
深度解读:让你掌握OneFlow框架的系统设计(中篇)
本文是OneFlow系统设计分享系列文章的中篇,主要介绍OneFlow的编译期Compiler如何将Job编译为Plan的。其中最精华的部分是OneFlow的Boxing模块,负责构建两个逻辑上的Op对应的两组物理上的Op在任意情形下的物理子图,完成了分布式训练中各个机器各个设备之间的数据拷贝、切分、传输、通信的子图搭建。值得一提的是,Boxing模块的代码实现是非常直观且易扩展的,使用了设计模式中的责任链模式(Chain of Responsibility),未来我们会结合OneFlow的代码实现分享一些C++编程技巧的文章,以及为什么OneFlow要使用这些编程技巧,解决了哪些问题,敬请期待~
如果你对OneFlow这套致简致快的框架设计感兴趣,或者对深度学习框架、分布式系统感兴趣的话,本文就会让你全面掌握OneFlow的系统设计。相信读完这篇文章,你就会理解我们是如何看待分布式深度学习训练的,我们为什么要这样设计,这样设计的好处是什么,以及我们为什么相信OneFlow这套设计是分布式深度学习训练框架的最优设计。
本篇为系列内容中的中篇,阅读上篇,请点击本次推送第一条。


深度学习框架原理
OneFlow系统架构设计(简略版)
OneFlow完整运行流程与各模块的交互方式
3.1 分布式集群环境初始化
3.2 Python端搭建计算图
3.3 编译期:OneFlow(JobSet) -> MergedPlan
3.4 编译期:Compiler(Job)->Plan
3.5 运行时:Runtime(Plan)
3.4 编译期:Compiler(Job)->Plan
为了方便理解,我们再简要描述一些重要的概念和抽象:
Job:用户定义的逻辑上的计算图,由逻辑上的Op组成。
Plan:编译生成的物理上的计算图,由物理上的Task组成。
Task:运行时Actor的配置描述,一个Actor与一个Task一一对应,Task内部有Op的运行时描述Kernel的配置。Task并不一定关联某个用户计算图Job中的逻辑上的Op,因为并编译期会增加很多物理上的Op用于数据搬运、网络传输、切分/拼接等操作。Task中标记了自己是在哪台机器哪个设备上,并使用哪个线程工作等。Task还需要指定自己产出Regst的regst num、内存类型、所属内存块的偏移量等等信息。
Regst:运行时的数据存储、Actor之间通信的基本单元。存储某个具体的Tensor。
编译期(Compiler)的设计体现了OneFlow作为一个分布式深度学习训练框架的很多重要的设计原则:
1)一致性视角(Consistent View)
OneFlow把整个分布式集群抽象成为一个超级设备,用户使用OneFlow做分布式训练跟做单机单卡的训练没有任何区别。体现在:
编译期Compiler仅在Master机器上编译整个Plan,其他Worker机器等待获取Plan启动运行时即可。Master上编译的Plan就包含了所有机器所有设备上的基础单元——Task(Actor)。
所有的分布式训练过程中各个机器各个设备之间的数据通信、同步操作均被Compiler自动生成,无需用户关心和编写分布式训练中的数据同步。
2)数据搬运是一等公民
OneFlow将所有的数据加载、预处理、拷贝、网络传输、Tensor的自动切分/拼接/广播/求和操作都抽象成了跟计算Op一样的运行时执行体——Actor,即在分布式的物理计算图上显式表示了数据搬运的操作。这样做的好处是OneFlow可以感知到所有的数据搬运、同步操作,因此编译期Compiler可以更好的在整个物理计算图上做全局调度,使得这些数据搬运操作尽可能被计算操作所掩盖,对数据搬运操作的性能优化转而变成了图分析与图优化。
3)编译期全局调度,运行时去中心化调度
OneFlow的运行时是一个极其简单的抽象——Actor,每个Actor仅需要关心和自己相关的上下游Actor的消息就可以知道自己能否工作,这样做的好处是运行时系统不会因为有中心调度节点导致性能瓶颈(在计算图非常大的情况下)。为了做到这一点,OneFlow的调度工作大多都是在编译期完成的,Compiler会做好全局的内存调度、Op执行调度、通信调度等工作,使得运行时的调度开销尽可能的低,从而达到更快的训练速度。
4)天然支持流水线,解决流控问题
编译期Compiler通过推导和设置Task产出Regst的regst num,可以使得运行时相邻Actor之间可以流水并行起来。同时还可以通过背压机制(Back Pressure)解决流控问题(Control Flow)。具体的Actor机制如何解决流水线和流控问题的讨论我放在下篇中介绍。
