
登Nature封面!浙大研发中国「怪鱼」,裸泳全球最深万米海沟!

新智元报道
新智元报道
来源:Nature
编辑:小匀、朋宇
【新智元导读】马里亚纳海沟,无人之境。即使是机器人,也要身穿「盔甲」才得以下潜。然而,一些软体海洋动物,却能在那里「赤身」畅游。我们能否由此得到启发、探索深海?在最新的Nature封面故事中,一条来自中国的「软体机器鱼」可以给出答案。
某种程度上,我们对海下的世界一无所知。
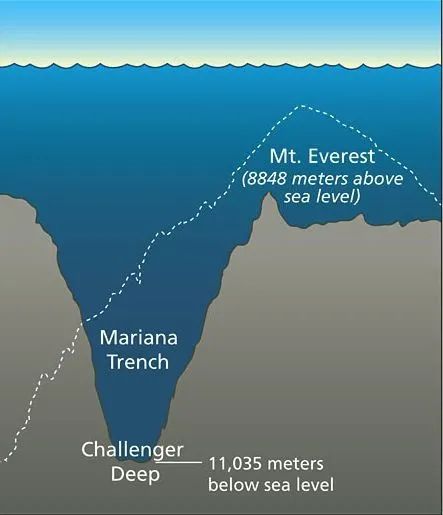
马里亚纳海沟,地球目前已知最深的海沟。其深度超过了11公里。如果把珠穆朗玛峰放进去,还有两千多米才能够露出水面。
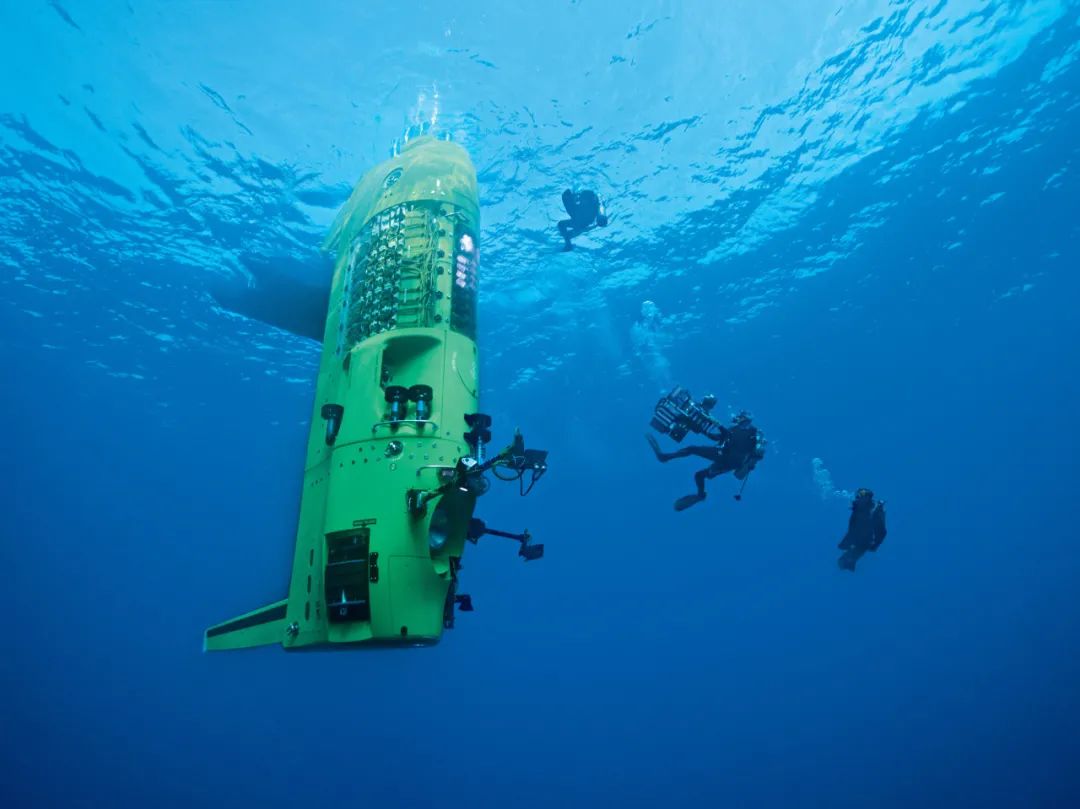
多年来,人类利用水下机器人探索马里亚纳世界——相比于我们,它们能利用一个不受深海压力影响的外壳,保护内在的电池和电子元件。
但根据今天《自然》杂志的封面报道,外壳可能并非必要。

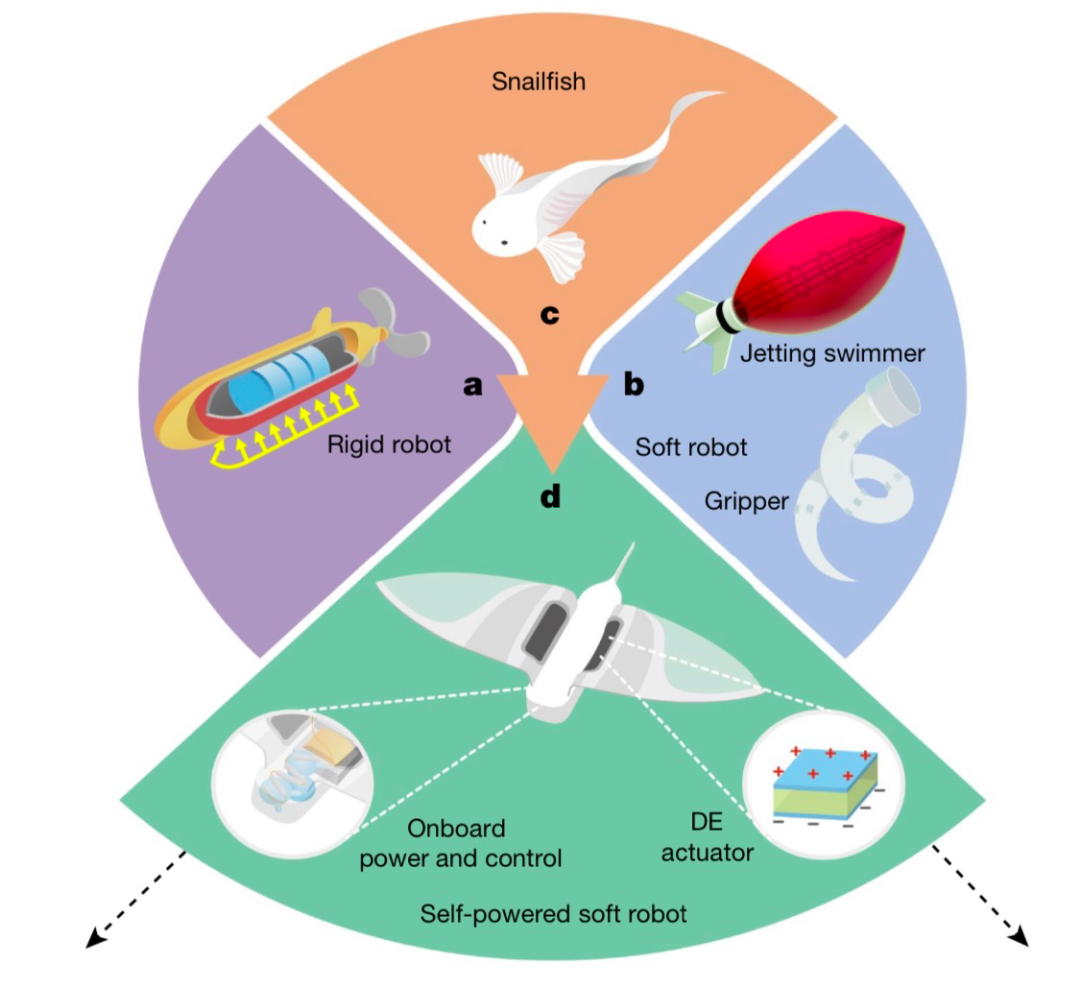
受一条奇怪的鱼的启发,来自浙江大学、之江实验室的科研人员设计了一种柔软的自主机器人,它可以承受海洋最深处的巨大压力,即使在马里亚纳海沟10900米深度的地方,它依然能够拍鳍振翅。
题为「Self-powered soft robot in the Mariana Trench」的论文发表在最新一期Nature上,一作为之江实验室的李国瑞博士,通讯作者为浙江大学李铁风教授。

灵感来源:那条「抗压」的深海鱼
谁也无法承受来自海底的压力。
