
陀螺仪的工作原理
来源:网络素材
陀螺仪,又叫角速度传感器,是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,同时,利用其他原理制成的角运动检测装置起同样功能的装置也称陀螺仪。
●陀螺仪的名字由来
陀螺仪名字的来源具有悠久的历史。据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,因此傅科用希腊字 gyro(旋转)和skopein(看)两字合为“gyro scopei ”一字来命名该仪器仪表。
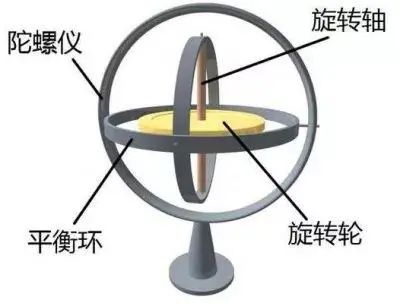
最早的陀螺仪的简易制作方式如下:即将一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度,简易图如下图所示。
其中,中间金色的转子即为陀螺,它因为惯性作用是不会受到影响的,周边的三个“钢圈”则会因为设备的改变姿态而跟着改变,通过这样来检测设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。因此一开始,陀螺仪的最主要的作用在于可以测量角速度。
●陀螺仪的基本组成
当前,从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动,更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。
陀螺仪的基本部件有:陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);附件(是指力矩马达、信号传感器等)。
●陀螺仪的工作原理
陀螺仪侦测的是角速度。其工作原理基于科里奥利力的原理:当一个物体在坐标系中直线移动时,假设坐标系做一个旋转,那么在旋转的过程中,物体会感受到一个垂直的力和垂直方向的加速度。
台风的形成就是基于这个原理,地球转动带动大气转动,如果大气转动时受到一个切向力,便容易形成台风,而北半球和南半球台风转动的方向是不一样的。用一个形象的比喻解释了科里奥利力的原理。

具体来说,陀螺仪,是一个圆形的中轴的结合体。而事实上,静止与运动的陀螺仪本身并无区别,如果静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能立定的。而如果陀螺仪本身尺寸不平衡的话,在静止下就会造成陀螺仪模型倾斜跌倒,因此不均衡的陀螺仪必然依靠旋转来维持平衡。
陀螺仪本身与引力有关,因为引力的影响,不均衡的陀螺仪,重的一端将向下运行,而轻的一端向上。在引力场中,重物下降的速度是需要时间的,物体坠落的速度远远慢于陀螺仪本身旋转的速度时,将导致陀螺仪偏重点,在旋转中不断的改变陀螺仪自身的平衡,并形成一个向上旋转的速度方向。当然,如果陀螺仪偏重点太大,陀螺仪自身的左右互作用力也将失效。
而在旋转中,陀螺仪如果遇到外力导致,陀螺仪转轮某点受力。陀螺仪会立刻倾斜,而陀螺仪受力点的势能如果低于陀螺仪旋转时速,这时受力点,会因为陀螺仪倾斜,在旋转的推动下,陀螺仪受力点将从斜下角,滑向斜上角。而在向斜上角运行时,陀螺仪受力点的势能还在向下运行。这就导致陀螺仪到达斜上角时,受力点的剩余势能将会将在位于斜上角时,势能向下推动。
而与受力点相反的直径另一端,同样具备了相应的势能,这个势能与受力点运动方向相反,受力点向下,而它向上,且管这个点叫"联动受力点"。当联动受力点旋转180度,从斜上角到达斜下角,这时联动受力点,将陀螺仪向上拉动。在受力点与联动受力互作用力下,陀螺仪回归平衡。
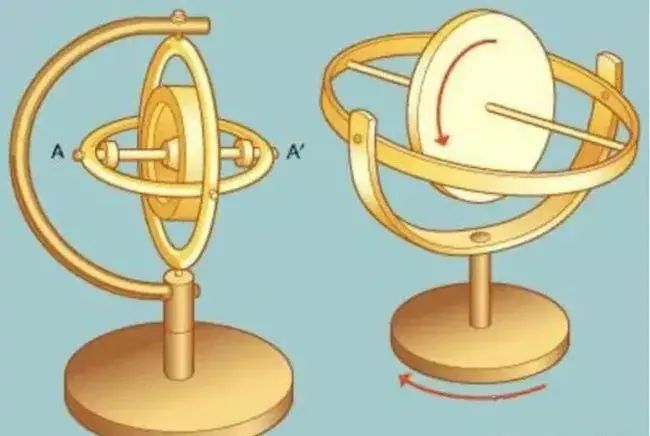
高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于垂直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
这陀螺仪和重力传感器有什么区别呢?区别很多,但最大的区别就是重力传感对于空间上的位移感受维较少,能做到6个方向的感应就已经很不错了,而陀螺仪则是全方位的。这很重要,毫不夸张的说,这两者不是一个级别上的产品。
可能看到这里,大家还是会觉得有些迷惑,既然陀螺仪很厉害,那么它在手机上到底有什么用呢?我们不妨来看看。
第一大用途,导航。陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。
