
二次型和矩阵合同原来是这么一回事
在数学中,二次型(Quadratic Form)是指关于变元的二次齐次多项式。例如,
是关于变元
二次型在一元、两元和三元的情况下,被称为 unary,binary 和 ternary,可以写为以下形式,
其中
二次型在许多数学分支,包括数论、线性代数、群论(正交群)、微分几何、微分拓扑和李代数中,占有重要地位。
二次型可以用于表示某些二次曲线。例如,可以表示下图中旋转的椭圆,
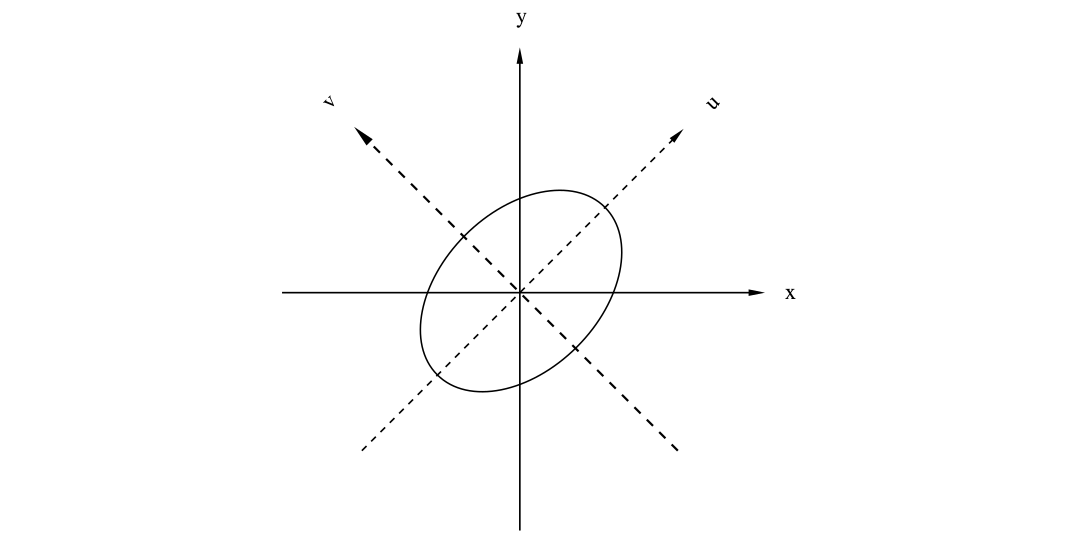
其在
这个例子说明,正确选择坐标系或者基底,通常可以简化方程或者待处理的特定问题。
将
这个方程中两个变元之间独立了,形式干净漂亮。那么给定一个二次型,我们如何得到它的标准型呢?这就是本文要讨论的内容,在正式开始之前,我们先来回顾一下有关二次型的研究背景和简史。
0历史简介
对特定二次型的研究,特别是关于给定整数是否可以是整数上二次形式的值的问题,可以追溯到多个世纪以前。一个这样的例子是关于两个数平方和的问题,即确定何时可以用
公元 628 年,印度数学家 Brahmagupta 撰写的著作中包括对
而对二次型进行系统性研究可以说是从 18 世纪开始的,它起源于对二次曲线和二次曲面的分类问题的讨论,将二次曲线和二次曲面的方程变形,选有主轴方向的轴作为坐标轴以简化方程的形状,这个问题是在 18 世纪引入的。
柯西在前人基础上得出结论: 当方程是标准型时,二次曲面用二次型的符号来进行分类。然而,那时并不清楚,在化简成标准型时,为何总是得到同样数目的正项和负项。西尔维斯特(就是那个首先使用 Matrix 这词的数学家)回答了这个问题,他给出了
另外,在矩阵论的发展史上,德国数学家弗罗贝尼乌斯(Frobenius)取得了很大贡献。1878 年,弗罗贝尼乌斯提出了正交矩阵的正式定义,并讨论了正交矩阵与合同矩阵的一些重要性质。1879 年,他结合行列式引入矩阵秩的概念。弗罗贝尼乌斯还整理和扩展了魏尔斯特拉斯关于不变因子和初等因子的理论工作。
1二次型的定义
矩阵出现之前
所谓二次型,就是系数在一定数域上的齐次多项式,并且是二次多项式。在矩阵的概念提出之前,可以用下面的形式来定义。
设
称为数域
例如,
就是有理数域上的一个三元二次型。
用矩阵的形式定义
对于向量
的标量函数被称为二次形式。当
注意二次型的公式里有个转置
此时,我们再看上面的那个三元二次多项式,
可以将上面二次型用矩阵表示,
然而,由于
假设给定矩阵
而
二次型的对角化
当
每个二次型
