
【机器视觉】3D抓取—基于模板匹配
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
转自|牙牙的无为生活
基于模板匹配方法
已知物体模型,从不同方向提取RGBD特征,处理生成模板与实际图像每个位置进行匹配,匹配成功得到目标的位姿信息。
2011Linemod经典鼻祖论文:Multimodaltemplates for real-time detection of texture-less objects in heavily clutteredscenes(Linemod)
2012改进Linemod:Gradient Response Maps for Real-Time Detection of Texture-Less Objects
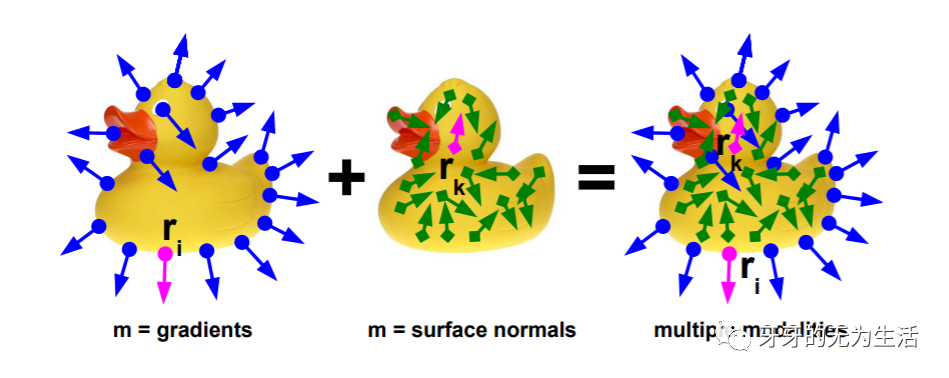
左:可辨别的图像梯度主要在轮廓上找到。梯度位置粉红色显示
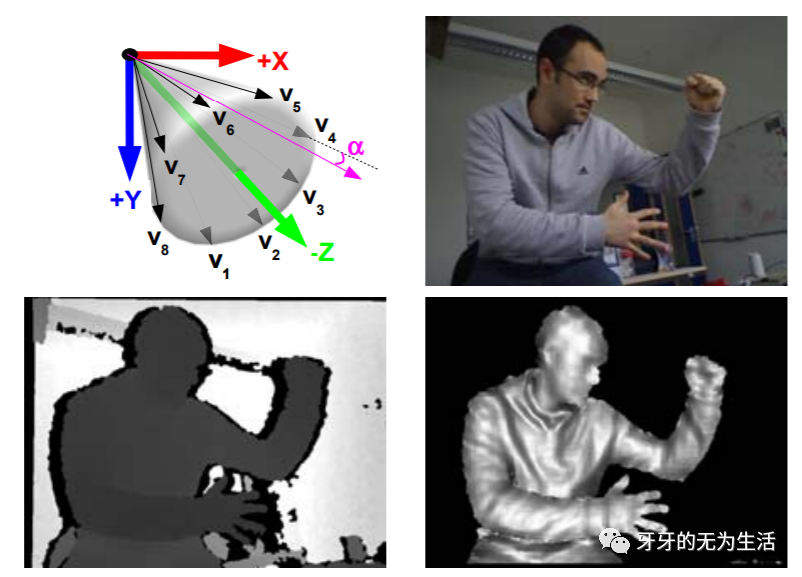
中:深度传感器获取的表面法向量
右:2D图像梯度和3D表面法线的组合->增加鲁棒性
视觉提示的互补性:梯度通常在物体轮廓上找到,而在物体内部找到曲面法线
研究方向与问题:复杂背景下3D物体的实时检测与定位
依据:采用彩色图像的梯度信息结合物体表面的法向特征作为模板匹配
算法场景:复杂场景、无纹理、多模板
应用:opencv封装((参考2中有函数解释)),基于ros的object recognition kitchen中有配套的模型生成图像的程序、ICP后处理的教程跟代码
算法流程:
(1)概念性
一个模板是一个特征点序列(多模态时为多个序列),特征点彼此不能太近且要有足够的代表性。
输入RGBD数据
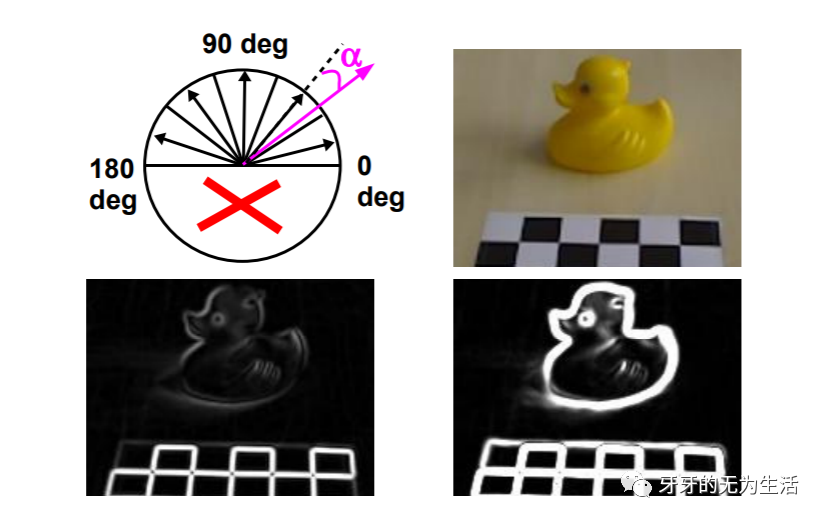
(2)计算梯度方向
以彩色梯度为例,先进行7*7的高斯模糊,然后利用Sobel算子计算梯度,继而在每个像素点求解出了梯度方向以及幅值,只有超过一定阈值的梯度才会被保留;
接着在3*3的领域内统计梯度的方向,数量超过5的梯度方向才会被采用;
