
独家|OpenCV 1.2 如何用OpenCV扫描图像、查找表和测量时间(附链接)

翻译:陈之炎 校对:张一然、林夕
本文约4400字,建议阅读10分钟
本文为大家系统地介绍了OpenCV官方教程。
目标
如何遍历图像的各个像素?
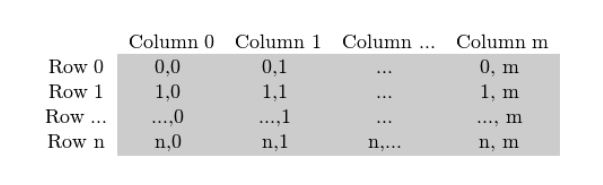
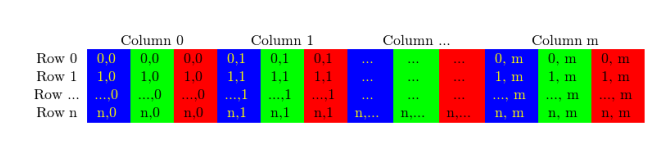
OpenCV的矩阵值是如何存储的?
如何衡量算法的性能?
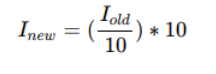
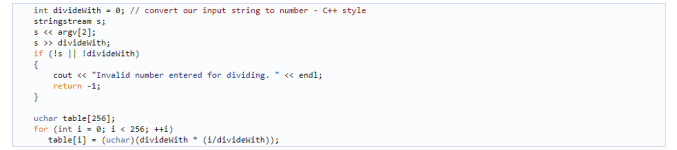
什么是查找表,为什么要使用查找表?
测试案例

https://docs.opencv.org/4.5.2/db/de0/group__core__utils.html

如何在内存中存储图像矩阵?
https://docs.opencv.org/4.5.2/d3/d63/classcv_1_1Mat.html
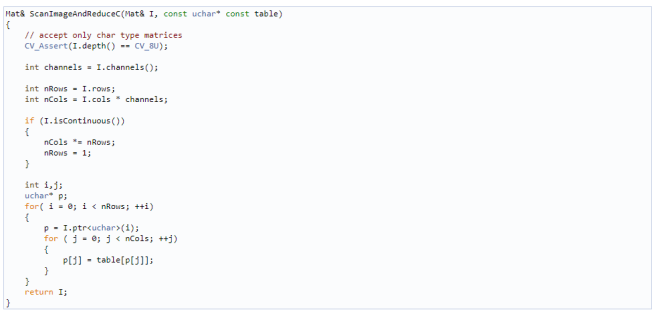
最为有效的方法

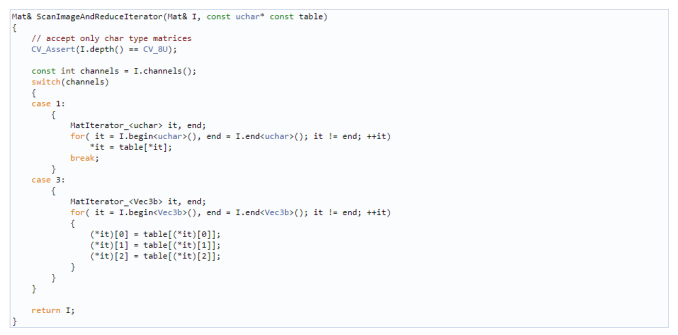
迭代器(安全的)方法
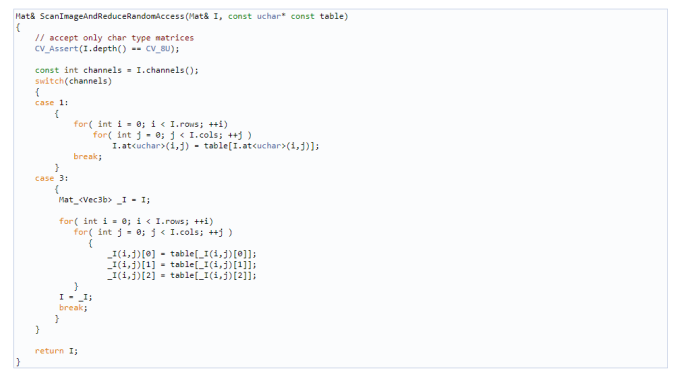
利用引用返回值计算即时地址
cv::Mat_
https://docs.opencv.org/4.5.2/df/dfc/classcv_1_1Mat__.html
cv::Mat::at
https://docs.opencv.org/4.5.2/d3/d63/classcv_1_1Mat.html
核心功能
cv::LUT()
https://docs.opencv.org/4.5.2/d2/de8/group__core__array.html


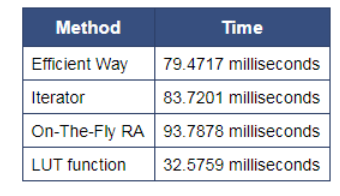
性能差异对比
https://www.youtube.com/watch?v=fB3AN5fjgwc
译者简介

陈之炎,北京交通大学通信与控制工程专业毕业,获得工学硕士学位,历任长城计算机软件与系统公司工程师,大唐微电子公司工程师,现任北京吾译超群科技有限公司技术支持。目前从事智能化翻译教学系统的运营和维护,在人工智能深度学习和自然语言处理(NLP)方面积累有一定的经验。业余时间喜爱翻译创作,翻译作品主要有:IEC-ISO 7816、伊拉克石油工程项目、新财税主义宣言等等,其中中译英作品“新财税主义宣言”在GLOBAL TIMES正式发表。能够利用业余时间加入到THU 数据派平台的翻译志愿者小组,希望能和大家一起交流分享,共同进步
翻译组招募信息
工作内容:需要一颗细致的心,将选取好的外文文章翻译成流畅的中文。如果你是数据科学/统计学/计算机类的留学生,或在海外从事相关工作,或对自己外语水平有信心的朋友欢迎加入翻译小组。
你能得到:定期的翻译培训提高志愿者的翻译水平,提高对于数据科学前沿的认知,海外的朋友可以和国内技术应用发展保持联系,THU数据派产学研的背景为志愿者带来好的发展机遇。
其他福利:来自于名企的数据科学工作者,北大清华以及海外等名校学生他们都将成为你在翻译小组的伙伴。
点击文末“阅读原文”加入数据派团队~
转载须知
如需转载,请在开篇显著位置注明作者和出处(转自:数据派ID:DatapiTHU),并在文章结尾放置数据派醒目二维码。有原创标识文章,请发送【文章名称-待授权公众号名称及ID】至联系邮箱,申请白名单授权并按要求编辑。
发布后请将链接反馈至联系邮箱(见下方)。未经许可的转载以及改编者,我们将依法追究其法律责任。
点击“阅读原文”拥抱组织