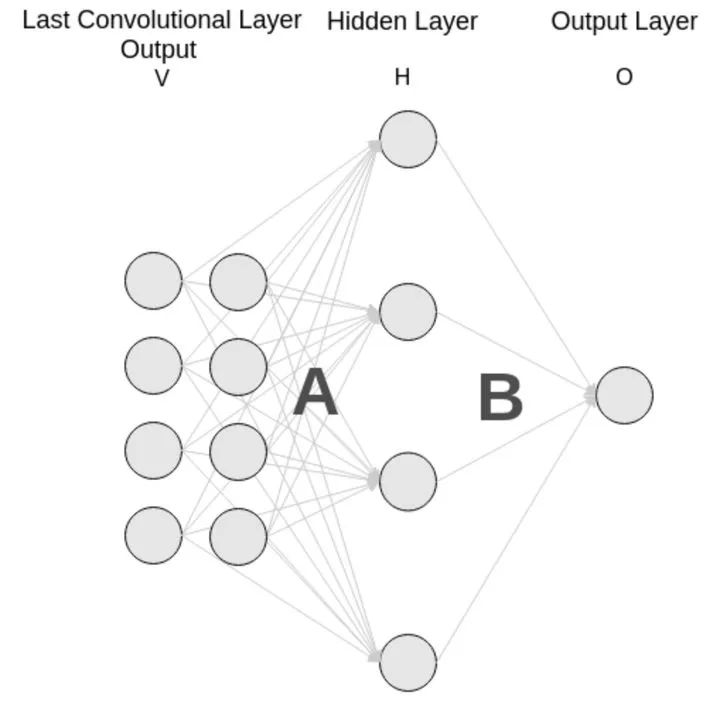
图3 全连接层
而FCN提出可以把后面几个全连接都换成卷积,这样就可以获得一张2维的feature map,后接softmax获得每个像素点的分类信息,从而解决了分割问题,如图4。
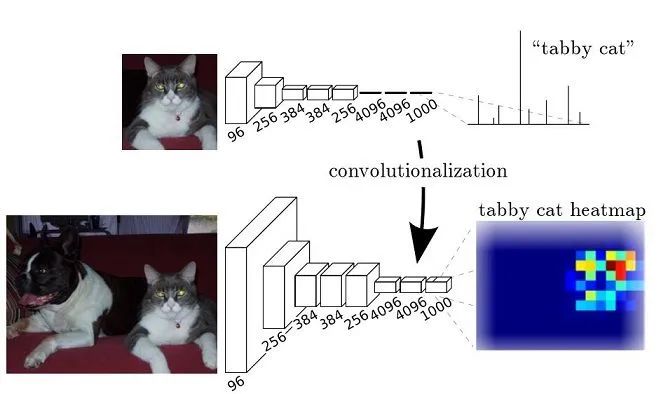
图4
2 FCN结构
整个FCN网络基本原理如图5(只是原理示意图):
1.image经过多个conv和+一个max pooling变为pool1 feature,宽高变为1/2
2.pool1 feature再经过多个conv+一个max pooling变为pool2 feature,宽高变为1/4
3.pool2 feature再经过多个conv+一个max pooling变为pool3 feature,宽高变为1/8
4. ......
