
无脑”机器人穿越迷宫是怎样实现的?
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
机器人穿越迷宫是计算机科学领域的一个经典问题,它涵盖了机器人的导航、路径规划和决策等多个方面。
在软机器人领域,自主迷宫导航对于探索先验未知的非结构化环境来说很有吸引力,但也具有挑战性,因为它通常需要类人的大脑,集成机载电源、传感器和控制以实现计算智能。
然而,你是否听说过一种无需人类指引也无需计算机指导便能穿越简单迷宫的机器人?
近日,《科学进展》期刊上刊登了一篇题为“物理智能自主软机器人迷宫逃生者”研究报告,介绍了一种智能软体机器人。

这种机器人具有独特的本领,能够在不需要类人的大脑和计算机指引的前提下,从多通道迷宫、沙地迷宫、出口比软机器人身体尺寸更窄的迷宫、具有原位变化布局的动态迷宫等不同具有挑战性的迷宫中自我逃脱。
那么,这种智能软体机器人究竟是如何实现自我逃脱的呢?接下来,和机器人大讲堂一同深入了解这个问题吧!
▍自导航混合螺旋 LCE 带状软机器人
通常来讲,软体机器人自主性的实现主要包括两种途径。
一种常见的方法是依靠集成车载电源[例如电池、气泵或压缩气体储罐 ]、控制装置 [例如微控制器]、机械逻辑阀、传感器[例如压力或触觉传感器 ],以实现可控的致动和运动。
另一种策略则是使用远程磁或光响应驱动来控制不受束缚的软机器人运动,但这种方法需要外部协助来操纵磁场或光源来引导机器人被动运动,软体机器人无法实现完全自主化运动。
当然,也有研究人员曾提出利用液晶弹性体、水凝胶、尼龙纤维等可以吸收周围环境的热量或光,且可执行滚动、爬行、游泳等简单定向自主运动的热响应活性材料制成软体机器人的想法。但受限于智能性的缺乏和有障碍复杂非结构化环境的无法自我适应,以该想法为基础的机器人样本此前仍处于不成熟阶段,需就自主性提升进行进一步探索。