在原生的OneFlow设计中,Compiler输入是一个Job(用户定义的op list),经过编译生成OneFlow的中间表示IR(Intermediate Representation)——Plan,Plan是一个被Runtime直接读取就能生成运行时执行图的描述。而上面介绍的OneFlow(JobSet)->MergedPlan是为了支持Python前端交互 + 多Job(Train/Eval同时做)而后设计出来的。我们下面介绍OneFlow的Compiler做了哪些事。
3.4.1 JobCompleter().Complete(job)
第一步,经过JobCompleter将Job不断重写。经过多个Pass以生成最终的Job。中间借助OpGraph抽象不断推导新的Job对应的逻辑图。这些Pass包括一些优化如插入KeepHeaderOnly节点;增加Source/Sink的Tick节点使得图成为一个单源节点和单汇节点;增加控制边;计算临界区;以及使用XRT框架重新构建Job。
XRT框架会将Job中的OpGraph进行有选择的合并,并选取使用XLA或者TensorRT来进行编译生成优化后的Kernel。对于OneFlow而言,这些都是XrtLaunchOpConf,其Kernel都是XrtLaunchKernel。OneFlow系统并不关心其实现细节,实际上,经过XRT优化后的Kernel实现都是在其框架内定义的顶层抽象:Executable 中存储的,在XrtLaunchKernel的计算过程中调用executable->Run()去执行。
3.4.2 生成OpGraph
Graph是OneFlow中的一个重要基础抽象,各个重要的图相关的概念(OpGraph、LogicalGraph、TaskGraph、ChainGraph、ExecGraph...)都继承自Graph。Graph表示一个图,里面保存着这个图中的所有的节点Node和节点之间的连边Edge。Graph上面提供一系列共用的遍历方法(普通遍历、拓扑遍历、BFS、DFS...),以及图改写(插入、删除 节点/边)图查询方法。
其实在第一阶段JobCompleter在修改Job的过程中就需要多次Build OpGraph,在最终版本的Job生成以后,我们还需要在全局创建一个OpGraph,用于后续编译过程中对各个逻辑Op和逻辑Tensor的查询。
生成OpGraph分为几步:(核心逻辑:OpGraph::InferLogicalBlobDesc https://github.com/Oneflow-Inc/oneflow/blob/v0.2.0/oneflow/core/graph/op_graph.cpp#L563)
按照拓扑序遍历每个Op(OpNode)
1) 推导ParallelSignature (Eager所需)
2) 推导BatchAxis(将要被废弃,描述了哪一个维度是batch维,或者没有batch维,如Variable那一支路上的op)
3) 推导MirroredSignature (推导每个Tensor是否是Mirrored,我认为这个应该跟Sbp成为同一级的东西:SBPM)
4) 推导SbpSignature
SBP是oneflow非常重要的概念,我在知乎文章——《都2020年了,为什么我们相信OneFlow会成功》 中有初步解释了SbpParallel的语义:一种逻辑上的Tensor跟物理上的多个Tensor的映射关系。SbpSignature是一个SbpParallel的集合,在OneFlow的设计里是Op的属性,它描绘了一个逻辑上的Op被映射成各个设备上的多个物理上的Op以后,这些物理上的Op是如何看待他们输入输出Tensor在逻辑上和物理上的映射关系的。
这里的推导SbpSignature,就是在每个Op多个合法的SbpSignature中搜索到一个最优的(传输代价最低的)作为本次训练实际采用的SbpSIgnature。
在自动并行(by @Yipeng1994 )完成以后,推导SbpSignature就不再是按照拓扑序贪心算法推导,而是在全局搜索一个近似次优解。
5) 推导Logical BlobDesc
此处是推导每个逻辑Op的逻辑Tensor的Shape、DType、is_dynamic等信息。
Op最重要的概念就是推导SBP,并根据SBP来推导Tensor的Shape。编译期仅需要静态推导出每个Tensor的形状,以及特殊Op需要推导其Op/Kernel的特殊属性:Inplace、TempBufferSize...