5.直到pool5 feature,宽高变为1/32。
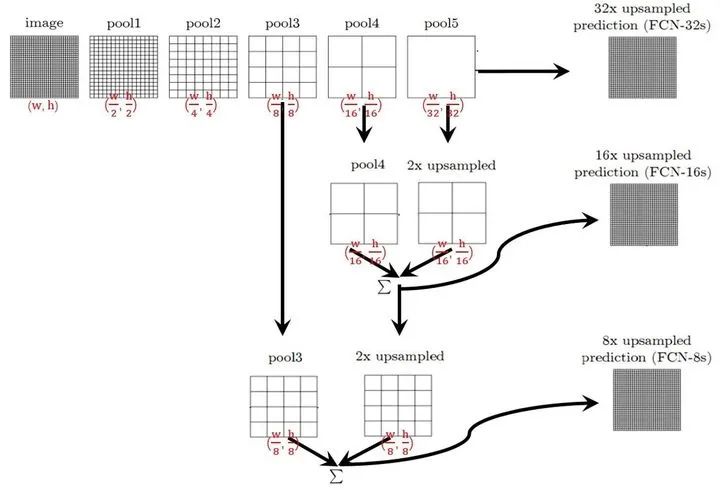
图5 FCN网络结构示意图
那么:
1. 对于FCN-32s,直接对pool5 feature进行32倍上采样获得32x upsampled feature,再对32x upsampled feature每个点做softmax prediction获得32x upsampled feature prediction(即分割图)。
2. 对于FCN-16s,首先对pool5 feature进行2倍上采样获得2x upsampled feature,再把pool4 feature和2x upsampled feature逐点相加,然后对相加的feature进行16倍上采样,并softmax prediction,获得16x upsampled feature prediction。
3. 对于FCN-8s,首先进行pool4+2x upsampled feature逐点相加,然后又进行pool3+2x upsampled逐点相加,即进行更多次特征融合。具体过程与16s类似,不再赘述。
作者在原文种给出3种网络结果对比,明显可以看出效果:FCN-32s < FCN-16s < FCN-8s,即使用多层feature融合有利于提高分割准确性。
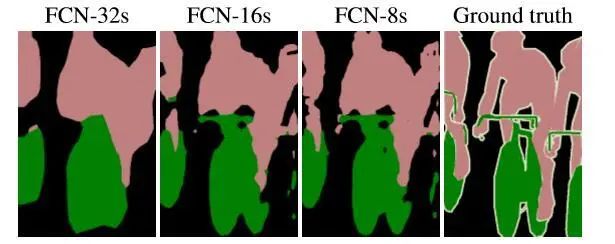
图6
3 什么是上采样?
说了半天,到底什么是上采样?
实际上,上采样(upsampling)一般包括2种方式:
1. Resize,如双线性插值直接缩放,类似于图像缩放(这种方法在原文中提到)
2. Deconvolution,也叫Transposed Convolution
什么是Resize就不多说了,这里解释一下Deconvolution。
对于一般卷积,输入蓝色4x4矩阵,卷积核大小3x3。当设置卷积参数pad=0,stride=1时,卷积输出绿色2x2矩阵,如图6。
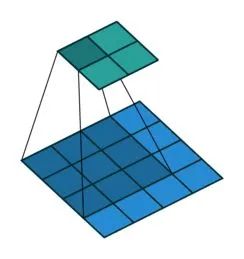
图6 Convolution forward示意图
而对于反卷积,相当于把普通卷积反过来,输入蓝色2x2矩阵,卷积核大小还是3x3。当设置反卷积参数pad=0,stride=1时输出绿色4x4矩阵,如图7,这相当于完全将图4倒过来(其他更多卷积示意图点这里)。
https://github.com/vdumoulin/conv_arithmetic
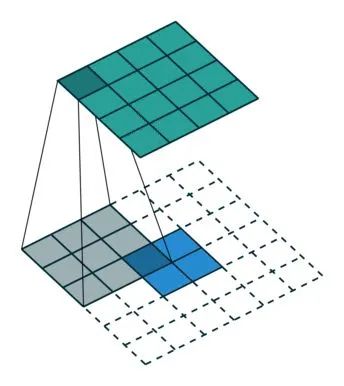
图7 Deconvolution forward示意图
传统的网络是subsampling的,对应的输出尺寸会降低;upsampling的意义在于将小尺寸的高维度feature map恢复回去,以便做pixelwise prediction,获得每个点的分类信息。
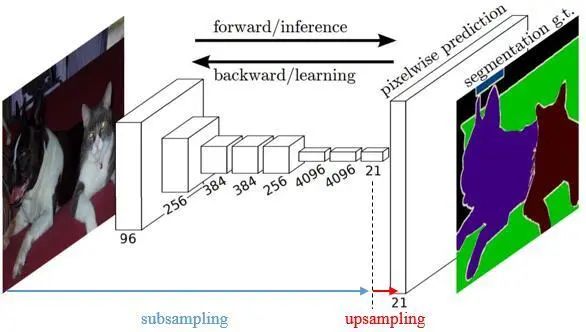
图8 Subsampling vs Upsampling
上采样在FCN网络中的作用如图8,明显可以看到经过上采样后恢复了较大的pixelwise feature map(其中最后一个层21-dim是因为PACSAL数据集有20个类别+Background)。这其实相当于一个Encode-Decode的过程。
具体的FCN网络结构,可以在fcn caffe prototext (https://github.com/shelhamer/fcn.berkeleyvision.org/blob/master/pascalcontext-fcn8s/train.prototxt )中查到,建议使用Netscope查看网络结构。这里解释里面的难点:
为了解决图像过小后 1/32 下采样后输出feature map太小情况,FCN原作者在第一个卷积层conv1_1加入pad=100。
layer {
name: "conv1_1"
type: "Convolution"
bottom: "data"
top: "conv1_1"
param {
lr_mult: 1
decay_mult: 1
}
param {
lr_mult: 2
decay_mult: 0
}
convolution_param {
num_output: 64
pad: 100 # pad=100
kernel_size: 3
stride: 1
}
}考虑如果不在conv1_1加入pad=100,会发生什么?