近日,北卡罗来纳州立大学的研究人员提出一种设计自主智能软体机器人的物理智能(PI)的替代范式,即通过利用智能材料的材料智能和新颖结构设计的机械智能来实现自我感知、驱动、控制、适应和决策,无需外部计算或传感器,并在此基础上制造了一种自导航混合螺旋 LCE 带状软机器人,可以在复杂的非结构化受限环境(例如多通道迷宫)中自主机动,且无需人工干预或外部控制。
据了解,该机器人是该团队在去年研制的液晶弹性体(LCE)螺旋自主智能机器人基础上进行升级的版本(Proc. Natl. Acad. Sci. U.S.A. 119, e2200265119,2022),主要由一种可以吸收热源而转化为自身动能的智能材料液晶弹性体构成,可以从环境中收集热能,用于自供电滚动、自转向和自避障。

当机器人放置在温度至少为 55° 摄氏度(131°华氏度)的表面(比周围空气更热)时,色带接触表面的部分会收缩,而色带暴露在空气中的部分则收缩,并呈不对称圆锥扭曲形状。不对称的形状的智能材料使得软体机器人在遇到墙壁时能够主动自我转动并自我反射其运动以逃离迷宫。
但由于此前版本的机器人缺乏主动和持续的自我转向能力,因此只能在同一地点的两个墙之间来回弹跳,被困在两个平行墙组成的简单有限空间(典型迷宫中的典型场景)中。
为了解决机器人在处理更复杂的非结构化环境时仍然存在巨大的局限,赋予机器人逃离迷宫所必须满足的基本策略和要求,研究人员选择弃用此前版本的对称设计,尝试为机器人赋予主动自转向能力、路径自调整能力、试错搜索能力。
新机器人有两个不同的半部。机器人的一半形状像一条沿直线延伸的扭曲丝带,而另一半形状像一条更紧密扭曲的丝带,也像螺旋楼梯一样围绕自身扭曲。由于其不对称设计,新机器人无需接触物体即可转动。当接触到物体时,新机器人可以改变方向,进而实现在迷宫中导航。