OpGraph是逻辑上的概念,当OpGraph构建完成后,每个(逻辑上的)Op、每个(逻辑上的)Tensor的描述信息都被推导、创建完成了。
3.4.3 生成LogicalGraph 【即将过时】
LogicalGraph是OneFlow的历史遗留产物,在远古时期负责逻辑图展开、后向生成、Model IO等工作。后面随着OneFlow系统设计的演化,其功能逐步被OpGraph + JobCompleter + Pass所替代。之所以目前还保留,是因为Op与TaskType的映射关系还保留在LogicalNode的不同子类中。在未来一段时间内会移除掉LogicalGraph抽象,完全由OpGraph所取代。
3.4.4 生成TaskGraph
TaskGraph的生成过程是OneFlow编译期最重要也是最精华的一部分。Task是Actor的编译期抽象,Actor是Task的运行时抽象。所以TaskGraph就描绘了整个运行时计算图的全貌。TaskGraph的生成过程分为两部分:
构图部分 (https://github.com/Oneflow-Inc/oneflow/blob/v0.2.0/oneflow/core/graph/task_graph.cpp#L156)
Build/Infer部分 (https://github.com/Oneflow-Inc/oneflow/blob/v0.2.0/oneflow/core/job/compiler.cpp#L77)
3.4.4.1 构图部分
如何根据逻辑图生成物理计算图?
1) 遍历LogicalGraph的每个LogicalNode,根据每个LogicalNode的placement:生成有序的ComputeTaskNode(专用于计算的TaskNode)
2) 遍历LogicalGraph的每个LogicalEdge,根据前后LogicalNode的类型,找到对应的生成这部分SubTaskGraph的方法:BuildSubTaskGraphMethod,执行该方法给这两个LogicalNode对应的ComputeTaskNode连边、新增节点构图。
在远古时期的OneFlow设计中,生成SubTaskGraph的方法是跟前后LogicalNode的类型相关。而在后面的boxing重构中(by: @liujuncheng, 见:Oneflow-Inc/oneflow#2248 和 Oneflow-Inc/oneflow#2846 等),生成SubTaskGraph的方法被SubTskGphBuilder所推导,根据情况构建纷繁多样的SubTaskGraph。下面会粗略介绍一下其中的设计。
下图展示了一种可能的SubTaskGraph构建方式:在LogicalGraph中,逻辑上的Op_a产出一个Tensor X 供Op_b消费,其中Op_a和Op_b的Placement分别是4,3,而Op_a和Op_b对X的SBP parallel根据各自Op的属性、用户指定/推导/自动SBP的结果确定。Tensor X就是一条LogicalEdge。第一步:分别生成所有LogicalNode对应的有序的ComputeTaskNode,Op_a的LogicalNode展开成4个CompTaskNode,Op_b的LogicalNode展开成3个ComputeTaskNode。第二步:这些ComputeTaskNode在Boxing架构中会根据实际情况新增节点,并连边,使得下面Op_b的3个TaskNode可以拿到其想要的那部分X的数据。
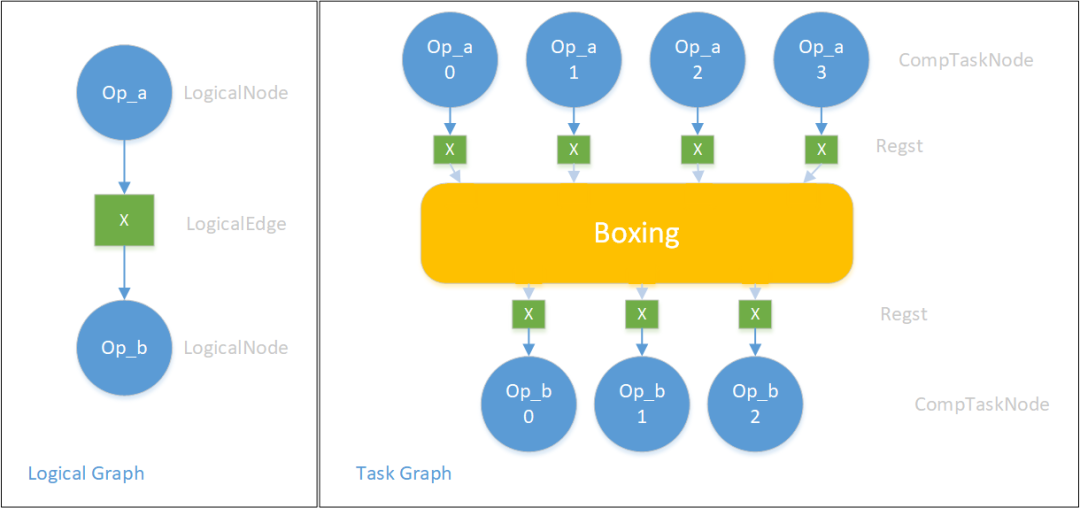
每个LogicalEdge就是一个逻辑上的Tensor,前后两个逻辑上的Op对同一个Tensor的SBP、Placement看待可能一致也可能不一致。如何构建这部分SubTaskGraph对应的子图呢?OneFlow提供了一系列SubTskGphBuilder,根据各种情况生成不同的子图。
SubTskGphBuilder
构建该子图需要的全部信息是:源节点的CompTaskNode列表,汇节点对应的CompTaskNode列表,源节点与汇节点的并行属性(ParallelDesc,SBP),传输的逻辑Tensor的信息(Shape、Dtype、LogicalBlobId...)