在马里亚纳海沟的最深处、海平面以下约10900米处,上覆的水所产生的压力大约是海平面大气压力的一千倍,相当于约1.03亿帕斯卡。
「这相当于一头大象站在你的拇指上面。」纽约州立大学杰尼西奥分校的深海生理学家和生态学家Mackenzie Gerringer说。
传统的深海机器人虽有刚性金属加持,但却因笨重的身躯而显得不够灵活。于是,科学家们一直向章鱼等海洋软体动物寻找灵感。
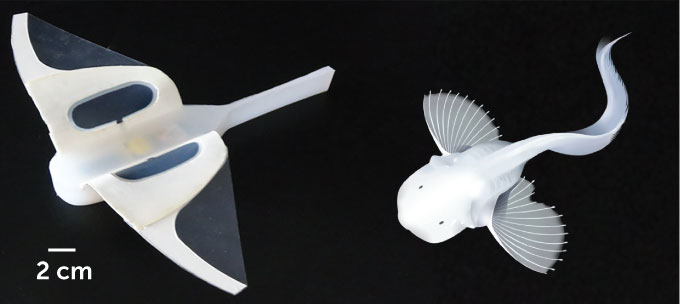
这时,钝口拟狮子鱼(Pseudoliparis swirei)出现了,这是一种半透明的鱼,能够在马里亚纳海沟8,000米处生活。
 2018年,在阿塔卡马海沟发现的钝口拟狮子鱼(如图所示一种),它们生活在深度约7500米的地方。此外,在马里亚纳海沟也有发现
2018年,在阿塔卡马海沟发现的钝口拟狮子鱼(如图所示一种),它们生活在深度约7500米的地方。此外,在马里亚纳海沟也有发现
这类鱼很适合生活在高压深海环境中,它们的身体呈流线型,只有部分头骨硬化。
但是,设计出「机器鱼」却是另外一回事。
自主勘探机器人不仅需要电子装置为提供动力,还需要执行各种任务,无论是照明、拍摄深海海沟,还是测试水的化学成分,收集样本带回海面,都很困难。因为在水压下,这些电子器件会相互挤压。
这条鱼提供了别样的灵感:它的头骨骨质坚硬,没有完全融合在一起。
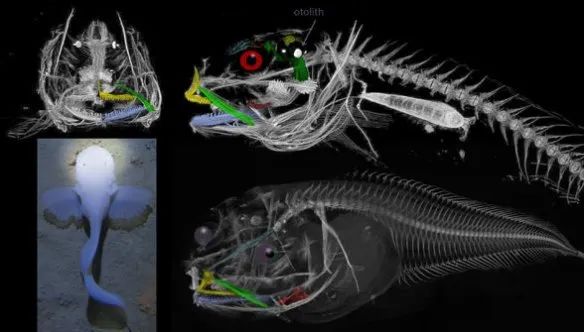
聪明的发育方式,让钝口拟狮子鱼的头骨压力得以均衡。
南海与马里亚纳海沟「挑战赛」
同样地,研究人员决定将机器鱼的「电子大脑」组件隔开,而不是像传统的电子设备那样将电子组件封装在一起,然后用柔软的硅胶将它们封装起来。
