
雷达的工作原理
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
推荐阅读

雷达最初被军方用来检测敌机,在战争期间是一个重要的传感器被各方使用。如今,它被广泛用于自适应巡航控制以及自动驾驶中的障碍物检测。下面让我们看一下该传感器的工作原理、优缺点以及如何检测物体的位置和速度。
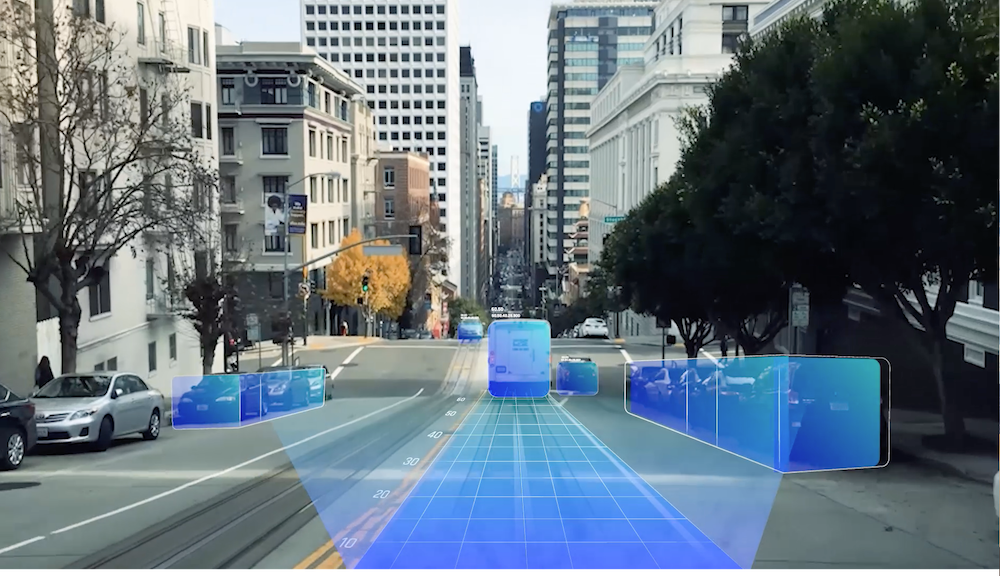
在自动驾驶汽车中,雷达用于自动驾驶时是一种出色的互补传感器,可以解决其他传感器的一些弱点。像Tesla或Comma.ai之类的公司使用RADAR与摄像头相结合来确保系统能正常工作,并获得了出色的传感器融合模块。
总而言之,雷达可以直接测量物体的速度,并且可以在白天,夜晚,雨天,雾天,大雪等不同场景下工作,而其他传感器可能会遇到问题。
介绍
RADAR利用无线测距,通过发出电磁(EM)波,该电磁波在遇到障碍物时会反射。由于它使用EM波工作,因此可以在任何条件下工作。
我们必须了解的一件事是,我们正在处理电磁波,就像在高中物理中一样。
每个波都有一个波长,一个频率,一个振幅和一个相位。

处理这些波浪将帮助我们找到障碍。
FMCW
有许多不同类型的雷达,其中最常用的是一种称为FMCW-调频连续波。该波看起来像这样:这是一个称为锯齿的信号,其频率可以随时间增加或减少。
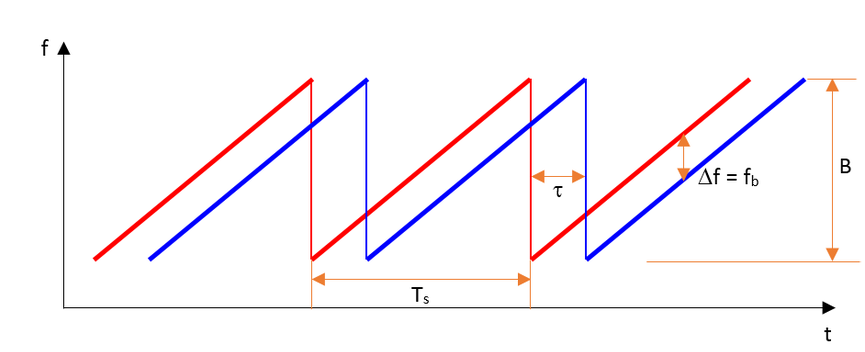
(资源)
FMCW雷达的硬件包括很多东西:
频率合成器-一种将波设置为正确频率的装置。
功率放大器—一种放大信号的东西,以便RADAR可以在远距离(300m)看到。
天线—一种将电能转换为电磁波的东西,该电磁波被发送到特定的方向并被反射(返回到天线)。
混频器-有助于频移的功能。
处理器-就像在任何计算机中一样,处理器可以帮助进行计算,我们甚至可以处理信号来进行机器学习,聚类,跟踪等。
当发射的波到达物体时;它反映了。但是如何反映的?大家会注意到,物体并不总是完全反射回RADAR的天线。反射指数称为雷达横截面(RCS) 用于并考虑到:目标的几何形状、雷达的方向、频次、靶材。RCS是一种考虑了所有这些因素的指标。
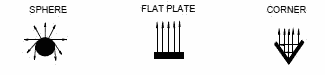
现在考虑一下隐形飞机的以下图像。这种类型的飞机可能完全未被RADAR探测到,这是因为其几何形状设计可将波向其他方向偏转,其光滑的表面以及旨在吸收波的非反射性涂料,因此它们不会返回发射器。