实验中,研究人员久新软机器人穿越更复杂的迷宫(包括具有移动墙壁的迷宫)并适应比其身体尺寸更窄的空间进行了展示,并在金属表面和沙子上测试了新的机器人设计。
▍自主逃离迷宫
基于自滚动带中未发现的主动自转动机制,研究人员利用其智能自逃能力从复杂的有限空间中,例如热表面(120°C)上具有不同复杂程度的通道迷宫。通道迷宫是通过在矩形有限空间中添加一些隔断墙而构建的,出口位于右下角。隔断墙的设计目的是创建一定数量的小通道子空间,这些子空间可能会将新软机器人困在里面并增加自我逃逸的难度。壁之间的距离设置为大于样本(新软机器人)长度,以允许其在内部自动滚动。每个样本(新软机器人)被随机放置在距离出口至少3次的通道中,以测试它们的自逃能力,记录它们的运动轨迹和逃逸持续时间。
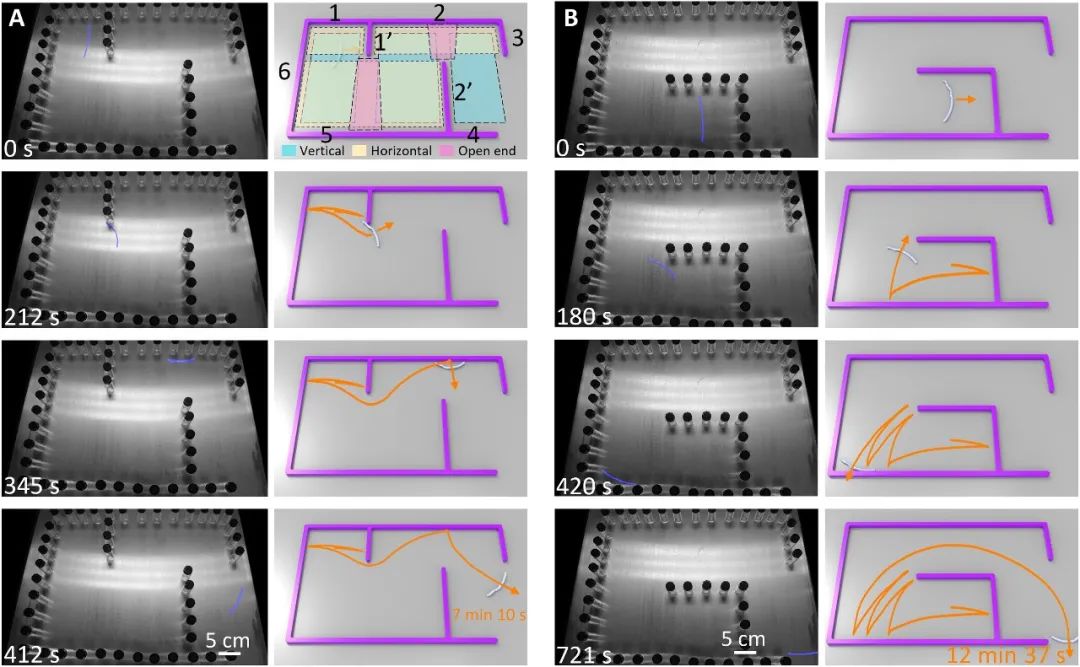
图 . 机器人从简单迷宫中自我逃脱,在热表面上有两个隔墙的两种不同布局。
(A和B)在迷宫中自我逃脱时选择的延时图像,迷宫有两个平行的隔墙(A)和两个由对齐的玻璃瓶制成的直角墙(B)。在 (A) 中,两个隔断墙将迷宫分为六个水平(黄色)和垂直(蓝色)通道子空间,以潜在地捕获新软机器人。出口位于右下角。起点是在远离出口的地方随机选择的。右栏显示了相应的实验轨迹示意图。热表面温度为120°C
首先,研究人员从简单的迷宫开始,具有较少的隔墙(例如,内衬玻璃瓶或薄木板)和较少的通道。图(A 和 B)展示了热表面(120°C)上的简单迷宫的三种设计,其中两个隔墙分别平行放置、L形放置和彼此垂直放置。对于所有三种设计,两个隔断墙将矩形有限空间划分为总共六个水平(“=”)和垂直(“||”)通道子空间,由两个平行的面对墙形成,没有任何分隔物,标记为图中的黄色和蓝色区域。例如,对于图A中的设计,它有三个“||” 由一对编号的垂直壁 6-1'、6-2' 和 1'-3 形成的通道子空间以及由水平壁 1-5、2-5 和 2-4 组成的三个“=”通道子空间。