这是因为
以及,
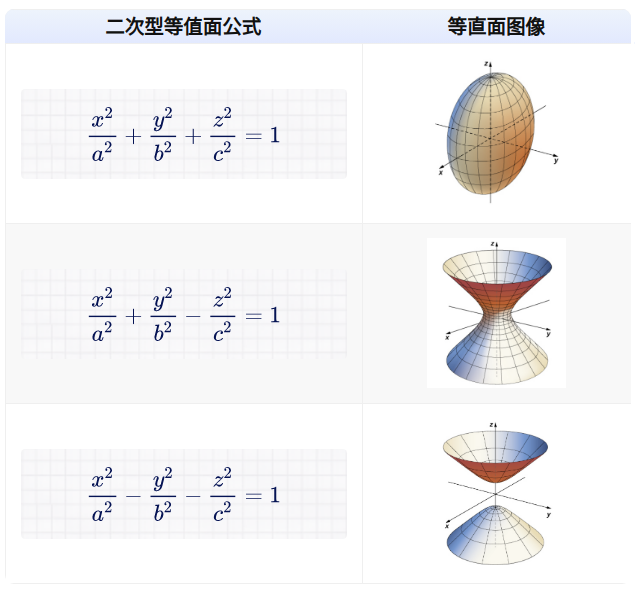
这表明二次型的性质由对称矩阵 标准型。如果
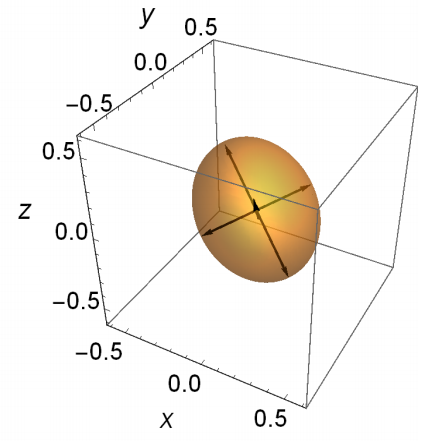
例如,上图就对应了如下二次型,
需要注意的是,二次型的对角化并不一定要通过矩阵的特征分解来实现,这里不需要正交,只需要非奇异,因此也可以通过其他分解来实现。
实际上,不必通过求解特征值问题来对角化二次型,因为可以使用基于非奇异矩阵
这种分解计算起来相对来说更加方便,并且对角矩阵
令
最终得到的二次型称为标准型,如果系数为正负 1,则称为规范型。
合同(Congruence)
没有查到这词是谁翻译的,现代人看到合同两字,可能会想这两个矩阵是在做生意吗?
Congruence 这个词在数学中多次出现,在几何中称全等,算术中称作同余,总之它可以用于表示一种等价关系。
矩阵的合同不需要对称,是满足如下性质的一种等价关系,
反身性: 任意矩阵都与其自身合同; 对称性: 合同于 ,则可以推出 合同于 ; 传递性: 合同于 , 合同于 ,则可以推出 合同于 。
合同矩阵的秩相同,矩阵合同的主要判别法:
设 , 均为复数域上的 阶对称矩阵,则 与 在复数域上合同等价于 与 的秩相同。 设 , 均为实数域上的 阶对称矩阵,则 与 在实数域上合同等价于 与 有相同的正、负惯性指数(即正、负特征值的个数相等)。
可以这么理解: 两个实对称矩阵合同,当且仅当它们是在各自基底下表示同一个二次型。
西尔维斯特惯性定律
实对称矩阵
令
西尔维斯特惯性定律指出,对于实对称矩阵,
西尔维斯特提出该惯性定律时并没有证明,下面我们用后来提出的理论来简要证明一下,如果对证明兴趣不大可以跳过此节。
证明
1. 先证必要性
如果
因为如果
是
令,
那么,
令
如果
为了得到
因此,存在一个非零向量
以及
矛盾。
因此,
以上证明了,如果
2. 再证充分性
反过来,如果
惯性指数举例
与双线性形式的关系
与二次型
因此,
在一般的域上,
另外,这里其实隐藏着张量这个数学概念,具体留作后文进一步解读。
2小结
最后,不用矩阵再总结一下西尔维斯特惯性定律(Sylvester's law of inertia)。在实数域中,一个形如
的二次型通过变元代换可以化简成唯一的规范型,
上式由系数矩阵的秩
注意,虽然矩阵合同的概念是后来提出来的,但是上面这些工作是在 1852 年前提出的。
两个实对称矩阵合同,当且仅当它们是在各自基底下表示同一个二次型/双线性形式。