目前OneFlow内部有7种SubTskGphBuilder,每种Builder下面都可以根据SBP、Placement等信息自定义多种实际的构图方案,如SliceBoxingSubTskGphBuilder下面就有5种不同的构图情况,CollectiveBoxingSubTskGphBuilder下面又有7种集合通信的Builder。我们这里简单介绍几个常见的子图构建方式:
1) one to one
这是最常见的连接方式,即LogicalEdge的两端节点在ParallelNum、SBP上对中间逻辑Tensor的看待方式完全一致,可以一对一的直连。在常见的数据并行情况下(如Mirror的方式),前后向Op都是一对一直连的。下图展示了两种一对一直连情况。
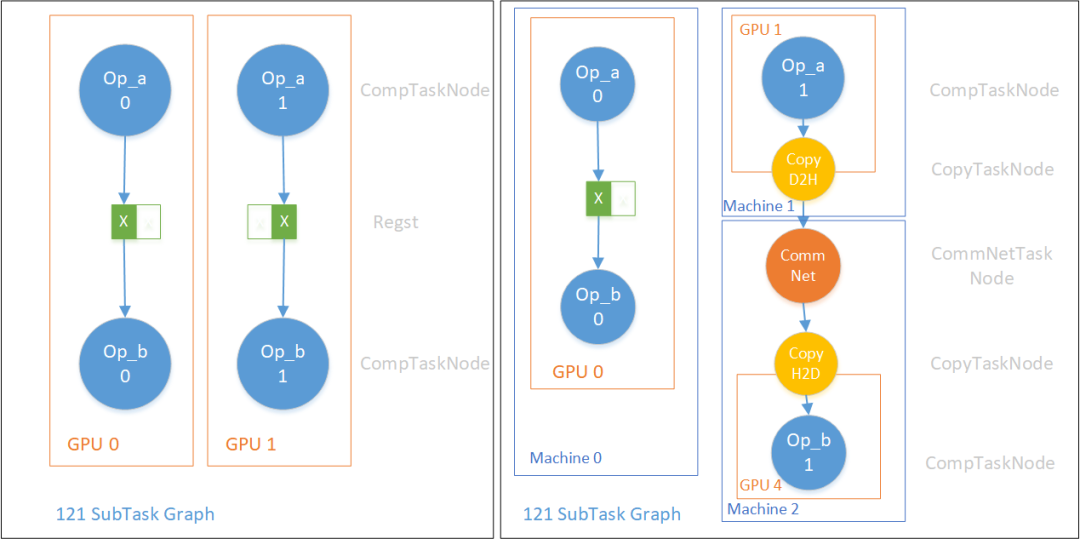
左边是GPU内部的一对一直连,右边是当两个ComputeTaskNode不在同一个设备上时,我们会插入传输节点:CopyD2H(Device to Host),CopyCommNet(网络传输),CopyH2D(Host to Device),使得一对一直连的汇节点CompTaskNode可以拿到对应的Tensor。
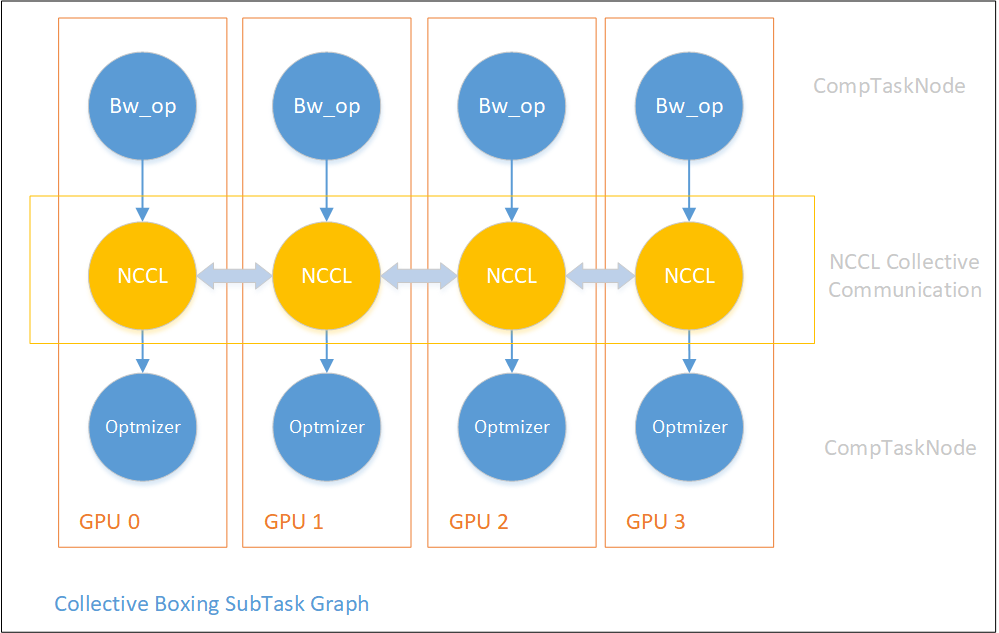
2) collective boxing
集合通信(Collective Communication)大多采用NCCL的实现,包含了:AllReduce、ReduceScatter、AllGather、Reduce、Broadcast等操作。需要注意的是:
由于NCCL多个设备上的通信是在NCCL内部实现的,在OneFlow的TaskGraph上,这些NcclTaskNode之间没有显式的连边,但其实中间有隐含的同步操作。这样如果在NCCL结点前后连控制边不当,可能会造成死锁,所以系统中对NCCL附近的顺序化连边需要非常小心。
使用NCCL进行集合通信操作,在构图上是one to one连接的。
下图展示了OneFlow中使用NCCL进行集合通信的collective boxing操作构图。
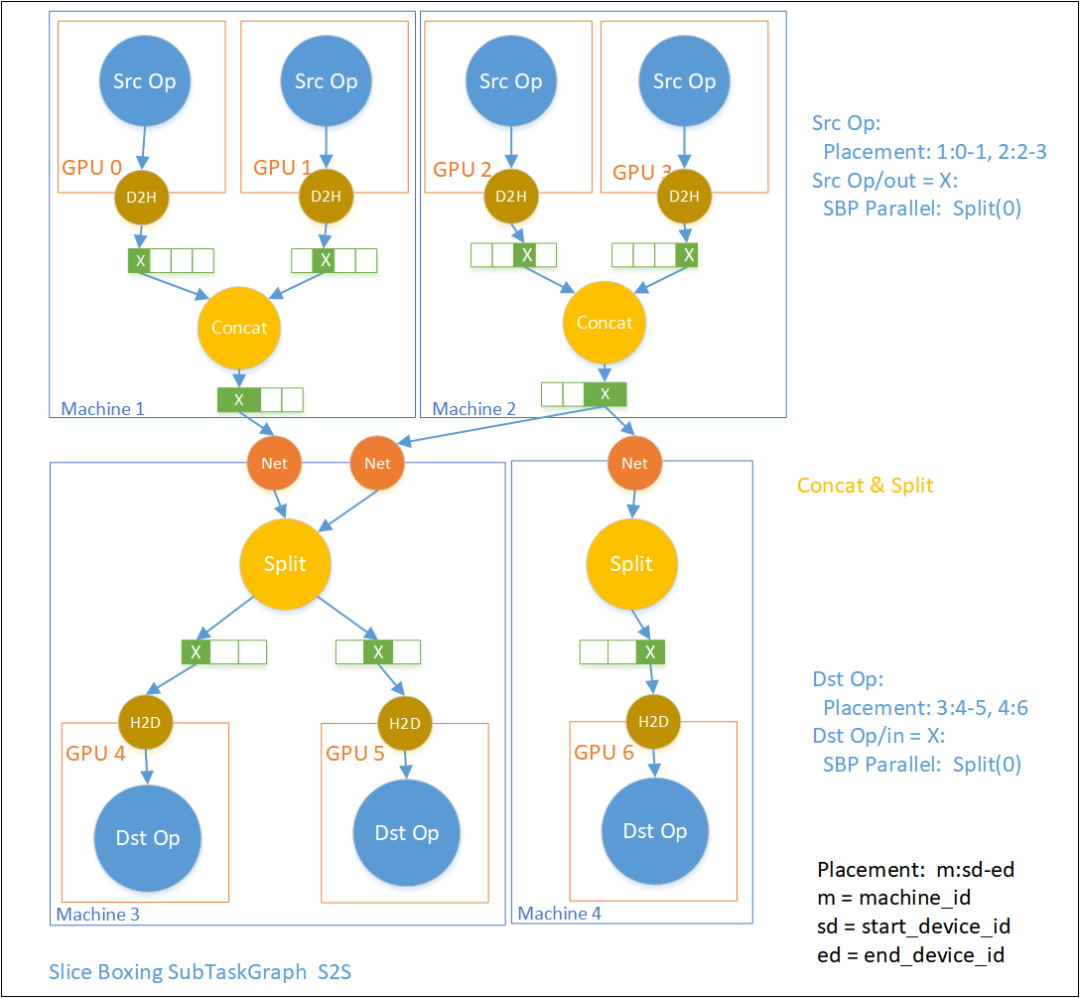
3) slice boxing
这种boxing涵盖了oneflow中遇到的大多数跟SBP相关的Boxing。在SliceBoxingSubTskGphBuilder中提供了支持S2B、S2S、P2S、P2B、B2S等5种不同的SBP情形。
slice boxing会根据上下游两组CompTaskNode的ParallelDesc、SBP的不同,把上面一组物理上的Tensor按照下游期望的SBP的方式分配给下游的一组CompTaskNode,同时考虑Machine id、CPU/GPU的不同,同时希望传输开销、构图开销尽可能少。