此外,在1'和2'的分隔壁的开口端与5和2的相对壁之间也可能出现类似的电势陷阱,图中用紫色区域标记。正如预期的那样,由于在达到热平衡后失去了主动自转动能力而没有解扭,因此扭曲带和螺旋带很容易通过卡扣和被动转动在壁之间反复来回弹跳而被困在通道子空间内甚至超过2小时,使得自我逃离这三个简单的迷宫非常具有挑战性。
相比之下,对于新软机器人,它的锯齿状弯曲路径在折断前后具有相反的自转向方向,大大增加了逃跑的机会。因此,凭借这种几何不对称引起的连续主动自转向能力,随机放置在三个迷宫不同起始位置的新软机器人总能通过自折断和被动转向相结合找到自我逃生的出路。
根据迷宫的起始位置和设计,其自逃持续时间可能从大约 7 分钟到接近 1 小时不等,轨迹明显简单到复杂(随机放置在三个迷宫不同起始位置的新软机器人,通过结合自动折断和被动转向,总能找到出路并自行逃脱。根据迷宫的起始位置和设计,其自逃持续时间可能从大约 7 分钟到接近 1 小时不等,轨迹明显简单到复杂(随机放置在三个迷宫不同起始位置的新软机器人,通过结合自动折断和被动转向,总能找到出路并自行逃脱。根据迷宫的起始位置和设计,其自逃持续时间可能从大约 7 分钟到接近 1 小时不等,轨迹明显简单到复杂。
▍沙子表面测试
研究人员在更具挑战性的颗粒基质上对新软机器人从简单的迷宫中自行逃脱进行了测试,例如图A热表面(120°C)上的松散沙子。与光滑且坚硬的热表面相比,由于流体状的沙粒,颗粒状基底使得壁面的运动反射很难捕捉。
研究人员发现,扭曲的丝带在靠墙的沙子上自滚时就失去了折断能力,因为它的边界像刀片一样锋利,两端扎入沙子里很容易被卡住,折断非常困难。相比之下,螺旋带和新软机器人的光滑螺旋形状都有助于防止沙钻,从而表现出比扭曲带更好的折断性能,而与刚性表面相比,它需要更长的捕捉时间,为150到250毫秒。
