
神经网络训练trick总结
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达


很直观,因为神经网络可以随意设计,先验假设较少,参数多,超参数更多,那模型的自由度就非常高了,精心设计对于新手就变得较难了。这里讲一些最简单的trick,肯定不全面,欢迎大家留言补充。因为我也是新手!
下面介绍一些值得注意的部分,有些简单解释原理,具体细节不能面面俱到,请参考专业文章。
那我们直接从拿到一个问题决定用神经网络说起。一般而言,
首先选定你要采用的结构,如一对一,固定窗口,数据维度粒度,MLP,RNN或者CNN等
非线性选择,sigmoid,tanh,ReLU,或者一些变体,一般tanh比sigmoid效果好一点(简单说明下,两者很类似,tanh是rescaled的sigmoid,sigmoid输出都为正数,根据BP规则,某层的神经元的权重的梯度的符号和后层误差的一样,也就是说,如果后一层的误差为正,则这一层的权重全部都要降低,如果为负,则这一层梯度全部为负,权重全部增加,权重要么都增加,要么都减少,这明显是有问题的;tanh是以0为对称中心的,这会消除在权重更新时的系统偏差导致的偏向性。当然这是启发式的,并不是说tanh一定比sigmoid的好),ReLU也是很好的选择,最大的好处是,当tanh和sigmoid饱和时都会有梯度消失的问题,ReLU就不会有这个问题,而且计算简单,当然它会产生dead neurons,下面会具体说。
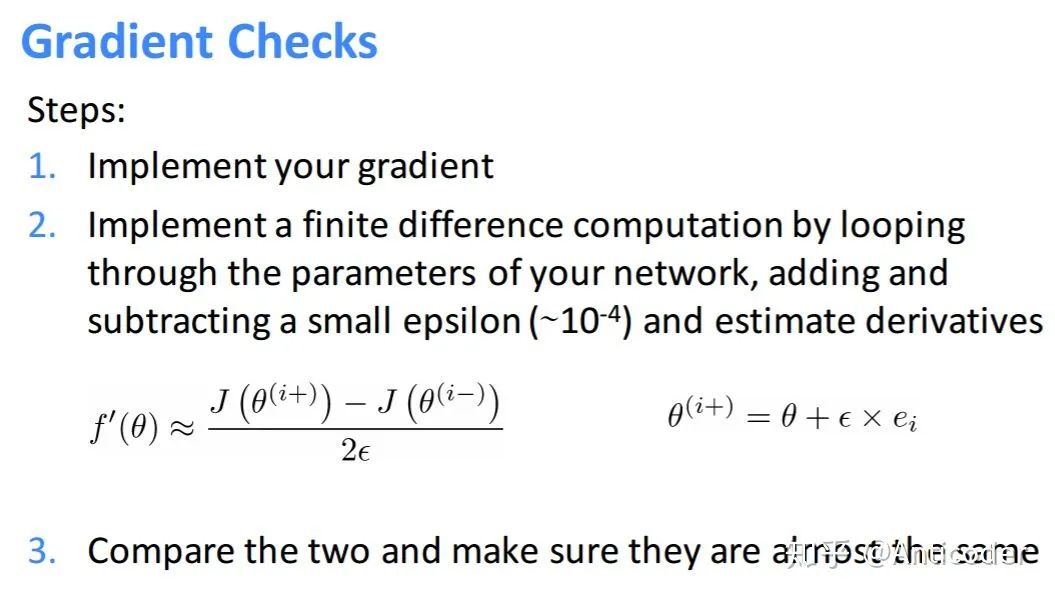
Gradient Check,如果你觉得网络feedforward没什么问题,那么GC可以保证BP的过程没什么bug。值得提的是,如果feedforward有问题,但是得到的误差是差不多的,GC也会感觉是对的。大多情况GC可帮你找到很多问题!步骤如下:
那如果GC失败,可能网络某些部分有问题,也有可能整个网络都有问题了!你也不知道哪出错了,那怎么办呢?构建一个可视化过程监控每一个环节,这可以让你清楚知道你的网络的每一地方是否有问题!!这里还有一个trick,先构建一个简单的任务(比如你做MNIST数字识别,你可以先识别0和1,如果成功可以再加入更多识别数字);然后从简单到复杂逐步来检测你的model,看哪里有问题。举个例子吧,先用固定的data通过单层softmax看feedforward效果,然后BP效果,然后增加单层单个neuron unit看效果;增加一层多个;增加bias。。。。。直到构建出最终的样子,系统化的检测每一步!