经过实验室的模拟和测试表明,这种布局方式减小了高压情况下组件之间界面处的压力,
团队还设计了一个与钝口拟狮子鱼相似的软体,有两个鳍,机器人可以用它在水中推动自己。(但实际上,钝口拟狮子鱼并不会扇动鳍,而是像蝌蚪一样扭动身体)。
为了测试机器人在实验室中的游动性能,研究人员首先在压力水腔中进行了试验,将机器人连接到一根杆子上,并绕一圈游动。
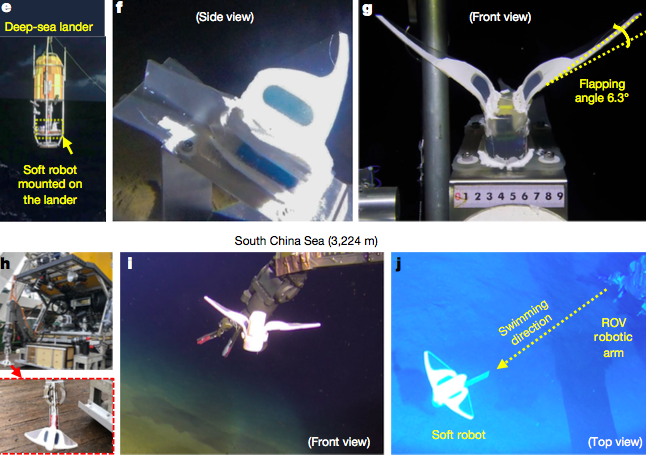
然后在70米深的湖泊中进行了测试,机器人能够以3.16厘米/秒的速度自由游动,又在中国南海以3200 m的深度自由游动。它达到了5.19 厘米/秒的速度(相当于每秒0.45体长)。

结果证明,在游动性能上,它不输其他软体机器人。
深海测试截图
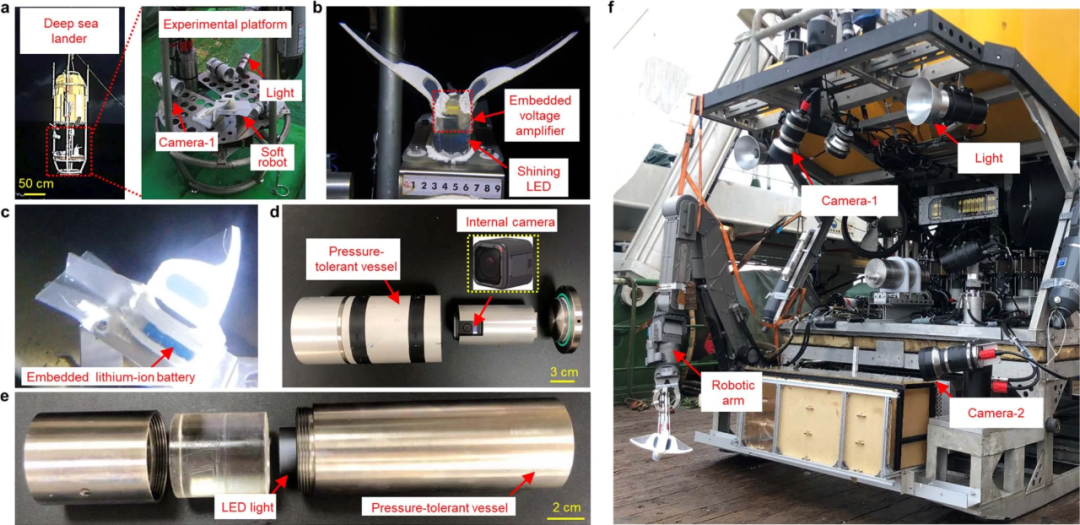
最后,在马里亚纳海沟(北纬11.33°,东经142.19°,深度10,900 m)测试了机器人的拍打运动和压力阻力,将软体机器人安装在深海着陆器上。
实验过程由具有压力容器保护的摄像机和led灯记录。
软体机器人具有嵌入式高压放大器和25mAh锂离子电池,可以产生0.5Hz的7kV,8kV和9kV的激励交流电压。
最终结果显示,在没有压力容器的情况下,机器鱼扑鳍驱动保持了 45 分钟。
深海挑战成功。
关键的设计:压力弹性电子元件
总的来说,机器人长约22厘米,从鳍尖到鳍尖的边长为28厘米。所有的电子元件都被放在了机器人身体中,从它的身后,我们可以看到一条和身体差不多长的尾巴。
