
机器视觉边缘模式检测
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
图像边缘是两个具有不同灰度的均匀图像区域的边界,边缘检测是图像处理的基本问题,目的是标识数字图像中亮度变化明显的边缘点,不断向上构成更高层次的特征描述。并且剔除不相关的特征信息,保留图像重要的结构属性。
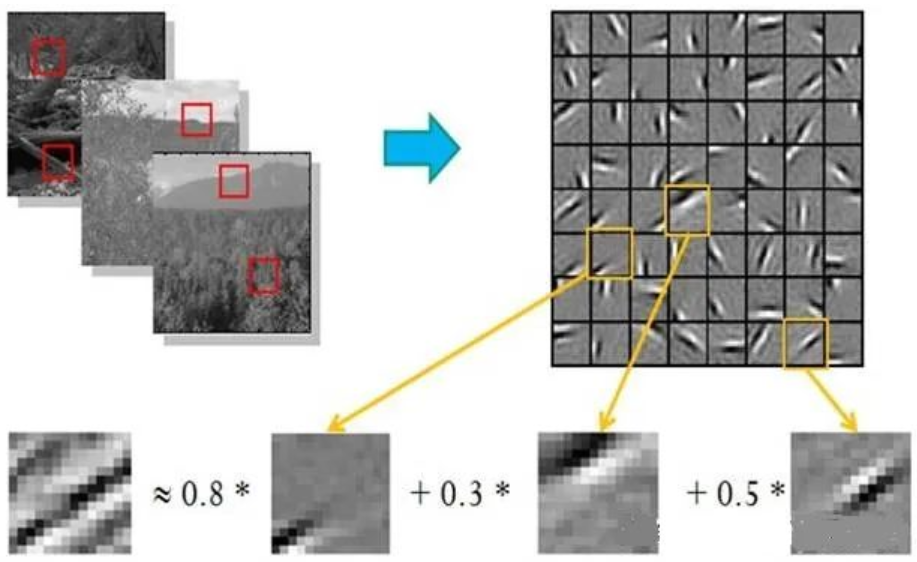
在视觉计算理论框架中,抽取二维图像上的边缘、角点、纹理等基本特征,是整个系统框架中的第一步,图像中局部灰度级以简单的方式作极快变换的小区域特征所组成的图称为基元图,在不同"尺度"意义下的边缘点,在一定条件下包含了原图像的全部信息。
检测方法
滤波
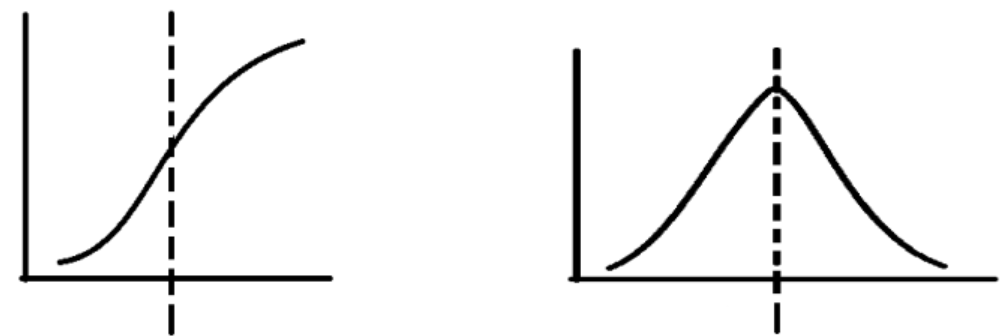
边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数的计算对噪声很敏感,因此使用滤波器来改善与噪声有关的边缘检测器的性能。大多数滤波器在降低噪声的同时也导致了边缘强度的损失,因此,增强边缘和降低噪声之间需要折中。
检测
在图像中有许多点的梯度幅值比较大,这些点在特定的应用领域中并不都是目标边缘,所以应该用某种算法来确定哪些点是边缘点。

在图像边缘检测中,抑制噪声和边缘精确定位是无法同时满足的,一些边缘检测算法通过平滑滤波去除噪声的同时,也增加了边缘定位的不确定性。而提高边缘检测算子对边缘的敏感性的同时,也提高了对噪声的敏感性。
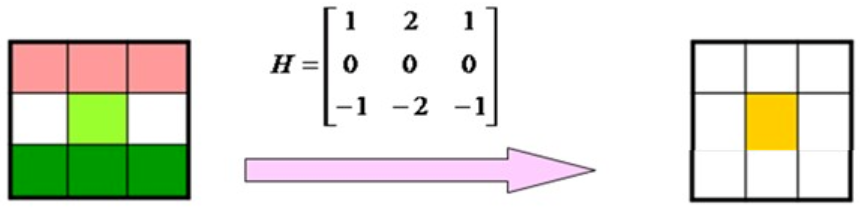
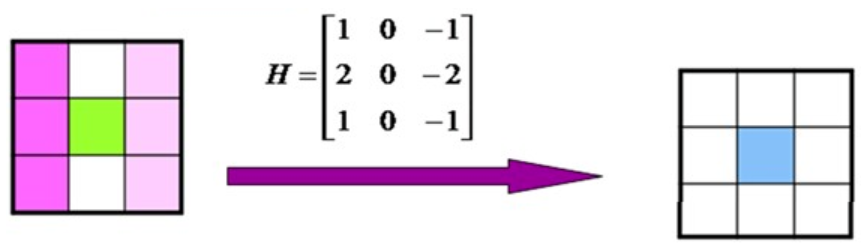
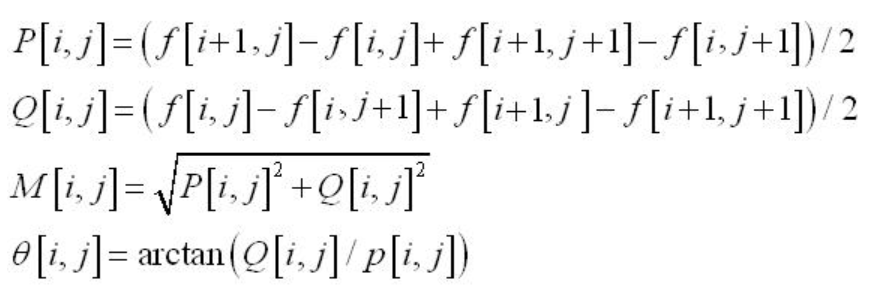
如上述所说,一阶算子检测边缘,如Robert,虽然对边缘定位精度较高,但是容易丢失边缘,对噪声无抑制能力。又如Sobel,对噪声仅有一点抑制能力,但无法完全排除虚假边缘。又如二阶拉普拉斯算子,对噪声响应很高。或者改进后的高斯-拉普拉斯算法,虽然经过高斯模糊,但是这些模糊不能完全去除噪声,没处理的好,反而会影响边缘检测的效果。
来源:西安德伍拓
本文仅做学术分享,如有侵权,请联系删文。
评论