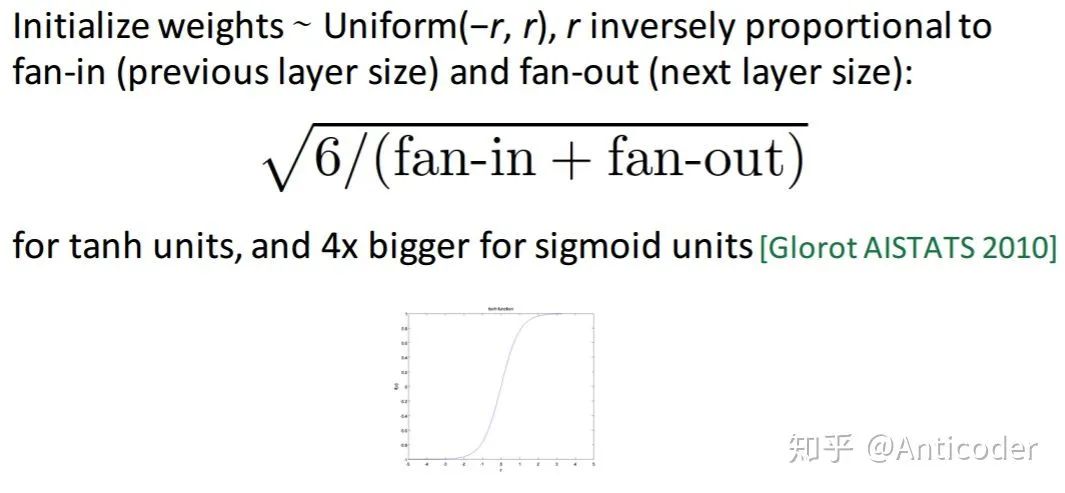
参数初始化也是重要滴!其主要考虑点在于你的激活函数的取值范围和梯度较大的范围!
隐层的bias一般初始化为0就可以;输出层的bias可以考虑用reverse activation of mean targets或者mean targets(很直观对不对) weights初始化一般较小的随机数,比如Uniform,Gaussion
更放心一点,可视化每一层feedforward输出的取值范围,梯度范围,通过修改使其落入激活函数的中间区域范围(梯度类似线性);如果是ReLU则保证不要输出大多为负数就好,可以给bias一点正直的噪声等。当然还有一点就是不能让神经元输出一样,原因很简单
优化算法,一般用mini-batch SGD,绝对不要用full batch gradient(慢)。一般情况下,大数据集用2nd order batch method比如L-BFGS较好,但是会有大量额外计算2nd过程;小数据集,L-BFGS或共轭梯度较好。(Large-batch L-BFGS extends the reach of L-BFGSLe et al. ICML 2001)
学习率,跑过神经网络的都知道这个影响还蛮大。一般就是要么选用固定的lr,要么随着训练让lr逐步变小

看看你的模型有没有能力过拟合!(training error vs. validation error)
最后,可以看到一个网络那么多的超参数,怎么去选这些超参数呢?文章也说了:Random hyperparameter search!
以上提的多是supervised learning,对于unsupervised learning可以做fine tuning
标准化(Normalization)
scale控制特征的重要性:大scale的output特征产生更大的error;大的scale的input的特征可以主导网络对此特征更敏感,产生大的update
一些特征本来取值范围很小需要格外注意,避免产生NaNs
就算没有标准化你的网络可以训练的话,那可能前几层也是做类似的事情,无形增加了网络的复杂程度
通常都是把所有inputs的特征独立地按同样的规则标准化,如果对任务有特殊需求,某些特征可以特别对待
检查结果(Results Check)
需要注意的是,你需要理解你设定的error的意义,就算训练过程error在不断减少,也需要来和真实的error比较,虽然training error减少了,但是可能还不够,真实世界中需要更小的error,说明模型学习的还不够
当在training过程中work后,再去看在validation集上的效果
再更新网络结构前,最好确保每一个环节都有“监控”,不要盲目做无用功
预处理(Pre-Processing Data)
神经网络假设数据的分布空间是连续的
减少数据表示多样性带来的误差;间接减少了网络前几层做没必要的“等同”映射带来的复杂度
正则化(Regularization)
一方面缓解过拟合,另一方面引入的随机性,可以平缓训练过程,加速训练过程,处理outliers
Dropout可以看做ensemble,特征采样,相当于bagging很多子网络;训练过程中动态扩展拥有类似variation的输入数据集。(在单层网络中,类似折中Naiive bayes(所有特征权重独立)和logistic regression(所有特征之间有关系);
一般对于越复杂的大规模网络,Dropout效果越好,是一个强regularizer!