假设输入图像高度为h。由于VGG中缩小输出feature map只在pooling层,经过每个pooling后输出高度变为:
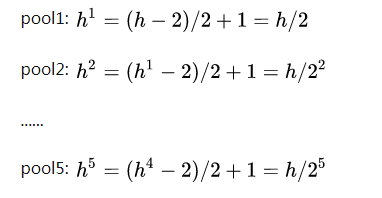

很明显,feature map的尺寸缩小了32倍,接下来是fc6卷积层:
layer {
name: "fc6"
type: "Convolution"
bottom: "pool5"
top: "fc6"
param {
lr_mult: 1
decay_mult: 1
}
param {
lr_mult: 2
decay_mult: 0
}
convolution_param {
num_output: 4096
pad: 0
kernel_size: 7
stride: 1
}
}
如果不在conv1_1加入pad=100,那么对于小于192x192的输入图像,在反卷积恢复尺寸前已经feature map size = 0!所以在conv1_1添加pad=100的方法,解决输入图像大小的问题(但是实际也引入很大的噪声)。
●由于FCN在conv1_1加入pad=100,同时fc6卷积层也会改变feature map尺寸,那么真实的网络就不可能像原理图3那样“完美1/2”。
那么在特征融合的时候,如何保证逐点相加的feature map是一样大的呢?这就要引入crop层了。以fcn-8s score_pool4c为例:
layer {
name: "score_pool4c"
type: "Crop"
bottom: "score_pool4" # 需要裁切的blob
bottom: "upscore2" # 用于指示裁切尺寸的blob,和输出blob一样大
top: "score_pool4c" # 输出blob
crop_param {
axis: 2
offset: 5
}
}在caffe中,存储数据的方式为 blob = [num, channel, height, width],与pytorch一样
1. 而score_pool4c设置了axis=2,相当于从第2维(index start from 0!)往后开始裁剪,即裁剪height和width两个维度,同时不改变num和channel纬度
2. 同时设置crop在height和width纬度的开始点为offset=5
不妨定义:
crop_w = upscore2 blob width
crop_h = upscore2 blob height用Python语法表示,相当于score_pool4c层的输出为:
score_pool4c = score_pool4[:, :, 5:5+crop_h, 5:5+crop_w]刚好相当于从score_pool4中切出upscore2大小!这样就可以进行逐点相加的特征融合了。