下图展示了一种可能的S2S的slice boxing 情形。逻辑图上SrcOp产出Tensor X供DstOp消费,其中SrcOp在Machine0的GPU0、1以及Machine1的GPU2、3上产出SBP Parallel = Split(0) 的Tensor X,而DstOp在Machine3的GPU4、5以及Machine 4的GPu6上消费SBP Parallel = Split(0)的Tensor X。故需要把已经分成4份的Tensor X 先concat起来,然后再split成3份分发给各个DstOp。
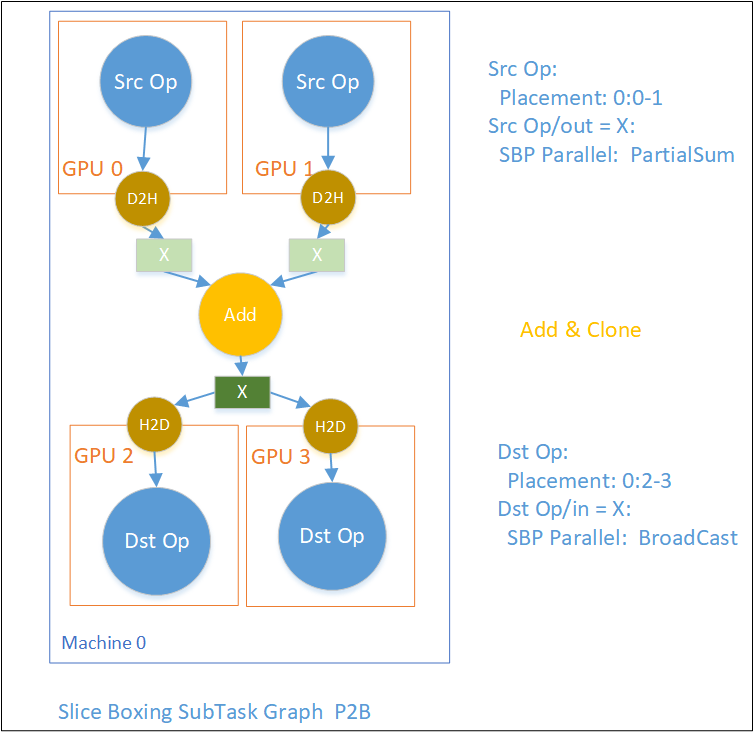
我们再举一个可能的P2B的例子。Src Op产出的两个物理Tensor X分别是逻辑Tensor X的一部分值,经过Add和Clone操作发给后面以Broadcast消费X的两个DstOp。
OneFlow中的Boxing设计是其分布式易用性以及分布式性能上最精华的一部分,这里仅介绍了其概况,后续会单独出一篇文章分享其中的设计。
我们通过SubTaskGraphBuilder给每个LogicalEdge对应的物理子图构图,这样就搭建起了整个TaskGraph,完成了逻辑图到物理图的映射。构图过程中,根据节点类型等信息可以给每个TaskNode分配Thread id、Area id等属性。
Thread id 标记了每个TaskNode(即Actor)工作在哪个线程上。由于分布式环境下每个机器上是一个进程,所以每个TaskNode都会设置Machine id和Thread id。线程id分配的方式:CPU上是平均分配各个thread id;GPU上,同一个GPU的所有计算Task在同一个计算线程中;所有集合通信的Task在同一个NCCL线程中。这样分配线程id的方式是因为经过实验验证,计算Task在相同线程中速度最快(最小切换开销)。
Area id 【即将过时】标记了不同类型的Op、TaskNode分别从属于整个TaskGraph上的哪一个区域。有一些特殊的Area如kMdUpdtArea 标记了这些Task是在Optimizer子图部分的。然而Area id是一个过时设计。应该被完备的Scope概念所取代,同时一个Op从属于哪个Area也不是Op的类型决定的,而是Op在编译期图重写的哪一个阶段被插入所决定的。后续会把Area id移除。
ChainGraph 【即将过时】
在目前的设计中,TaskGraph还会生成ChainGraph,进行Chain的合并,给每个Task上新增Chain id的属性,用于将一组Task子图标记出来(方便做内存复用)。
被合并到一个Chain中的这组Task有一个共性:在相同的Thread/Stream中执行,当Chain子图中的源节点可以执行以后,Chain子图的所有后继节点可以一股脑的执行完,不需要依赖或者再等其他的节点。
Chain的合并算法在远古时期以Layer为单位进行遍历合并时是可以较好工作的,但是目前以Op为单位就显得有些过时,尤其是在一些特殊的网络(如包含where op)中会因为图的拓扑遍历顺序的不同而有较大的合并效果差异,甚至是成环的BUG。