第二大用途,可以和手机上的摄像头配合使用,比如防抖,这会让手机的拍照摄像能力得到很大的提升。
第三大用途,各类游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果。有关这点,想必用过任天堂WII的兄弟会有很深的感受。
第四大用途,可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。
第五大用途,也是未来最有前景和应用范围的用途。下面重点说说。那就是可以帮助手机实现很多增强现实的功能。增强现实是近期才冒出的概念,和虚拟现实一样,是计算机的一种应用。大意是可以通过手机或者电脑的处理能力,让人们对现实中的一些物体有跟深入的了解。如果大家不理解,举个例子,前面有一个大楼,用手机摄像头对准它,马上就可以在屏幕上得到这座大楼的相关参数,比如楼的高度,宽度,海拔,如果连接到数据库,甚至可以得到这座大厦的物主、建设时间、现在的用途、可容纳的人数等等。
这种增强现实技术可不是用来满足大家的好奇心,在实际生产上,其用途非常广泛,比如盖房子,用手机一照,就知道墙是否砌歪了?歪了多少?再比如,假如您是一位伊拉克抵抗美军的战士,平时只需要揣着一部此类手机,去基地那里转转,出来什么坦克,装甲车或者直升机,用手机对准拍下,马上就能判断出武器的型号,速度、运动方向.
陀螺仪是一种既古老而又很有生命力的仪器,从第一台真正实用的陀螺仪器问世以来已有大半个世纪,直到现在,陀螺仪仍在吸引着人们对它进行研究,这是由于它本身具有的特性所决定的。陀螺仪最主要的基本特性是它的定轴性(inertia or rigidity)和进动性(precession),这两种特性都是建立在角动量守恒的原则下。人们从儿童玩的地陀螺中早就发现高速旋转的陀螺可以竖直不倒而保持与地面垂直,这就反映了陀螺的定轴性。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。

定轴性(inertia or rigidity)。当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。其稳定性随以下的物理量而改变:转子的转动惯量愈大,稳定性愈好;转子角速度愈大,稳定性愈好。
进动性(precession)。当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直,这种特性,叫做陀螺仪的进动性。进动角速度的方向取决于动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,而且是自转角速度矢量以最短的路径追赶外力矩。
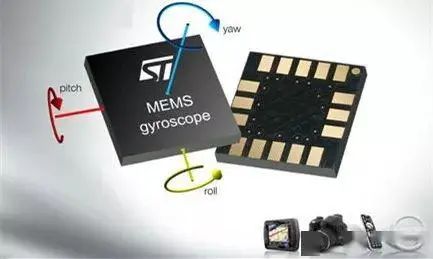
MEMS陀螺仪
●常见的七大陀螺仪
根据陀螺仪的定轴性(inertia or rigidity)和进动性(precession)制成的各种仪表或装置,常见的陀螺仪主要有以下几种:
陀螺罗盘。供航行和飞行物体作方向基准用的寻找并跟踪地理子午面的三自由度陀螺仪。其外环轴铅直,转子轴水平置于子午面内,正端指北;其重心沿铅垂轴向下或向上偏离支承中心。转子轴偏离子午面时同时偏离水平面而产生重力矩使陀螺旋进到子午面,这种利用重力矩的陀螺罗盘称摆式罗盘。21世纪发展为利用自动控制系统代替重力摆的电控陀螺罗盘,并创造出能同时指示水平面和子午面的平台罗盘。
速率陀螺仪。用以直接测定运载器角速率的二自由度陀螺装置。把均衡陀螺仪的外环固定在运载器上并令内环轴垂直于要测量角速率的轴。当运载器连同外环以角速度绕测量轴旋进时,陀螺力矩将迫使内环连同转子一起相对运载器旋进。陀螺仪中有弹簧限制这个相对旋进,而内环的旋进角正比于弹簧的变形量。由平衡时的内环旋进角即可求得陀螺力矩和运载器的角速率。积分陀螺仪与速率陀螺仪的不同处只在于用线性阻尼器代替弹簧约束。当运载器作任意变速转动时,积分陀螺仪的输出量是绕测量轴的转角(即角速度的积分)。以上两种陀螺仪在远距离测量系统或自动控制、惯性导航平台中使用较多。
陀螺稳定平台。以陀螺仪为核心元件,使被稳定对象相对惯性空间的给定姿态保持稳定的装置。稳定平台通常利用由外环和内环构成制平台框架轴上的力矩器以产生力矩与干扰力矩平衡使陀螺仪停止旋进的稳定平台称为动力陀螺稳定器。陀螺稳定平台根据对象能保持稳定的转轴数目分为单轴、双轴和三轴陀螺稳定平台。陀螺稳定平台可用来稳定那些需要精确定向的仪表和设备,如测量仪器、天线等,并已广泛用于航空和航海的导航系统及火控、雷达的万向支架支承。根据不同原理方案使用各种类型陀螺仪为元件。其中利用陀螺旋进产生的陀螺力矩抵抗干扰力矩,然后输出信号控、照相系统。
