
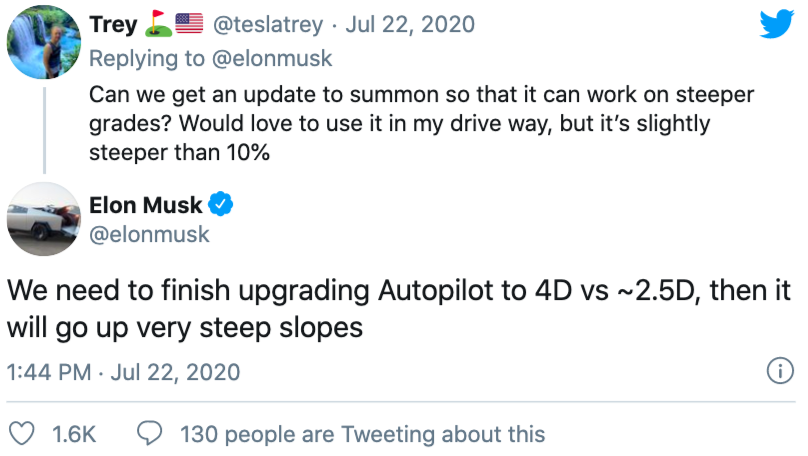
特斯拉将Autopilot升级为4D系统,马斯克:一头真正的性能野兽
新智元报道
新智元报道
来源:teslarati
编辑:雅新
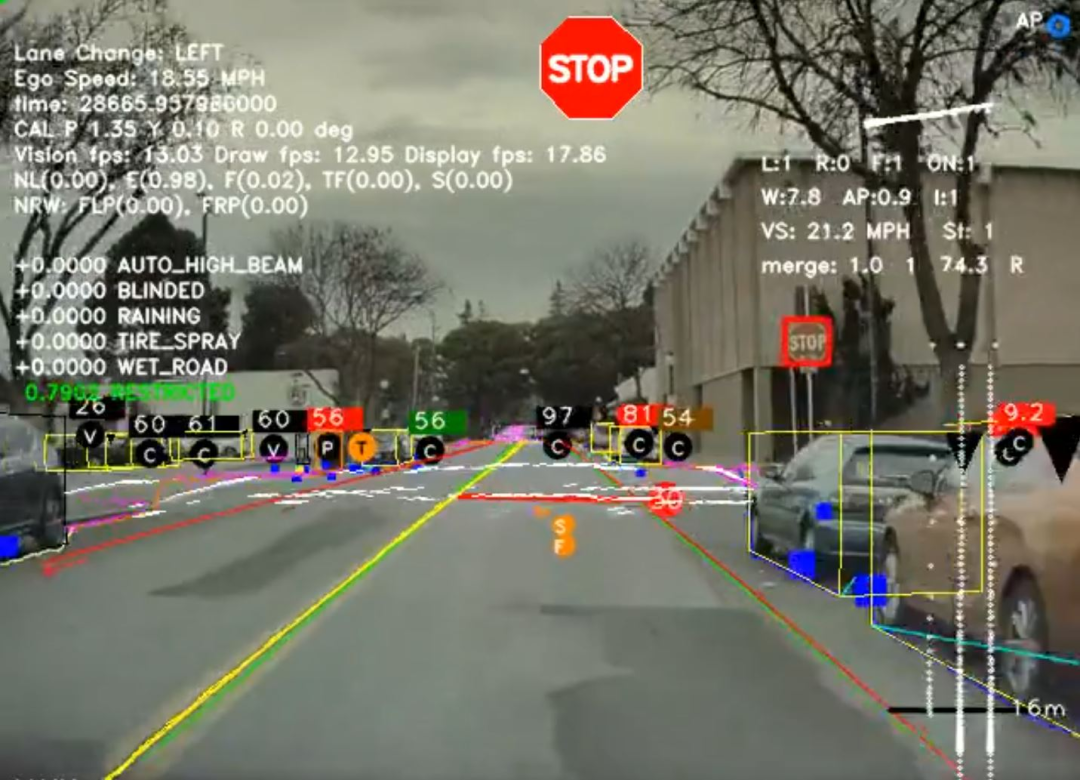
【新智元导读】近日,马斯克表示,公司正在开发一种名为Dojo的神经网络训练计算机,以处理大量的视频数据。Dojo有望为特斯拉4D化Autopilot系统的开发提供助力。
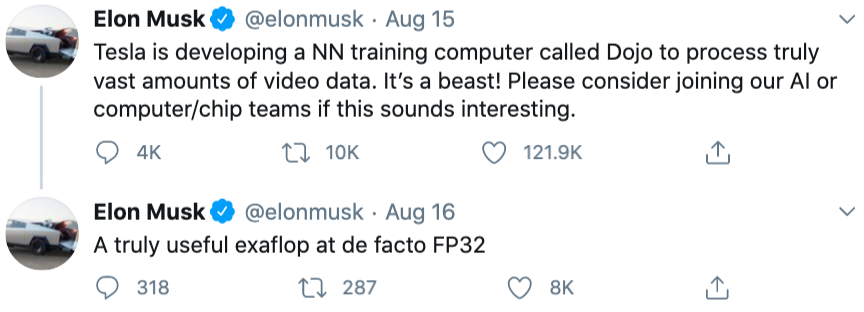
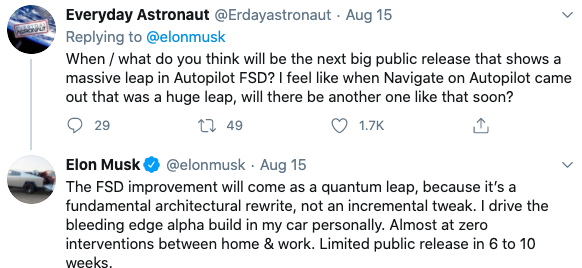
Dojo将大量提升自驾性能,两个月内限量发行



参考链接:
https://www.teslarati.com/tesla-patent-autopilot-enhance-object-identification/
https://www.teslarati.com/tesla-autopilot-4d-upgrade-improvements/
https://www.teslarati.com/tesla-dojo-autopilot-neural-network-training/
https://www.sohu.com/a/413262250_114760
http://www.techweb.com.cn/world/2020-08-17/2800949.shtml

评论