
论文简述| 利用IMU和特征测量在矩阵李群上进行同时定位与建图的非线性滤波器
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
转自| 当SLAM遇见小王同学
摘要
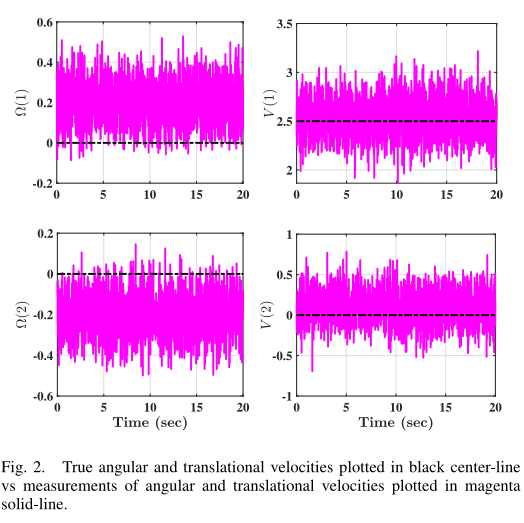
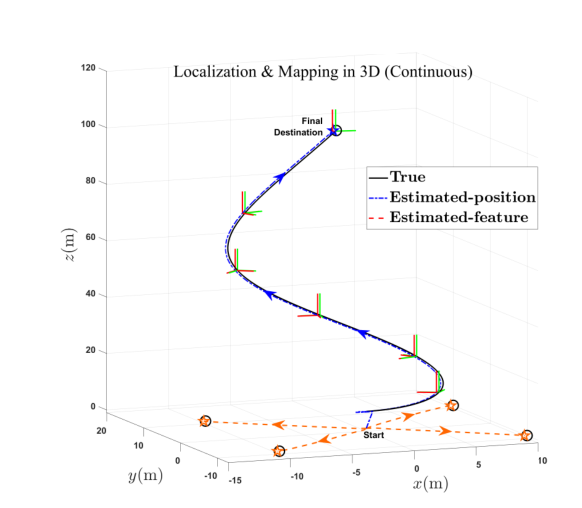
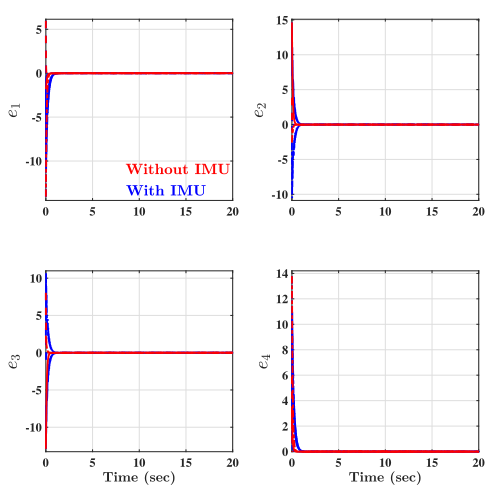
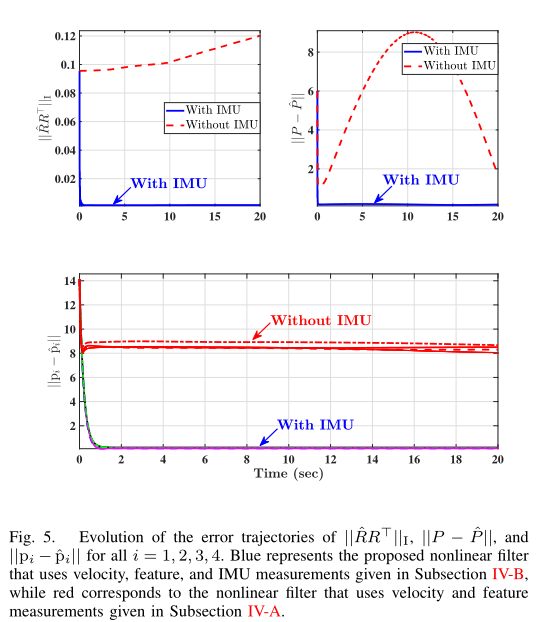
SLAM是同时估计车辆相对于参考系的姿态和特征位置的过程。提出了一种计算量小的几何非线性SLAM滤波算法,该算法被构造成模拟SLAM(3)的矩阵李群上的真实SLAM问题的非线性运动动力学。流形上的非线性滤波器是以连续形式提出的,它利用从群速度矢量获得的可用测量值、特征测量值和惯性测量单元。所提出的估计器成功地处理了速度测量中的未知偏差。仿真结果表明了所提出的滤波器在离散形式下的鲁棒性,证明了其在六自由度姿态估计和三维空间特征估计中的实用性。此外,给出了非线性滤波器的四元数表示。
介绍
这项工作的贡献如下:
本文提出了一种计算量小的几何非线性确定性滤波器 非线性滤波器有效地处理了附加在群速度矢量上的未知偏差。 所提出的滤波器允许姿态和特征的创新之间的交叉耦合。 所提出的滤波器提供了候选李雅普诺夫函数中误差分量的渐近收敛性。 与姿态相关的误差函数几乎在任何初始条件下都是渐近稳定的。 给出了与以前提出的SLAM滤波器在李群上的比较。
结果

结论
在本文中,SLAM问题已经在李群上得到解决,所提出的非线性滤波器直接利用SLAM的李群、平移和角速度的测量,以及特征和惯性测量单元的测量。提出的方法能够解释速度测量中不可避免地存在的未知偏差。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论