目前仅在内存复用算法中依赖了Chain的合并结果。后续会重构掉这块,将Chain的概念从TaskNode中去掉。
3.4.4.2 TaskGraph的Build/Infer阶段
在TaskGraph的构图完毕之后,Compiler会按照TaskGraph中TaskNode的拓扑序遍历,依次构建每个TaskNode对应的各种信息:
1) 生成每个TaskNode的所有Regst,并把Regst绑定到TaskNode的出边TaskEdge上。TaskNode::ProduceAllRegstsAndBindEdges (https://github.com/Oneflow-Inc/oneflow/blob/64c20462f245b5cbef4230a62fa06edff85411b3/oneflow/core/job/compiler.cpp#L77)
2) 将每个TaskNode的入边TaskEdge中的Regst关联到TaskNode中
3) 执行每个TaskNode的Build过程
TaskNode
TaskNode根据其不同的TaskType 有对应的TaskNode子类特化。每种类型的TaskNode其构建过程都不同。最常见的是NormalForwardCompTaskNode,对应了所有用户定义的计算Op的Actor。每种TaskNode对应一种Actor,其Actor内部执行的状态机也不同。oneflow/core/graph/路径下列出了目前所有种类的TaskNode子类及实现。
TaskNode的构建过程中,内部需要构建Regst。
Regst
Regst是OneFlow中数据存储、传递的基本单元。运行时Actor之间的消息通信,数据传递都使用Regst。在目前的Regst设计中,一个Regst会包含多个Blob(广义上的Tensor概念),但越来越多的需求是需要一个Regst仅包含一个Blob,后续的重构中,会把Blob概念整合进Tensor中,精简这里的概念。
Tensor是用户级别的概念,是独立的的一块数据,而Regst是Actor级别的概念,记录了这个Regst是由哪个Actor生产的,并被哪些Actor所消费的。
TaskNode的Build过程
TaskNode内部会有一个ExecGraph(执行子图),执行子图上的节点称之为ExecNode,边称之为ExecEdge。在远古的OneFlow设计中,每个TaskNode里是由多个Op组成的执行子图构成的,每个Op对应一个ExecNode,后面随着性能优化变成了一个TaskNode对应一个Op。我们仍然保留了ExecGraph的设计,虽然在目前的绝大多数场景中ExecGraph里只有一个ExecNode,没有ExecNode。
ExecNode 和 Op 的区别:(虽然我不止一次希望把ExecNode和Op合并)