鱼的「肌肉」位于鱼体和鱼鳍的交界处,它的收缩会使鱼鳍相对于鱼体向下拉。

「肌肉」由能将电能转换成机械功的材料构成,并固定在散热片上。
每侧都有两个大鳍,其前缘由较硬的材料制成可以上下弯曲,上面还附着一层薄薄的柔性薄膜,帮助它提供推进力。
但研究人员还要面临一个重大挑战:保护机器人的电子组件免受高压侵害。
在机械驱动部分,研究的一个关键材料——DE(介电弹性体),成为了机器鱼游动的关键。
DE能够将电能转化为机械能,当来自机器人电池的电流施加到肌肉时,它们就会收缩,而在硅树脂中的分布布置可以保护它们免受高压的影响。
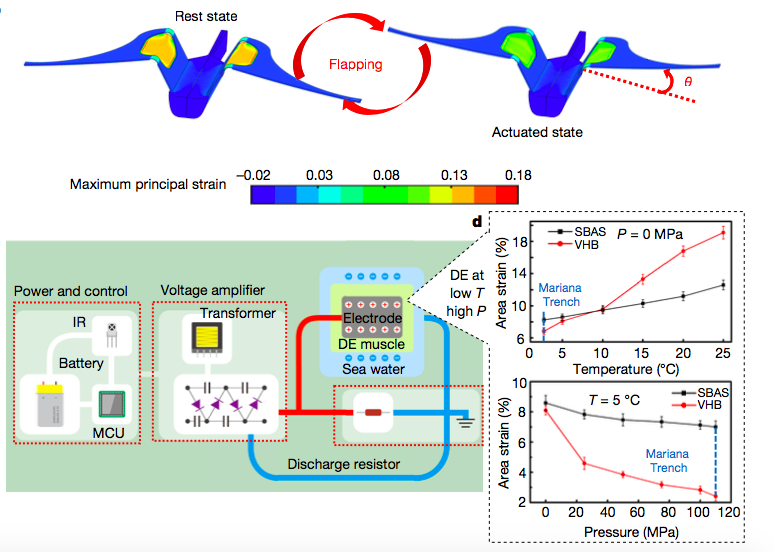
弹性框架粘在预拉伸的 DE 肌肉上,以提供支撑,并将 DE 膜的平面内驱动转换为鳍拍打运动,当施加交流电压时,周期性变形的 DE 肌肉产生两个鳍的拍打运动以推进游动
但在寒冷的高压环境下,这种反应并没有下降多少,稳定在7%。虽然不是很好,但仍足以驱动机器人的鳍。
于是,研究人员对该机器人进行了模拟测试。
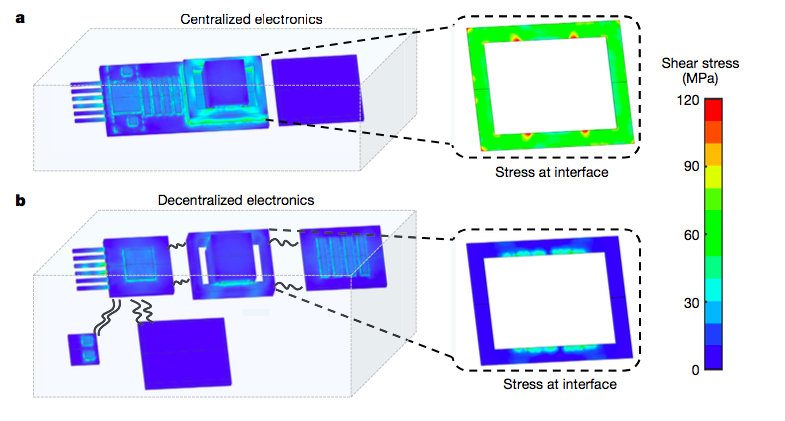
在110MPa压力下,有限单元法 (Finite element method)集中式电子装置的界面剪切应力集中情况,以及变压器周围应力的放大图。
而与集中式相比,分散式电子器件的界面应力有所减轻。
然而,从PCB(印刷电路板,Printed circuit board)上分离所有的组件是技术上的困难,由于它们的数量很大。为了减少这些元件之间的应力,研究人员增加了相邻电子元件之间的距离,并将其称为「距离」。
