
相位偏折术原理概述
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

测量自由面型的镜面物体时,干涉法所需要的光学补偿原件制作复杂且昂贵; 回程误差,干涉法很难快速标定; 测量环境苛刻,不适合干涉法测量,因为轻微抖动、温度变化,会给测量记过带来很大误差;
标定相机,以及屏幕、相机位置关系 使用屏幕投影条纹(结构光使用投影仪) 解码获取表面梯度(结构光直接获取高度) 梯度积分获取高度信息
单相机PMD系统如图1所示,系统由LCD显示屏、CCD相机和计算机组成:
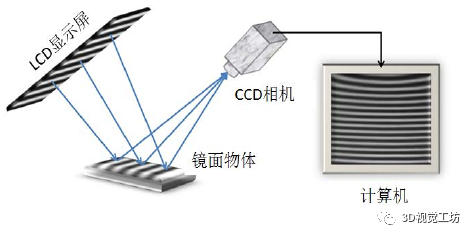
显示屏显示计算机生成的结构光条纹; 相机通过待测镜面表面拍摄显示屏上条纹的镜像; 如果镜面表面不平整的话,则拍摄到的条纹会产生相应的变形;
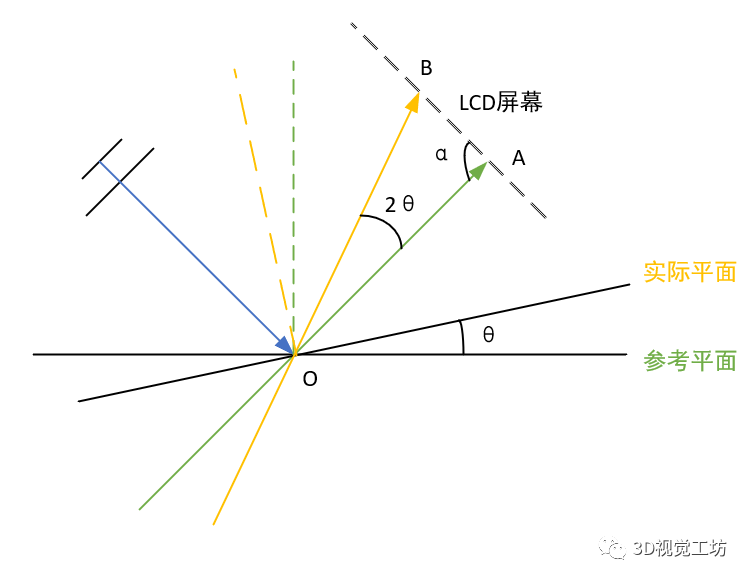
近似条件:我们认为,待测物体的高度要远小于,在点处待测镜面和参考面位置的高度点是完全一致的,忽略了这部分误差,认为相位仅仅与镜面表面梯度相关。