尽管螺旋带保留了折断能力,但由于缺乏持续主动的自转向能力,它无法从沙子上的简单迷宫中自我逃脱。对于新软机器人,在沙子上比在刚性表面上自逃逸需要大约12至50分钟的时间。
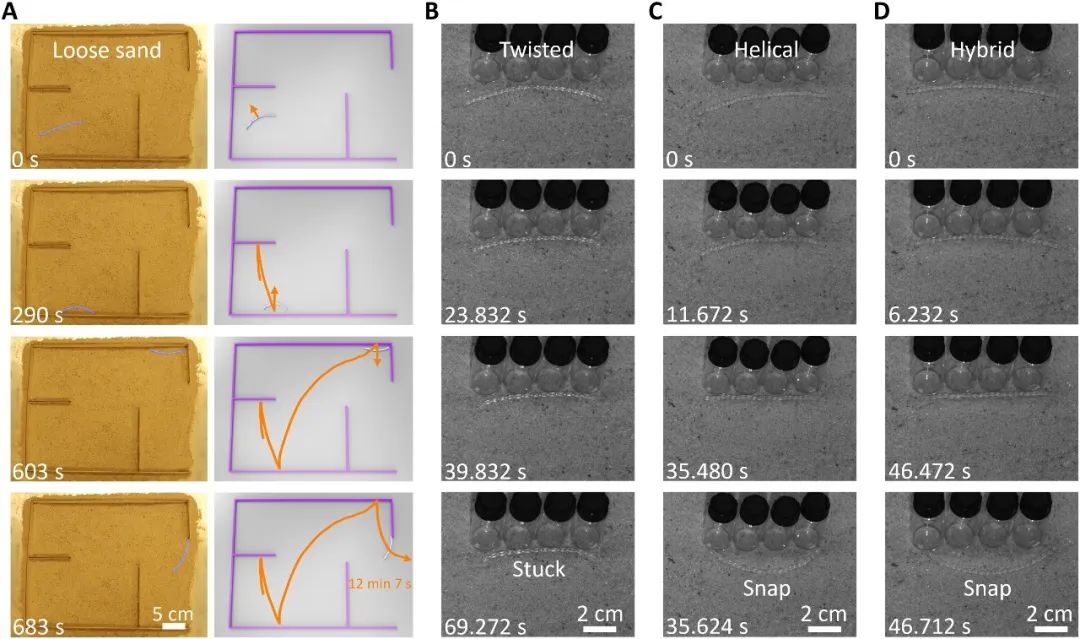
图 . 机器人从松散沙子上的简单迷宫中折断并自我逃脱。
( A ) 在沙子迷宫中自我逃脱时选择的延时图像,迷宫有两个垂直的木板墙。原理图如右图所示。( B ) 扭曲的丝带卡在沙子里,无法弹断。( C和D ) 螺旋 (C) 和混合 (D) 样品在沙子上的突弹过程。热表面温度为120°C。
为了增加迷宫的复杂性,研究人员还在矩形的有限空间中引入了更多数量的分支隔墙(例如六个薄木板墙)。如下图所示,两个复杂的迷宫具有大约11和12个划分的水平和垂直通道子空间,用于潜在地捕获两壁之间的自滚动带。
此外,它创建了隔断墙的五个开放端(下图C中的紫色区域)。开口端将有利于新软机器人的折断和被动自转动,这些开口端进一步增加了通过在两个开口端之间或者在一个开口端与一墙之间来回弹跳而被困的机会,如下图D所示,使得复杂的迷宫更难以逃脱。
实验结果表明,只有新软机器人能够成功逃离两个复杂的迷宫,而其他两条扭曲的螺旋带则被永久困住。下图(E和F)显示了两个复杂迷宫中跟踪的自逃轨迹。需要更长的自逃持续时间(超过 1 小时)才能逃离上述墙壁和开放端墙壁之间的潜在陷阱场景。
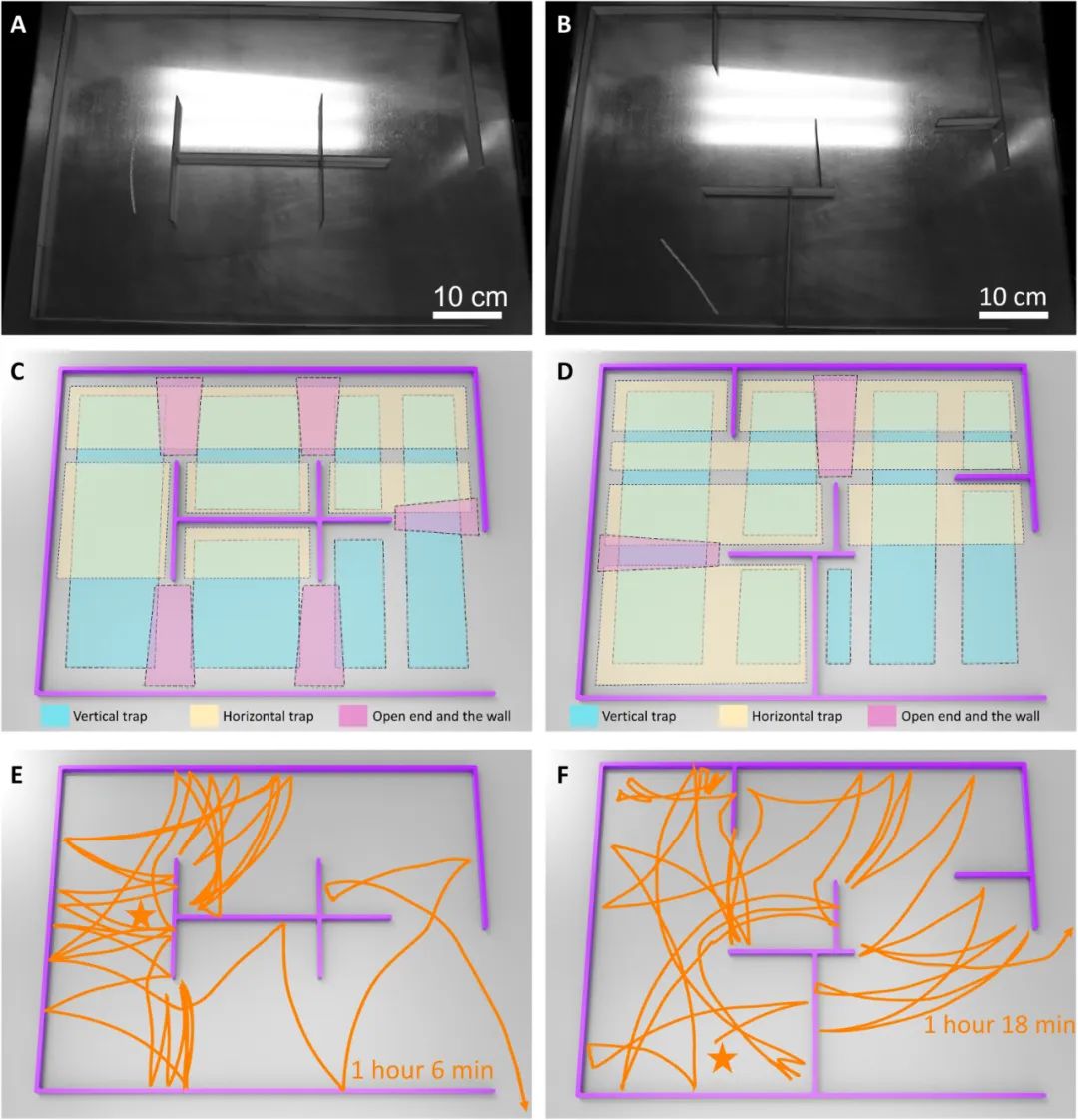
图 . 新软机器人从复杂的迷宫中自我逃脱,在热表面上有六个隔墙的两种不同布局。