由于反射率和其他因素,可以使用RADAR对障碍物进行分类。
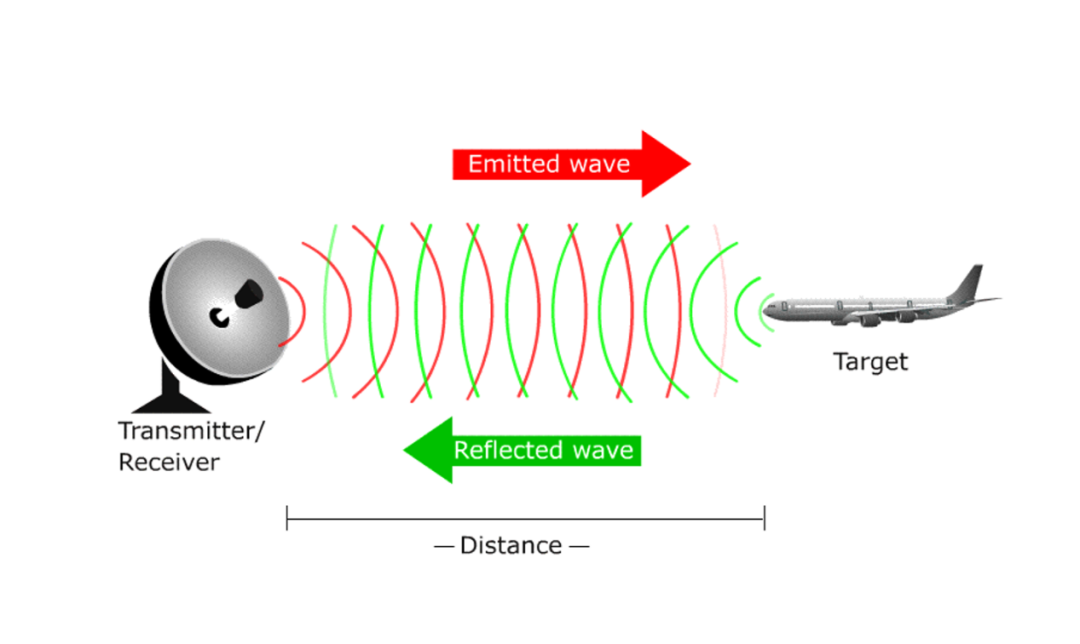
当我们想使用雷达时,涉及许多不同的方程式。实际上,这是100%的信号处理。但是,数学很简单,在数学上并不难。假设我们前面有辆汽车,我们需要知道它与我们之间的距离。

我们知道信号的速度,因为它在空中传播。c = 3×10⁸。
我们可以测量信号返回的时间:T。那么,达到目标所需的时间为T / 2。
范围只是R = c * T / 2。

