
(附代码)干货 | 摄像头单目测距原理及实现
点击左上方蓝字关注我们

作者 | 吴建明wujianming@知乎
链接 | https://zhuanlan.zhihu.com/p/137943238
一.测距原理
空间的深度或距离等数据的摄像头。
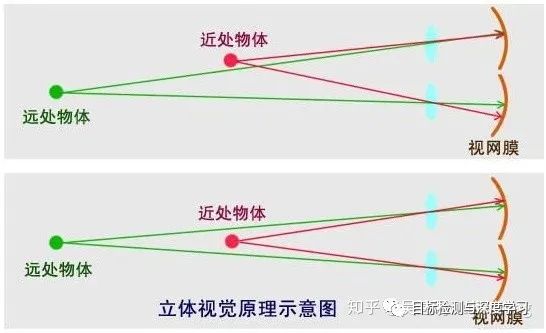
人的眼睛长在头部的前方,两只眼的视野范围重叠,两眼同时看某一物体时,产生的视觉称为双眼视觉。
双眼视觉的优点是可以弥补单眼视野中的盲区缺损,扩大视野,并产生立体视觉。
也就是说,假如只有一只眼睛,失去立体视觉后,人判断距离的能力将会下降。
这也就是单目失明的人不能考取驾照的原因。
单纯的单目视觉测距,必须已知一个确定的长度。
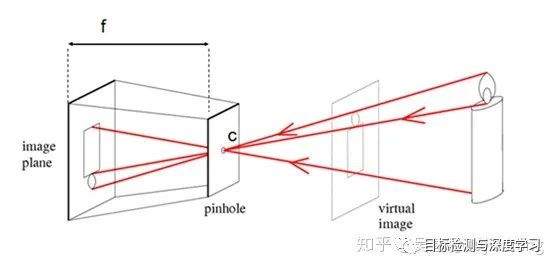
f为摄像头的焦距,c为镜头光心。物体发出的光经过相机的光心,然后成像于图像传感器或者也可以说是像平面上,如果设物体所在平面与相机平面的距离为d,物体实际高度为H,在传感器上的高度为h,H一定要是已知的,我们才能求得距离d。
假设我们有一个宽度为 W 的目标或者物体。然后我们将这个目标放在距离我们的相机为 D 的位置。我们用相机对物体进行拍照并且测量物体的像素宽度 P 。这样我们就得出了相机焦距的公式:
F = (P x D) / W
例如,假设现在我们有一张A4纸(8.27in x 11.69in), in代表英寸,1in = 25.4mm。纸张宽度W=11.69in,相机距离纸张的距离D = 32in,此时拍下的照片中A4纸的像素宽度为P=192px(我的相机实际测量得到的值)。
此时我们可以算出焦距F=(192x30)/11.69。
当我们将摄像头远离或者靠近A4纸时,就可以用相似三角形得到相机距离物体的距离。
此时的距离:D’ = (W’ x F ) / P’。
(注意:这里测量的距离是相机到物体的垂直距离,产生夹角,测量的结果就不准确了。)
二.测距步骤:
1. 使用摄像机采集道路前方的图像;
2. 在道路区域对物体进行检测,通过矩形框将物体形状框出来。
3. 结合矩形框信息,找到该矩形框底边的两个像平面坐标,分别记为(u1,v1)和(u2,v2);
4. 使用几何关系推导法,由像平面坐标点(u1, v1)、(u2, v2)推导出道路平面坐标(x1,y1)、(x2, y2);(投影到地面上,z轴为0)
5. 通过欧氏距离公式计算出d。
三.难点整理:
1.图像畸变矫正模型的理解;
(标定参数,内参矩阵,畸变矩阵,外参矩阵(平移、旋转向量矩阵))
2.像素坐标与世界坐标公式的推导及验证;
3.测距方法,对于检测物体在摄像头前方、左侧、右侧的判别思路;
4.弄清反畸变;对于畸变矫正后的图像中的检测框中的点进行反畸变处理。
四.相机镜头畸变矫正-->得到相机的内外参数、畸变参数矩阵
1. 外参数矩阵。世界坐标经过旋转和平移,然后落到另一个现实世界点(摄像机坐标)上。
2. 内参数矩阵。告诉你上述那个点在1的基础上,是如何继续经过摄像机的镜头、并通过针孔成像和电子转化而成为像素点的。
3. 畸变矩阵。告诉你为什么上面那个像素点并没有落在理论计算该落在的位置上,还产生了一定的偏移和变形.
五.实现代码
#!/usr/bin/python3# -*- coding: utf-8 -*-# Date: 18-10-29import numpy as np # 导入numpy库import cv2 # 导入Opencv库KNOWN_DISTANCE = 32 # 这个距离自己实际测量一下KNOWN_WIDTH = 11.69 # A4纸的宽度KNOWN_HEIGHT = 8.27IMAGE_PATHS = ["Picture1.jpg", "Picture2.jpg", "Picture3.jpg"] # 将用到的图片放到了一个列表中# 定义目标函数def find_marker(image):gray_img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 将彩色图转化为灰度图gray_img = cv2.GaussianBlur(gray_img, (5, 5), 0) # 高斯平滑去噪edged_img = cv2.Canny(gray_img, 35, 125) # Canny算子阈值化cv2.imshow("降噪效果图", edged_img) # 显示降噪后的图片# 获取纸张的轮廓数据img, countours, hierarchy = cv2.findContours(edged_img.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)# print(len(countours))c = max(countours, key=cv2.contourArea) # 获取最大面积对应的点集rect = cv2.minAreaRect(c) # 最小外接矩形return rect# 定义距离函数def distance_to_camera(knownWidth, focalLength, perWidth):return (knownWidth * focalLength) / perWidth# 计算摄像头的焦距(内参)def calculate_focalDistance(img_path):first_image = cv2.imread(img_path) # 这里根据准备的第一张图片,计算焦距# cv2.imshow('first image', first_image)marker = find_marker(first_image) # 获取矩形的中心点坐标,长度,宽度和旋转角度focalLength = (marker[1][0] * KNOWN_DISTANCE) / KNOWN_WIDTH # 获取摄像头的焦距# print(marker[1][0])print('焦距(focalLength) = ', focalLength) # 打印焦距的值return focalLength# 计算摄像头到物体的距离def calculate_Distance(image_path, focalLength_value):image = cv2.imread(image_path)# cv2.imshow("原图", image)marker = find_marker(image) # 获取矩形的中心点坐标,长度,宽度和旋转角度, marke[1][0]代表宽度distance_inches = distance_to_camera(KNOWN_WIDTH, focalLength_value, marker[1][0])box = cv2.boxPoints(marker)# print("Box = ", box)box = np.int0(box)print("Box = ", box)cv2.drawContours(image, [box], -1, (0, 255, 0), 2) # 绘制物体轮廓cv2.putText(image, "%.2fcm" % (distance_inches * 2.54), (image.shape[1] - 300, image.shape[0] - 20),cv2.FONT_HERSHEY_SIMPLEX, 2.0, (0, 255, 0), 3)cv2.imshow("单目测距", image)if __name__ == "__main__":img_path = "Picture1.jpg"focalLength = calculate_focalDistance(img_path)for image_path in IMAGE_PATHS:calculate_Distance(image_path, focalLength)cv2.waitKey(0)cv2.destroyAllWindows()

END
整理不易,点赞三连↓