
四足机器人学会“双腿站立下楼梯”!效率比腿式系统高83%

大数据文摘授权转载自机器人大讲堂
还记得那个和特斯拉飙车的机器人吗?

这是瑞士苏黎世联邦理工学院衍生公司研发的与公司同名的四足轮腿式机器人——Swiss-Mile,前身是ANYmal四足机器人。

距离它和特斯拉飙车还不到半年的时间,它又实现了重大升级。

这次升级改进了机器人的算法,运动能力直接UP UP UP !
可以双腿站立下楼梯:

(小编内心OS:如果是我穿轮滑鞋下楼梯可能会摔个狗吃屎)
楼梯爬累了,坐个电梯吧,用前脚按开电梯门:
面对障碍物应对自如:

它还能知道什么时候该站起来,什么时候该“趴下”,双腿直立与四足运动之间的切换更丝滑:

AMP 算法首次应用在真实机器人上
Swiss-Mile之前使用过模型预测控制(MPC)与强化学习(RL)方法,然而这需要进行繁琐的调整才能获得理想的运动方式。

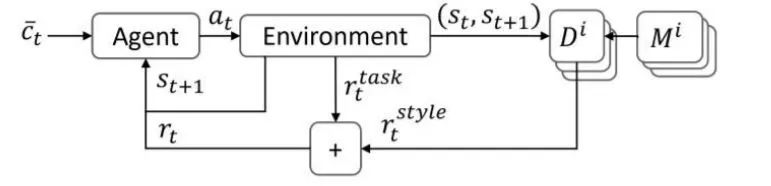
这次的算法升级,研究人员采用了Multi-AMP(Adversarial Motion Priors对抗性运动先验)算法增强了传统的强化学习框架,可以在没有启发式的情况下自动执行多个运动先验的模仿⽬标和运动选择过程。
AMP究竟是什么呢?
这是一种基于物理角色动画的对抗学习系统,由加州⼤学伯克利分校和上海交通大学的研究者提出,并且Swiss-Mile首次将该方法应用于真正的机器人身上!
对于一般的模仿学习,通常需要手动提取大量需要模仿的运动片段作为跟踪目标,而使用AMP能够自动选合适的动作片段来实现目标任务,它将误差度量、相位和运动剪辑选择外包给鉴别器,鉴别器学习区分策略和运动数据的状态转换。
模拟和部署训练
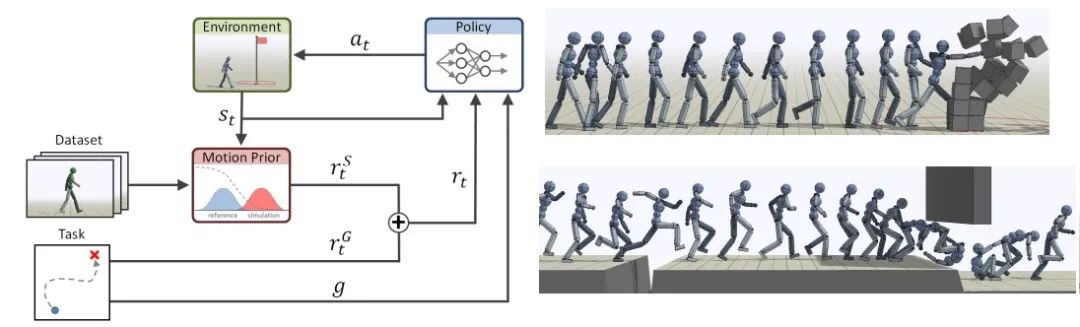
研究人员将Multi-AMP 框架部署在具有 16个自由度的Swiss-Mile上,使⽤ Isaac Gym 模拟器实现,超过 4000个机器人可以同时在 42 分钟内训练技能。
训练环境由三个任务组成:
第⼀个任务是四足运动,运动数据由RL 策略记录的运动组成。

第二个任务是躲避技能,让机器⼈躲到桌⼦下⾯。该技能的运动数据由轨迹优化管道⽣成,由 MPC 控制器部署和跟踪。

最后⼀项任务是“站立”到“四足”之间的运动转换,机器人运用数据解耦技能可以用后腿站起来,⽤两条腿滑行,最后使用与站起来时的相同的动作再次坐下。

最后,将Swiss-Mile部署到真实环境中,研究人员使用腿部关节的执行器模型来弥合模拟到真实的差距,并利用崎岖地形训练、随机干扰等提高稳健性;如果某个关节速度超过了执行器的限制,则通过终⽌轨迹,让机器人学会保持该限制的安全容差。
四足or人形机器人?效率比腿式系统高83%!
Swiss-Mile不仅是四足机器人,也是个人形机器人。
轮式与腿式相比具有许多显着优势,在进行了算法改良后,机器人可以直接以“人形机器人”的状态站立起来,执行滑行、爬楼梯、下坡等高难度动作,能够更快、更有效地移动,比四足行走要快的多,效率比腿式系统高 83%!
未来,该公司希望将轮腿机器人商业化,以完成各种任务,包括地图、检查、救灾和城市环境中的物流等。
也许有一天,你会看到机器人将抬起来的“前腿”作为手臂,抓取快递包裹,然后将它们放在背上的货舱中,再回到四肢着地,以最快的速度送货上门。