此处梯度方向都是无符号的,只取上一半,Opencv实现的代码里分为8个方向(量化为5)。这种提取特征的方式对于梯度起到了主成分提取和放大的效果。
经过训练生成文件信息。
(3)方向扩散
对被搜索图像(原图)也要进行梯度的计算,并且对梯度的方向做方向的拓展。
继而利用模板进行滑窗匹配时就有了一定的容错度,匹配容错。
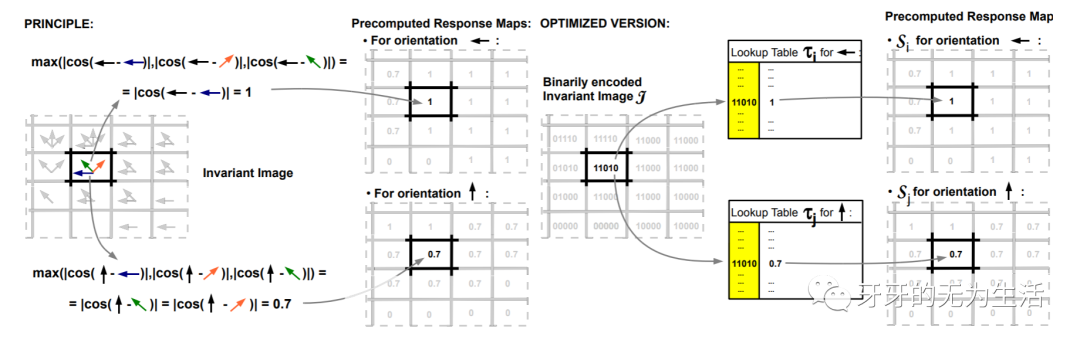
(4)预处理响应图
制作查找表,算法匹配速度快;
针对n(=8)个方向和方向扩散图逐个像素进行匹配,匹配的结果是距离最近方向角度的余弦值;
值得注意的是,虽然这里有八个方向,但是夹角只有五种情况(算的直线夹角而非射线),故而匹配的结果只有五种;
响应图是被搜索图(原图)各个位置下对应扩展方向的二进制表示,模板图像共有5个方向,那么相应生成5张响应图Response Maps,利用模板进行匹配,可以直接调用对应方向在对应像素的结果,避免了滑窗时重复的计算。
(5)线性存储
避免重复计算,加速计算

(6)扩展深度图
实际应用中的问题
遮挡场景无法处理
改进与优化
linemod存在两个问题,一个对尺度变化敏感,一个遮挡情况下效果变差。【3】改进详见6D pose(见方法3)。
参考
【1】https://blog.csdn.net/zmdsjtu/article/details/79933822
【2】https://blog.csdn.net/qq_36537774/article/details/89354339?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-0.control&spm=1001.2101.3001.4242
【3】https://zhuanlan.zhihu.com/p/35683990
【4】https://blog.csdn.net/ALZFterry/article/details/108694869
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
—THE END—