
常用 Normalization 方法的总结与思考:BN、LN、IN、GN

来源:机器学习算法那些事 本文约2700字,建议阅读6分钟 本文为你介绍常用 Normalization 方法的总结与思考。
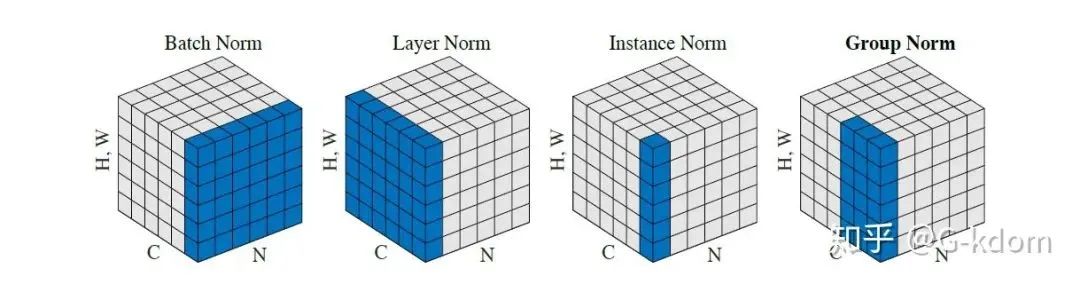
每个子图表示一个特征图,其中N为批量,C为通道,(H,W)为特征图的高度和宽度。通过蓝色部分的值来计算均值和方差,从而进行归一化。
 比喻成一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 有W 个字符。
比喻成一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 有W 个字符。1. BN 求均值时,相当于把这些书按页码一一对应地加起来(例如第1本书第36页,第2本书第36页......),再除以每个页码下的字符总数:N×H×W,因此可以把 BN 看成求“平均书”的操作(注意这个“平均书”每页只有一个字),求标准差时也是同理。
一、 Batch Normalization, BN
论文链接:https://arxiv.org/pdf/1502.03167.pdf
沿着通道计算每个batch的均值

沿着通道计算每个batch的方差

做归一化
加入缩放和平移变量
 和
和

 。加入缩放和平移变量的原因是:保证每一次数据经过归一化后还保留原有学习来的特征,同时又能完成归一化操作,加速训练。 这两个参数是用来学习的参数。
。加入缩放和平移变量的原因是:保证每一次数据经过归一化后还保留原有学习来的特征,同时又能完成归一化操作,加速训练。 这两个参数是用来学习的参数。二、 Layer Normalization, LN
论文链接:https://arxiv.org/pdf/1607.06450v1.pdf
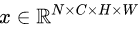
 ,LN 对每个样本的 C、H、W 维度上的数据求均值和标准差,保留 N 维度。其均值和标准差公式为:
,LN 对每个样本的 C、H、W 维度上的数据求均值和标准差,保留 N 维度。其均值和标准差公式为:
三、 Instance Normalization, IN
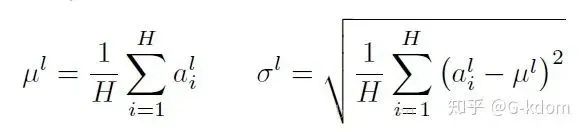
 ,IN 对每个样本的 H、W 维度的数据求均值和标准差,保留 N 、C 维度,也就是说,它只在 channel 内部求均值和标准差,其公式如下:
,IN 对每个样本的 H、W 维度的数据求均值和标准差,保留 N 、C 维度,也就是说,它只在 channel 内部求均值和标准差,其公式如下:
四、 Group Normalization, GN
 的均值和方差,这样就与batch size无关,不受其约束。
的均值和方差,这样就与batch size无关,不受其约束。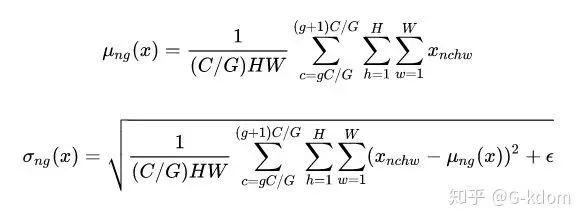
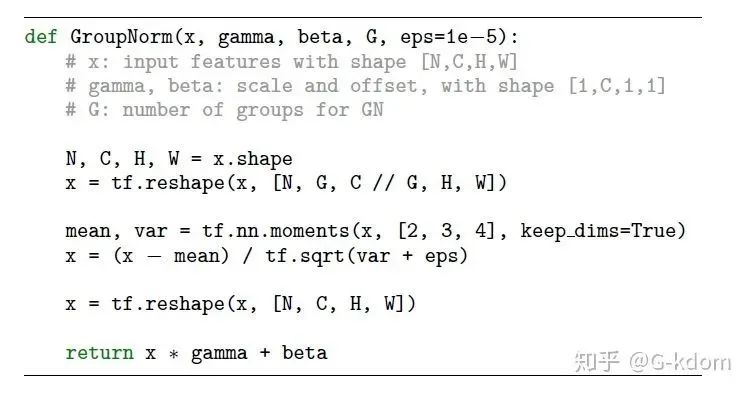
def GroupNorm(x, gamma, beta, G=16):# x_shape:[N, C, H, W]results = 0.eps = 1e-5x = np.reshape(x, (x.shape[0], G, x.shape[1]/16, x.shape[2], x.shape[3]))x_mean = np.mean(x, axis=(2, 3, 4), keepdims=True)x_var = np.var(x, axis=(2, 3, 4), keepdims=True0)x_normalized = (x - x_mean) / np.sqrt(x_var + eps)results = gamma * x_normalized + betareturn results
总结
 比喻成一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 有W 个字符。
比喻成一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 有W 个字符。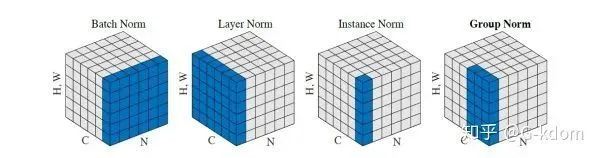 和的区别:对于 BN,IN,GN, 其和都是维度等于通道数 C 的向量。而对于 LN,其和都是维度等于 normalized_shape 的矩阵。
和的区别:对于 BN,IN,GN, 其和都是维度等于通道数 C 的向量。而对于 LN,其和都是维度等于 normalized_shape 的矩阵。编辑:于腾凯
校对:林亦霖
评论