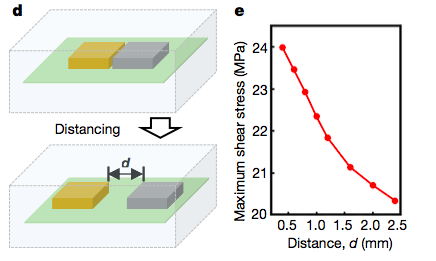
经过测试得知,当相邻元件之间的距离从0.4毫米增加到2.4毫米时,最大剪应力减少了17%。
对此,新加坡国立大学的机器人学家Cecilia Laschi和英国林肯大学的Marcello Calisti评价道,这台机器「推动了生物启发的软机器人所能实现的极限」。
无限的探索:发现不为人知的世界
众所周知,深海海沟充满了微生物生命,它们乐于以大量的有机物质为食--从藻类到动物尸体--这些有机物质找到了通往海底的道路。
微生物的活动表明,这些海沟可能在地球的碳循环中发挥了重要作用,而碳循环又与地球的气候调节有关。

科研人员的研究有了实质性的突破:用嵌入到材料中的分布式的电子设备代替了传统有刚性保护罩的电子设备,为新一代的深海勘探者铺平了道路。
但是,目前也还有许多困难需要克服。这款机器人比以前报道的水下机器人慢,而且不能承受很大的洋流干扰。
从长远发展来看,可以预测出未来海洋生物学的研究途径。
软体机器人可以安全自如地在珊瑚礁或者洞穴中航行,还有一些能够在海床上爬行,将自己锚定在特定的结构或区域中,帮助科研人员探索更广更深的海洋未知处。
参考资料:
https://www.sciencenews.org/article/new-soft-robot-snailfish-crushing-pressures-deep-ocean
https://www.nature.com/articles/s41586-020-03153-z
https://www.nature.com/articles/d41586-021-00489-y