在OneFlow最初的设计中,Op是一个描述概念,并不关心具体的某个Blob/Tensor,仅提供一系列方法用于推导,Op是无状态的。而ExecNode是在某个具体的TaskNode内部,同时要关联具体的Regst,是有状态的。
1) ExecGraph:绝大多数TaskNode的Build过程都是根据LogicalNode中的Op(CompTaskNode)/ 新建Op (CopyTaskNode),先构建ExecGraph。
2) ExecNode:bind regst。在TaskNode中,入边消费的Regst和出边生产的Regst内部都维护了一个或多个lbi(logical blob id),用于标识一个Blob(Tensor)。TaskNode的构建过程中需要把这些Regst里的lbi跟Op内部的BnInOp绑定起来。
3) ExecNode:InferBlobDesc。推导每个Blob/Tensor的Shape等信息(存储在BlobDesc中)
3.4.4.3 TaskGraph & Plan 优化
在TaskGraph Build结束以后,原本的Compiler还会对整个TaskGraph进行一些优化。在前后向分离、python前端的重构中,Compiler这里的优化被精简成了几步:
1) 移除空的Regst
2) 增加Chain内的控制边保证执行顺序
3) 推导Inplace的内存共享
Inplace的推导使用了 InplaceLbiGraph 进行推导。需要注意的是,我们在Op(UserKernel)里定义的SetInplaceProposalFn 仅是一种“建议”,而实际上这个Op的输出和输入能否Inplace,还需要经过InplaceLbiGraph进行推导以后才能决定。一些显而易见的约束是,一个Tensor不能同时被两个消费它的Op进行Inplace,因为Inplace会改写输入的Tensor数据,是一种Mutable消费。Inplace在一些情况下可以加速计算。
4) 推导时间形状(time shape)
在OneFlow的Regst中,除了其中的数据有物理上的形状,Regst本身也有时间形状(time shape),表示整个网络执行一个Batch的数据,该Regst需要被生产几次。time shape 有2维,最常见的是(1, 1),表示一个batch执行一次。一些特殊的Op/Actor会修改时间形状:Repeat/Acc、Unpack/Pack。由于这些特殊Op可能会嵌套,所以我们让时间形状有两维,表示最多允许两层嵌套。当网络中插入一个Repeat Op,会把该Tensor重复发送k次,其时间形状就是(1,k)。当网络中插入Unpack Op,会把一个Tensor切分成k段,按k次分别发送给后面的Op(相当于在时间上一种数据并行)。
如果网络中连续插入多个RepeatOp,比如第一个Repeat将输出的时间形状修改为(1, k1),后续的Regst均为该时间形状;再插入第二个Repeat,则输出的时间形状会被修改为( k2, k1)。
3.4.4.4 生成Plan