( A和B ) 电影 S9 中迷宫 1 (A) 和迷宫 2 (B) 的图像。六个隔墙将两个迷宫分别划分为 9 个和 12 个水平和垂直通道子空间。( C和D ) (A) 和 (B) 中迷宫子空间的组合示意图。( E和F ) 从 (A) 和 (B) 中的出口出发的随机起点(用星号表示)对应的逃逸轨迹。热表面温度为120°C。
▍金属表面测试
为了进一步挑战新软机器人的迷宫逃脱能力,研究人员探索了更困难的场景——分隔壁和出口处都有狭窄间隙的迷宫。为简单起见,研究人员将此场景分解为两个概念验证演示:一个涉及一个简单的封闭矩形围墙空间,具有狭窄的出口间隙(比身体长度小约 28.6%;下图C),另一个具有多通道迷宫墙壁之间有相同大小的狭窄间隙,但出口很宽(下图D)。新软机器人被随机从出口处扔下,并尝试逃跑 3 次。在第一个演示中,它必须依靠捕捉和主动转弯来精确定位并到达出口(即一半以上的身体面向出口),需要相当长的时间(1小时25分钟)和以下由于难度增加,复杂的轨迹(下图E )。在第二个演示中,迷宫由两个由狭窄间隙隔开的窗格组成,并通过水平墙进一步划分。值得注意的是,对于新软器人来说,定位间隙是一项挑战,新软机器人只需要导航几次(位置 1 和 2 一次,位置 3 三次;下图F)。成功逃脱的持续时间在约 30 至约 100 分钟之间变化(下图F、下图F)。
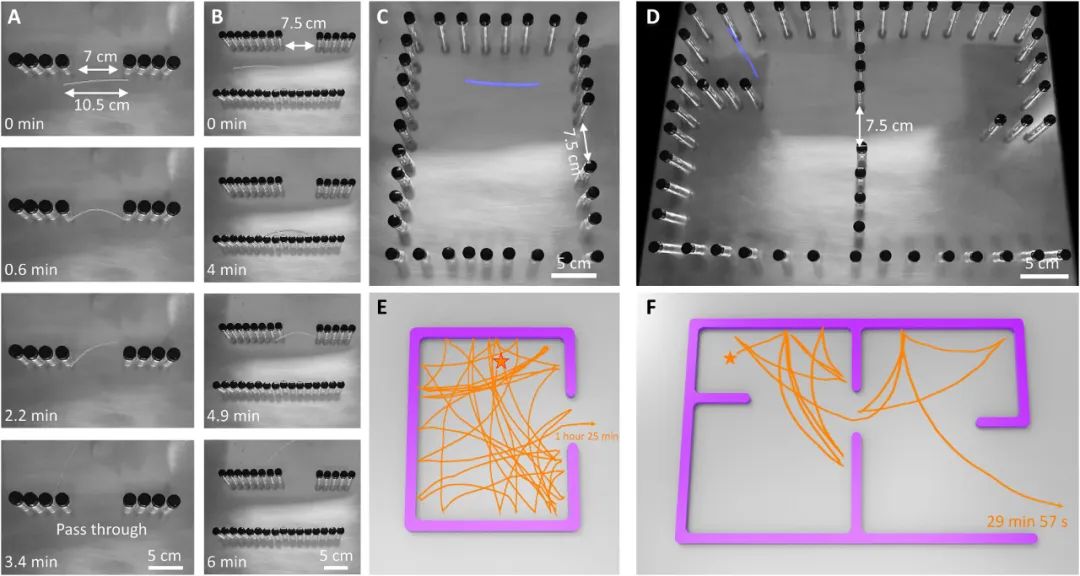
图 . 自我导航穿过简单的密闭空间和间隙狭窄的迷宫。
( A )新软机器人(长,10.5 厘米)穿过狭窄的间隙(宽,7 厘米)。( B ) 新软机器人从具有狭窄间隙的平行有限空间中自行逸出。(C和D)图像:一个封闭的密闭空间,出口处有一个狭窄的间隙(C),中间是一个四室迷宫,中间的墙壁之间有一个狭窄的间隙(D)。( E和F ) 从随机起点(用星号表示)远离 (C) 和 (D) 中出口的相应逃逸轨迹。热表面温度为120°C。
