
终于有人把ROS机器人操作系统讲明白了
导读:机器人是多专业知识交叉的学科,通常涉及传感器、驱动程序、多机通信、机械结构、算法等,为了更高效地进行机器人的研究和开发,选择一个通用的开发框架非常必要,ROS(Robot Operating System,机器人操作系统)就是流行的框架之一。
官网:www.ros.org 源码:github.com Wiki:wiki.ros.org 问答:answers.ros.org
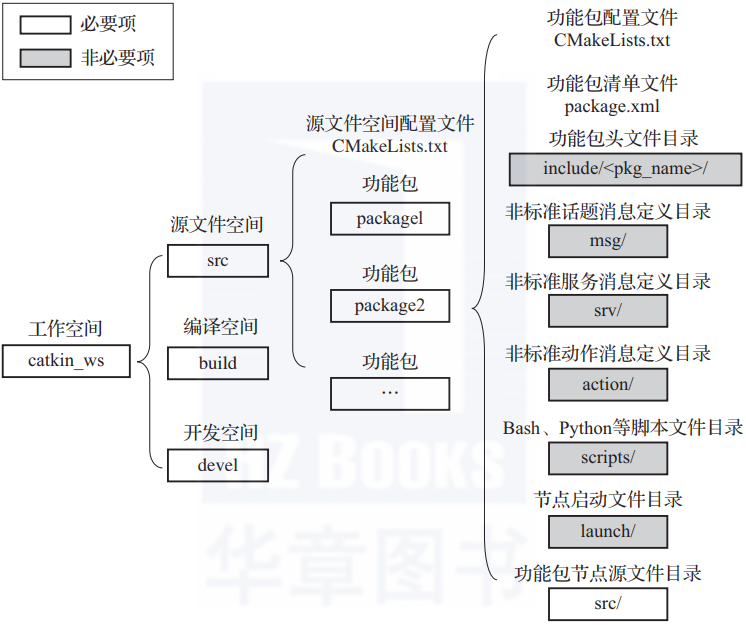
src文件夹放置各个功能包和配置功能包的CMake配置文件CMakeLists.txt。这里说明一下,由于ROS中的源码采用catkin工具进行编译,而catkin工具又基于CMake技术,所以我们在src源文件空间和各个功能包中都会见到一个CMake配置文件CMakeLists.txt,这个文件起到配置编译的作用。 build文件夹放置编译CMake和catkin功能包时产生的缓存、配置、中间文件等。 devel文件夹放置编译好的可执行程序,这些可执行程序是不需要安装就能直接运行的。一旦功能包源码编译和测试通过后,可以将这些编译好的可执行文件直接导出与其他开发人员分享。
CMakeLists.txt是功能包配置文件,用于编译Cmake功能包编译时的编译配置。 package.xml是功能包清单文件,用xml的标签格式标记该功能包的各类相关信息,比如包的名称、开发者信息、依赖关系等,主要是为了使功能包的安装和分发更容易。 include/<pkg_name>是功能包头文件目录,可以把功能包程序中包含的*.h头文件放在这里。include目录之所以还要加一级路径<pkg_name>是为了更好地区分自己定义的头文件和系统标准头文件,<pkg_name>用实际功能包的名称替代。不过这个文件夹不是必要项,比如有些程序没有头文件。 msg、srv和action这三个文件夹分别用于存放非标准话题消息、服务消息和动作消息的定义文件。ROS支持用户自定义消息通信过程中使用的消息类型。这些自定义消息不是必要的,比如程序只使用标准消息类型。 scripts目录存放Bash、Python等脚本文件,为非必要项。 launch目录存放节点的启动文件,*.launch文件用于启动一个或多个节点,在含有多个节点的大型项目中很有用,为非必要项。 src目录存放功能包节点所对应的源代码,一个功能包中可以有多个节点程序来完成不同的功能,每个节点程序都可以单独运行。这里src目录存放的是这些节点程序的源代码,你可以按需创建文件夹和文件来组织源代码,源代码可以用C++、Python等编写。

划重点👇
干货直达👇
评论