最终TaskGraph中的每个TaskNode会生成Plan中的TaskProto,得到一个naive的Plan。
Plan里最重要的内容就是所有的TaskProto,每个TaskProto就描述了运行时的一个Actor所需的所有信息。
3.4.5 Improver(naive_plan) -> complete_plan
在naive的Plan生成之后,Improver会把Plan进行改写。
Improver的最初设计是为了推导RegstNum。
在我之前的两篇知乎文章中,都提到了运行时Actor机制的相邻Actor流水线是通过RegstNum > 1来实现的。naive_plan中没有推导RegstNum,所以所有的RegstNum均=1。而Improver中设计了一套算法,用于推导每个TaskNode对应的RegstNum,但是算法依赖每个Actor的实际执行时间。所以需要有试跑。
在TaskGraph中我们hack了代码,使得所有的CopyHdTaskNode的MinRegstNum=2,也就是RegstNum=2,目的是为了让数据预处理跟GPU计算可以流水并行起来,未来会删除掉这个hack。TaskGraph上对于每个Regst都推导了其min、max的regst num,一般的数据Regst min = 1, max = inf。也有的regst,我们不希望有任何多余的备份,故让这些Regst min = 1,max = 1。
由于试跑对于后续的OneFlow开发非常不友好,于是Improver这里的试跑一直都没有被启用。而且即使所有的RegstNum = 1,在非相邻的两个Actor之间也可以流水并行起来。
目前Improver中最重要的目的是为了推导内存复用。内存复用也经历了多个阶段,一开始是使用一种染色算法对Regst进行染色,相同颜色的共用一段内存。后续我设计开发了内存复用2.0(见 Oneflow-Inc/oneflow#2267、Oneflow-Inc/oneflow#2319),采用了Chunk、MemBlock、Regst三级内存结构,仍使用Improver作为入口。所以complete_plan中会比naïve plan新增了Chunk和MemBlock的信息。OneFlow中的内存复用设计后续会单独出一篇文章进行分享。
后续会将内存复用算法放在Compiler中,使得Compiler的结果就是最终的Plan。
至此,我们就描述清楚了如何从一个Job编译成一个Plan的全过程。
本文是OneFlow系统设计分享文章的中篇,主要介绍OneFlow完整运行流程的中间部分:编译期Compiler将Job编译成Plan的过程。在下一篇《仅此一文让您掌握OneFlow框架的系统设计(下篇)》中,我们会介绍OneFlow的运行时(Runtime)以及仓库源码下的主要各目录的模块简介,其中会包含Actor运行时如何高效的调度,以及如何解决流水线和流控问题。阅读下篇,请点击第三条推送。
点击“阅读原文”,前往OneFlow代码仓库。