
点特征直方图
平面的法向矢量是垂直于平面的单位矢量,并且表面上某个点的法向矢量定义为垂直于与曲面相切的平面的矢量。检测点的法线向量的计算主要包括基于表面网格的求解方法和基于周围邻域中的点的分布的求解方法。
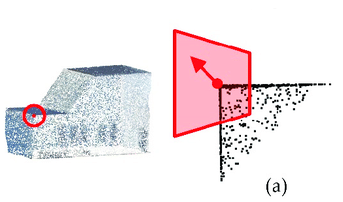
用于正常估计的不同区域
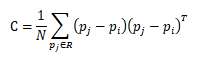
法线向量所在的轴是邻域分布的最分散方向。假设距N个检测点的距离的半径位于r的附近,则相邻点与查询点p_i之间的协方差矩阵为:
点特征直方图(PFH)通过使用围绕点的多维直方图的平均曲率来编码点的k个最近邻点的几何特性。这个高维空间提供了一些有用的特征表示,并且可以应不同采样密度和噪声。
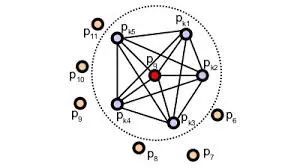
PFH的影响范围
半径为r的球体内的中心点及其所有相邻点相互连接以形成网络。最终的PFH几何特征将是通过计算邻域中所有对点之间的变化关系而获得的直方图。
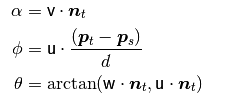
为了计算给定两个点和,pi和pj以及它们相关的法线ns和nj两者之间的相对差,我们在特定点处定义了固定坐标系。
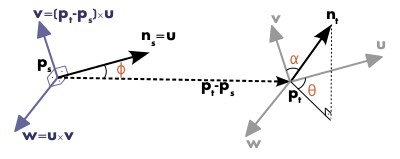
使用上面的uvw坐标系,可以将ns法线和ni法线之间的差分解为以下3个角度差
首先,对于每个点,使用类似于PFH的方法来计算三元组,并获得简化的点特征直方图,称为SPFH。
使用加权的邻近SPFH来计算直方图的最终值,如下所示:

参考文献
Rusu R B, Marton Z C, Blodow N, et al. Learning informative point classes for the acquisition of object model maps[C]//Control, Automation, Robotics and Vision, 2008. ICARCV 2008. 10th International Conference on. IEEE, 2008: 643–650
Zhao X, Wang H, Komura T. Indexing 3d scenes using the interaction bisector surface[J]. ACM Transactions on Graphics (TOG), 2014, 33(3): 22.
Wahl E, Hillenbrand U, Hirzinger G. Surflet-pair-relation histograms: a statistical 3D-shape representation for rapid classification[C]//3-D Digital Imaging and Modeling, 2003. 3DIM 2003. Proceedings. Fourth International Conference on. IEEE, 2003: 474–481.
Rusu R B, Blodow N, Beetz M. Fast point feature histograms (FPFH) for 3D registration[C]//Robotics and Automation, 2009. ICRA’09. IEEE International Conference on. IEEE, 2009: 3212–3217.
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~