陀螺仪传感器。陀螺仪传感器是一个简单易用的基于自由空间移动和手势的定位和控制系统。在假象的平面上挥动鼠标,屏幕上的光标就会跟着移动,并可以绕着链接画圈和点击按键。当你正在演讲或离开桌子时,这些操作都能够很方便地实现。陀螺仪传感器原本是运用到直升机模型上的,已经被广泛运用于手机这类移动便携设备上(IPHONE的三轴陀螺仪技术)。
光纤陀螺仪。光纤陀螺仪是以光导纤维线圈为基础的敏感元件, 由激光二极管发射出的光线朝两个方向沿光导纤维传播。光传播路径的变化,决定了敏感元件的角位移。光纤陀螺仪与传统的机械陀螺仪相比,优点是全固态,没有旋转部件和摩擦部件,寿命长,动态范围大,瞬时启动,结构简单,尺寸小,重量轻。与激光陀螺仪相比,光纤陀螺仪没有闭锁问题,也不用在石英块精密加工出光路,成本低。

激光陀螺仪。激光陀螺仪的原理是利用光程差来测量旋转角速度(Sagnac效应)。在闭合光路中,由同一光源发出的沿顺时针方向和反时针方向传输的两束光和光干涉,利用检测相位差或干涉条纹的变化,就可以测出闭合光路旋转角速度。
MEMS陀螺仪。基于MEMS的陀螺仪价格相比光纤或者激光陀螺便宜很多,但使用精度非常低,需要使用参考传感器进行补偿,以提高使用精度。MEMS陀螺仪采用的是依赖于相互正交的震动和转动引起的交变科里奥利力,MEMS陀螺仪利用coriolis,将旋转物体的角速度转换成与角速度成正比直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的。
●陀螺仪的应用
陀螺仪在航天航空中的应用
陀螺仪器最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。

陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感元件,即可作为信号传感器。根据需要,陀螺仪器能提供准确的方位、水平、位置、速度和加速度等信号,以便驾驶员或用自动导航仪来控制飞机、舰船或航天飞机等航行体按一定的航线飞行,而在导弹、卫星运载器或空间探测火箭等航行体的制导中,则直接利用这些信号完成航行体的姿态控制和轨道控制。作为稳定器,陀螺仪器能使列车在单轨上行驶,能减小船舶在风浪中的摇摆,能使安装在飞机或卫星上的照相机相对地面稳定等等。
作为精密测试仪器,陀螺仪器能够为地面设施、矿山隧道、地下铁路、石油钻探以及导弹发射井等提供准确的方位基准。
由此可见,陀螺仪器的应用范围是相当广泛的,它在现代化的国防建设和国民经济建设中均占重要的地位。
陀螺仪在消费电子领域的创新应用
陀螺仪的出现,给了消费电子很大的应用发挥空间。比如就设备输入的方式来说,在键盘、鼠标、触摸屏之后,陀螺仪又给我们带来了手势输入,由于它的高精度,甚至还可以实现电子签名;还比如让智能手机变得更智慧:除了移动上网、快速处理数据外,还能“察言观色”,并提供相应的服务。
导航。陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。
相机防抖。陀螺仪可以和手机上的摄像头配合使用,比如防抖,这会让手机的拍照摄像能力得到很大的提升。
提升游戏体验。各类手机游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果,如横屏改竖屏、赛车游戏拐弯等等。
作为输入设备。陀螺仪还可以用作输入设备,它相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。
同时,除了我们熟悉的智能手机以外,汽车上也用了很多微机电陀螺仪,在高档汽车中,大约采用25至40只MEMS传感器,用来检测汽车不同部位的工作状态,给行车电脑提供信息,让用户更好的控制汽车。
版权声明:本文来源网络,免费传达知识,版权归原作者所有。如涉及作品版权问题,请联系我进行删除。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
关注我的微信公众号,回复“加群”按规则加入技术交流群。
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。