4 U-Net
U-Net原作者官网
https://link.zhihu.com/?target=https%3A//lmb.informatik.uni-freiburg.de/Publications/2015/RFB15a/
U-Net是原作者参加ISBI Challenge提出的一种分割网络,能够适应很小的训练集(大约30张图)。U-Net与FCN都是很小的分割网络,既没有使用空洞卷积,也没有后接CRF,结构简单。
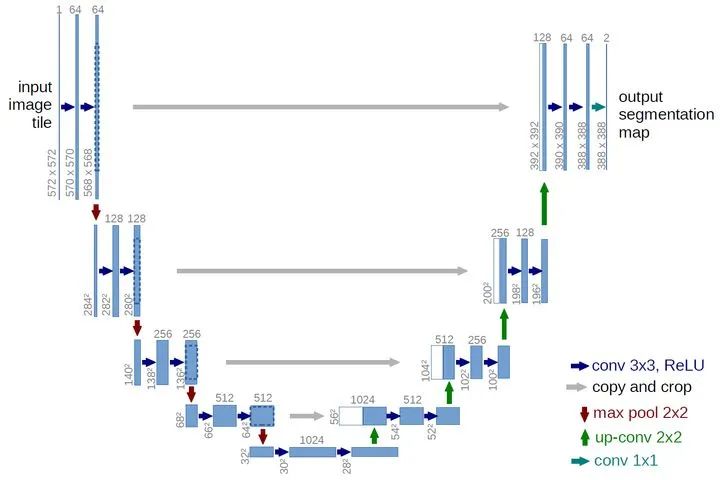
图9 U-Net网络结构图
整个U-Net网络结构如图9,类似于一个大大的U字母:首先进行Conv+Pooling下采样;然后Deconv反卷积进行上采样,crop之前的低层feature map,进行融合;然后再次上采样。重复这个过程,直到获得输出388x388x2的feature map,最后经过softmax获得output segment map。总体来说与FCN思路非常类似。
为何要提起U-Net?是因为U-Net采用了与FCN完全不同的特征融合方式:拼接!
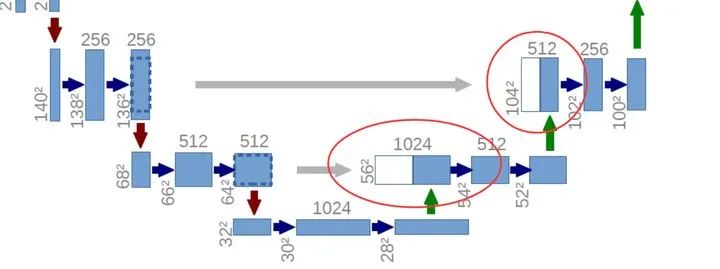
图10 U-Net concat特征融合方式
与FCN逐点相加不同,U-Net采用将特征在channel维度拼接在一起,形成更“厚”的特征。所以:
语义分割网络在特征融合时也有2种办法:
FCN式的逐点相加,对应caffe的EltwiseLayer层,对应tensorflow的tf.add()
U-Net式的channel维度拼接融合,对应caffe的ConcatLayer层,对应tensorflow的tf.concat()
记得划重点哦。
相比其他大型网络,FCN/U-Net还是蛮简单的,就不多废话了。
总结一下,CNN图像语义分割也就基本上是这个套路:
下采样+上采样:Convlution + Deconvlution/Resize
多尺度特征融合:特征逐点相加/特征channel维度拼接
获得像素级别的segement map:对每一个像素点进行判断类别
看,即使是更复杂的DeepLab v3+依然也是这个基本套路(至于DeepLab以后再说)。
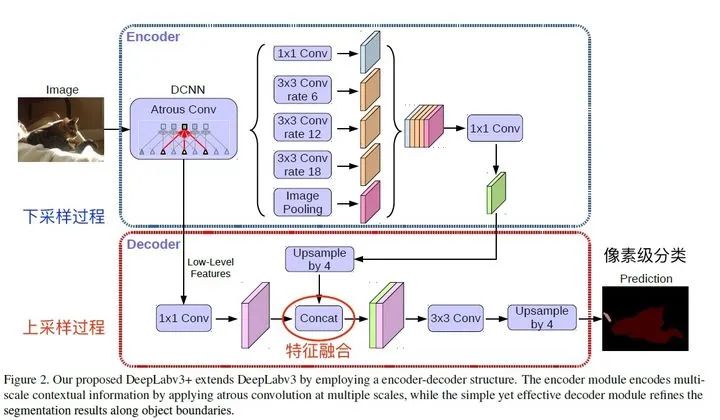
图13 DeepLab v3+
所以作为一篇入门文章,读完后如果可以理解这3个方面,也就可以了;当然CNN图像语义分割也算入门了。
参考链接 https://zhuanlan.zhihu.com/p/22976342
来源:机器学习AI算法工程
本文仅做学术分享,如有侵权,请联系删文。