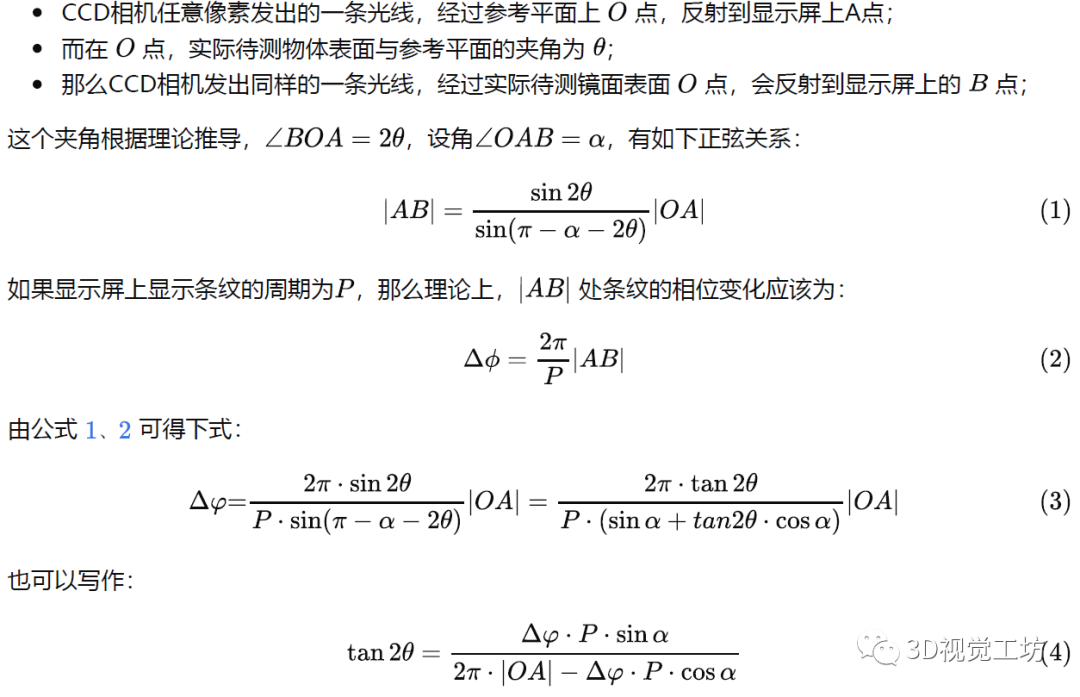
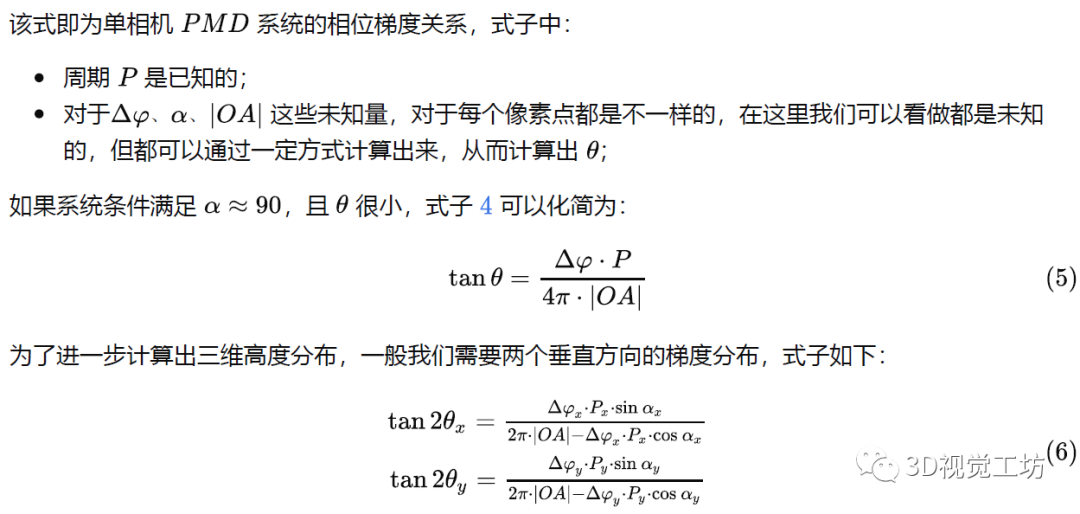
相位的获取原理跟结构光相类似 根据相位获取梯度 在获取了梯度之后,对 x,y方向分别沿路径进行积分
说明:这篇文章目的仅仅是对相位偏折术的核心原理做个概略性的介绍,完整的推导并未介绍,更多的细节请查看相关论文。
相比较来说,PMD有以下优势:
对系统随机误差不敏感,因为积分的累积效应,使得随机噪声在积分过程中被很大程度抑制。 获得更准确的曲率信息: 计算曲率是检测面形缺陷的重要手段,梯度测量法仅仅需要对获得的梯度求一阶导数就可以获得曲率; 而直接的高度测量方法则要二阶导数才能获得曲率,计算二阶导数会丢失更多的信息,计算得到的曲率较为不准确;
只能测量连续的镜平面; 积分过程引入误差;
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论