最后,为了进一步证明新软机器人的逃脱多功能性,研究人员引入了一个动态迷宫,其特征是原位改变模式,每 5 分钟在两种不同布局之间切换。(下图A 和 Bi)显示了初始迷宫布局,其中①和③区域开始时是封闭区域,大门关闭,而区域②则有大门打开。5分钟后,转变为下图Bii所示的不同布局,其中①和③区域成为开放区域,大门打开,而②区域则变成封闭区域。
迷宫图案每 5 分钟动态变化一次,无论机器人的瞬时位置如何,迷宫门都会定期打开和关闭。如下图C所示一样,机器人被随机放置在初始封闭区域①中。与之前的静态迷宫不同,这种动态迷宫不仅要求软机器人找到正确的路径,还要准确地计时其运动,这给逃脱过程带来了额外的困难。尽管偶尔会被困在暂时封闭的区域,但新软机器人仍以原地变化的模式成功逃离迷宫,展示了其显着的迷宫逃生能力。
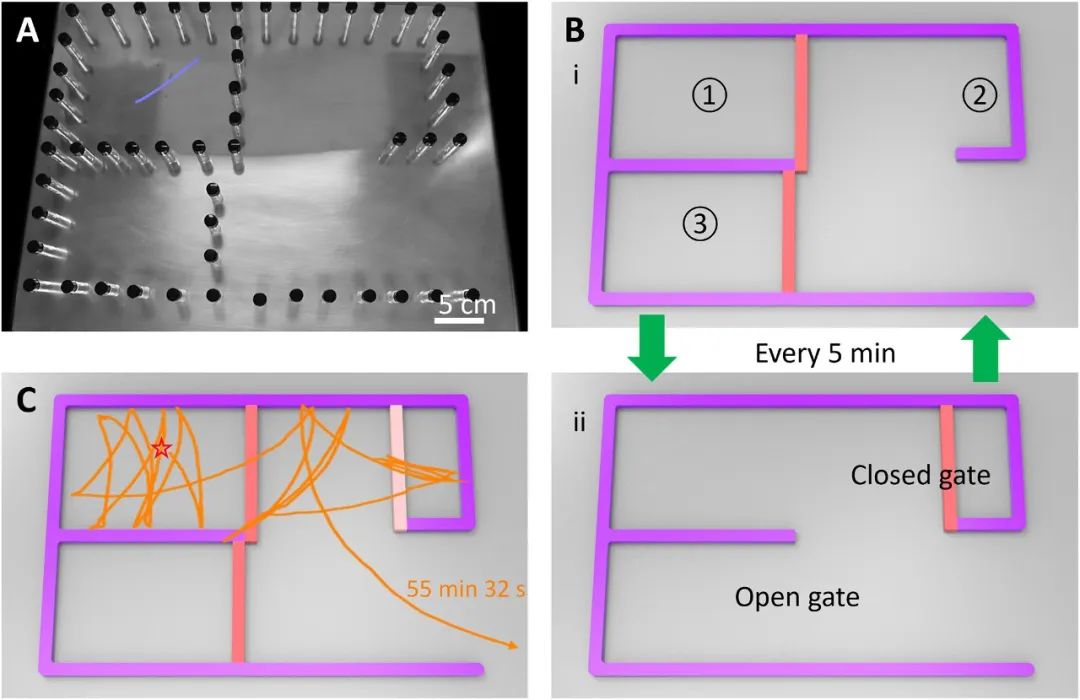
图 . 新软机器人从具有原位变化图案的迷宫中自我逃脱。
( A ) 迷宫初始图案的图像。( B ) 迷宫每 5 分钟改变一次 (i) 和 (ii) 之间的模式。在 (i) 中,区域 ① 和 ③ 中的门(橙色条)关闭,而区域 ② 中的门打开。在(ii)中,门在区域①和③中打开,在区域②中关闭。( C ) 区域①中随机起点(用星号表示)对应的逃逸轨迹。热表面温度为120°C。
▍结语
尽管这项工作填补了重要的知识空白,并解决了研究人员之前基于扭曲 LCE 带状自主软机器人研究的局限性,却同时也仍然存在一些局限性。在测试中设计的复杂迷宫中虽然有许多潜在的陷阱子空间,但它们的复杂性仍然低于具有更复杂路径和墙壁的常规迷宫。
来源:机器人大讲堂
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。