IoU-aware的目标检测,显著提高定位精度
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

今天新出的一篇论文IoU-aware Single-stage Object Detector for Accurate Localization,提出一种非常简单的目标检测定位改进方法,通过预测目标候选包围框与真实目标标注的IoU(交并比),并基于此与分类分数的乘积作为检测置信度,用于NMS(非极大抑制)和COCO AP计算,显著提高了目标检测的定位精度。
该文作者信息:
作者均来自华中科技大学。
在目标检测问题中,模型需要输出目标分类分数和与其对应的目标定位的包围框,在以往的模型中,经常使用分类分数作为目标定位准不准的置信度,并基于此对大量候选目标包围框NMS,现在越来越多的工作发现,分类分数高并不能保证定位精度高。
作者认为IoU是直接反应定位准不准的直接指标,可以在目标检测模型的分类和定位任务的基础上添加IoU预测的任务,可以在一定程度上反应定位置信度。
作者是在著明的一阶段目标检测算法RetinaNet基础上做的改进,如下图:
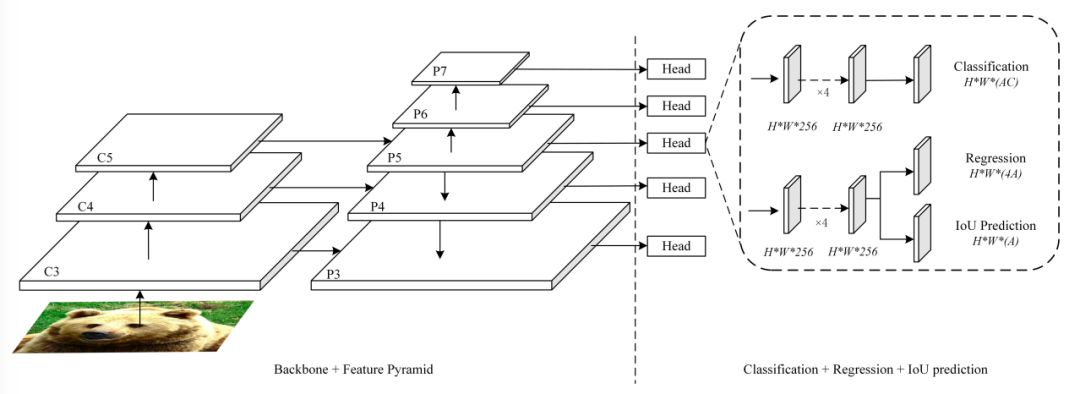
在包围框回归分支添加一个并行的预测IoU的任务。
相关的损失函数数学描述:
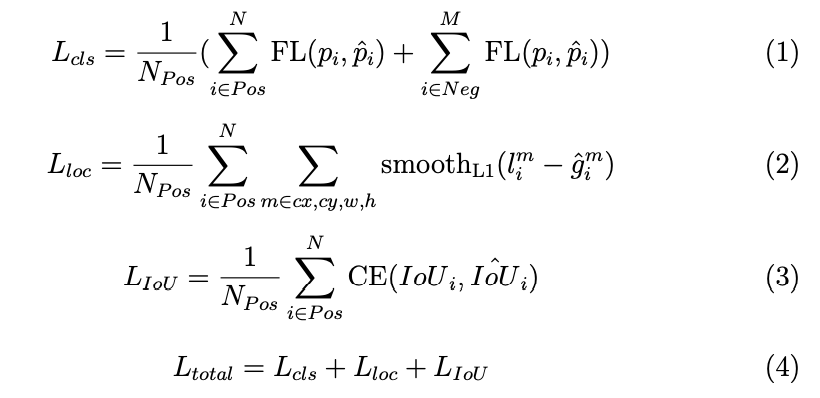
作者将分类分数和预测得到的IoU相乘,这个指标既反应了是不是这个目标,又反应了该位置和真实目标的可能的交并比,认为它是更加精确的检测置信度:
公式中参数 α 用于控制两者的贡献大小。
作者在COCO test-dev上与其他State-of-the-art算法的结果比较:
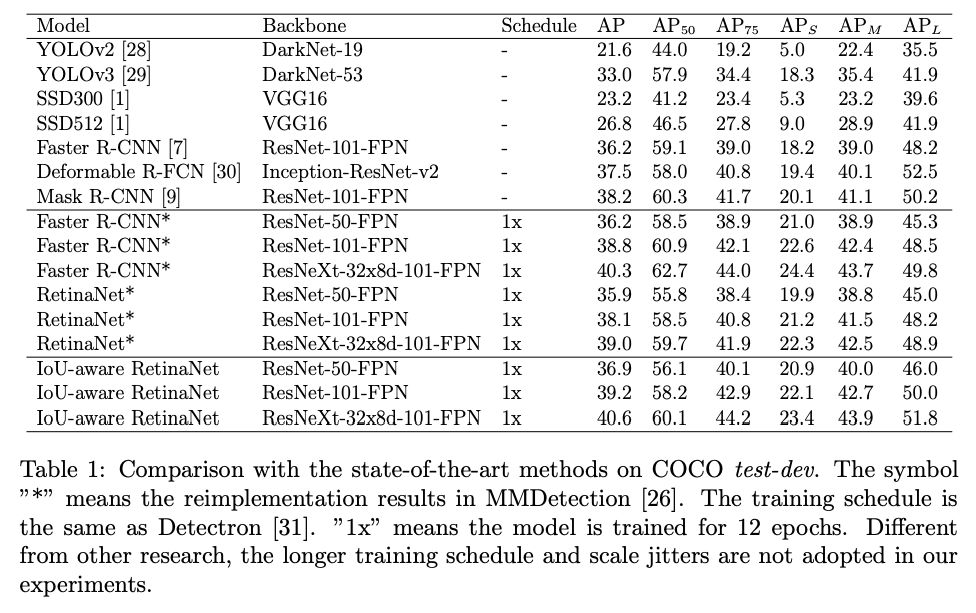
可见,相比于基线RetinaNet,取得了显著的AP提升,提升在1.0%∼1.6%之间。
在PASCAL VOC数据集上与RetinaNet的比较结果:
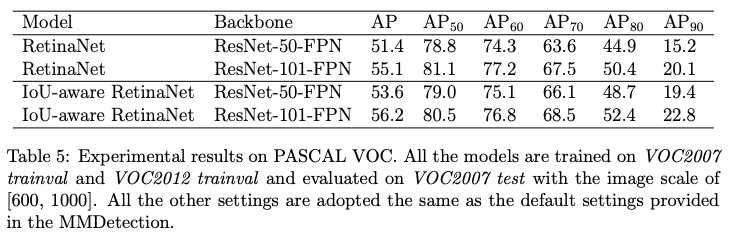
同样取得了显著的AP提升,AP 提升在1.1%∼2.2%之间。
这篇文章尽管思路比较简单,但改进还是明显的,希望对其他目标检测算法也有效,期待有更多实验结果出来。
论文地址:
https://arxiv.org/pdf/1912.05992.pdf
作者称代码将开源,不过还没公布地址。
小白团队出品:零基础精通语义分割↓↓↓
下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~