这就是所谓的多普勒效应。
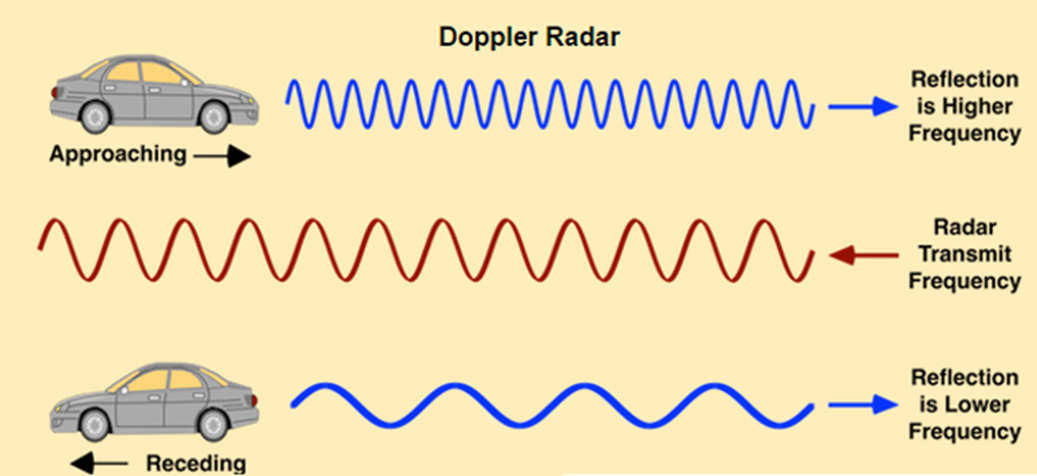
如大家所见,几个波完全不同。
红波是雷达发射的信号。
顶部的蓝波是正在接近的车辆的反射波-波长很小。
底部的蓝色波是远离我们的车辆的反射波-波长很大。
当我们计算频率偏移时,我们可以确定车辆的速度和方向:这称为多普勒效应。
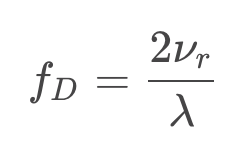
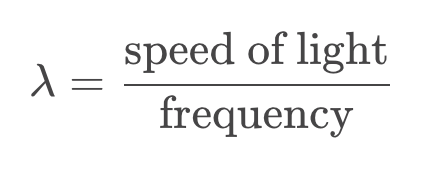
多普勒频移方程
我们知道:
fD-频率偏移(已测量,未保留详细信息)
λ—波长
因此,我们可以确定车辆的速度ν。
RADAR的输出没有任何逻辑信息,它只显示了波动。我们在此波中唯一可以看到的是幅度和频率。利用快速傅立叶变换(FFT)将该波转换为可解释的信号。

一旦进入频域,我们可以注意到一些波在不同的频率处反射,并将它们与其他波分开。每个峰代表检测到的障碍。
雷达是一种非常复杂的传感器,对于一个障碍RADAR可能输出5或6次检测。没有障碍物时出于一些未知原因,雷达可能也会显示了一些检测结果。我们称之为噪音。噪音来自各种事物,苏打水可以反射一些波,让他并看起来像是障碍物。为了过滤噪声,我们使用一种称为SNR或信噪比的度量。雷达输出波和振幅。幅度越高,检测的可能性越高。

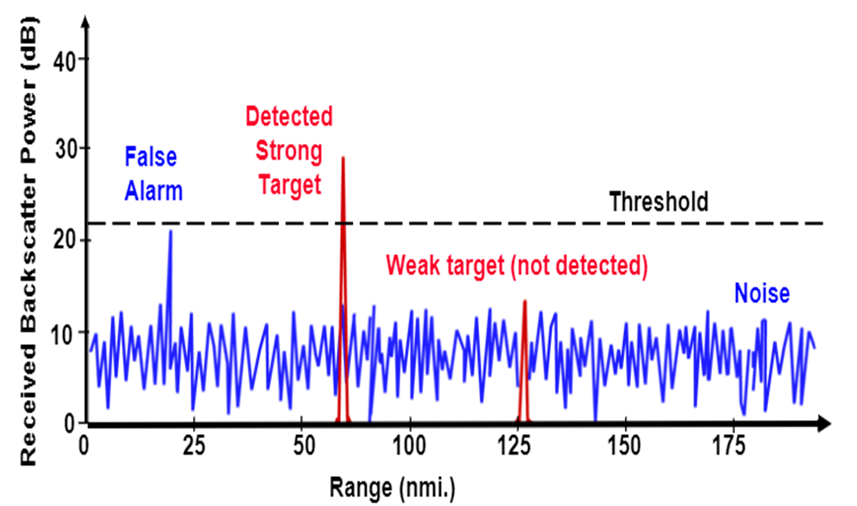
最后,我们能够检测到障碍物并估算其速度。但是我们得到的仅仅是反射波,这要归功于FFT。我们可以输出许多结果,并且可能需要对输出进行聚类。

聚类算法是基于距离计算的算法,例如欧几里得聚类或K均值聚类。
结论—
RADAR是一个非常强大的工具。由于噪音,它不能真正在自动驾驶环境中单独使用。但它可以与相机或LiDAR结合使用,功能非常强大。它可以在许多条件下工作,并且可以直接估算范围和速度。通过一些工作,它甚至可以进行物体的分类。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~