最好的防止over-fitting就是有大量不重复数据
Batch Size太大
如果可以容忍训练时间过长,最好开始使用尽量小的batch size(16,8,1)
大的batch size需要更多的epoch来达到较好的水平
原因1:帮助训练过程中跳出local minima
原因2:使训练进入较为平缓的local minima,提高泛化性
一般数据中的outliers会产生大的error,进而大的gradient,得到大的weight update,会使最优的lr比较难找
预处理好数据(去除outliers),lr设定好一般无需clipping
如果error explode,那么加gradient clipping只是暂时缓解,原因还是数据有问题
需要仔细考虑输入是什么,标准化之后的输出的取值范围,如果输出有正有负,你用ReLU,sigmoid明显不行;多分类任务一般用softmax(相当于对输出归一化为概率分布)
激活只是一个映射,理论上都可以
如果输出没有error明显也不行,那就没有gradient,模型也学不到什么
一般用tanh,产生一个问题就是梯度在-1或1附近非常小,神经元饱和学习很慢,容易产生梯度消息,模型产生更多接近-1或1的值
Bad Gradient(Dead Neurons)
当发现模型随着epoch进行,训练error不变化,可能所以神经元都“死”了。这时尝试更换激活函数如leaky ReLU,ELU,再看训练error变化
使用ReLU时需要给参数加一点噪声,打破完全对称避免0梯度,甚至给biases加噪声
相对而言对于sigmoid,因为其在0值附近最敏感,梯度最大,初始化全为0就可以啦
任何关于梯度的操作,比如clipping, rounding, max/min都可能产生类似的问题
ReLU相对Sigmoid优点:单侧抑制;宽阔的兴奋边界;稀疏激活性;解决梯度消失
太小:信号传递逐渐缩小难以产生作用
太大:信号传递逐渐放大导致发散和失效
比较流行的有 'he', 'lecun', 'Xavier'(让权重满足0均值,2/(输入节点数+输出节点数))
biases一般初始化为0就可以
每一层初始化都很重要
开始一般用3-8层,当效果不错时,为了得到更高的准确率,再尝试加深网络
所以的优化方法在浅层也有用,如果效果不好,绝对不是深度不够
训练和预测过程随着网络加深变慢
Hidden neurons的数量
太多:训练慢,难去除噪声(over-fitting)
考虑真实变量有多少信息量需要传递,然后再稍微增加一点(考虑dropout;冗余表达;估计的余地)
分类任务:初始尝试5-10倍类别个数
回归任务:初始尝试2-3倍输入/输出特征数
这里直觉很重要
最终影响其实不大,只是训练过程比较慢,多尝试
loss function
多分类一般用softmax,在小于0范围内梯度很小,加一个log可以改善此问题
避免MSE导致的学习速率下降,学习速率受输出误差控制(自己推一下就知道了)
AE降维
SGD
也可采用自适应的算法,Adam,Adagrad,Adadelta等减轻调参负担(一般使用默认值就可以)
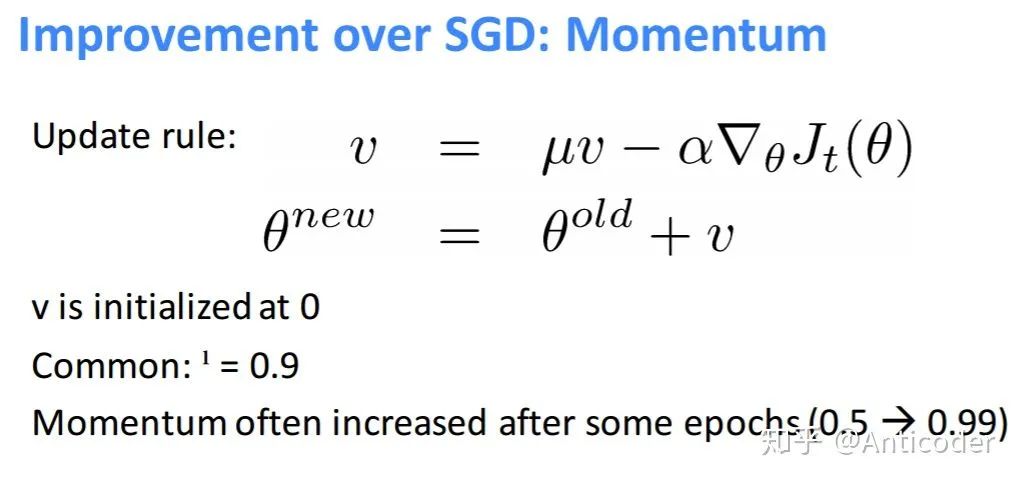
对于SGD需要对学习率,Momentum,Nesterov等进行复杂调参
值得一提是神经网络很多局部最优解都可能达到较好的效果,而全局最优解反而是容易过拟合的解
CNN其优越的性能十分值得使用,参数数量只和卷积核大小,数量有关,保证隐含节点数量(与卷积步长相关)的同时,大量降低了参数的数量!当然CNN更多用于图像,其他任务靠你自己抽象啦,多多尝试!
这里简单介绍一些CNN的trick
pooling或卷积尺寸和步长不一样,增加数据多样性
data augumentation,避免过拟合,提高泛化,加噪声扰动
weight regularization
SGD使用decay的训练方法
最后使用pooling(avgpooling)代替全连接,减少参数量
maxpooling代替avgpooling,避免avgpooling带来的模糊化效果
2个3x3代替一个5x5等,减少参数,增加非线性映射,使CNN对特征学习能力强
3x3,2x2窗口
预训练方法等
数据预处理后(PCA,ZCA)喂给模型
输出结果窗口ensemble
中间节点作为辅助输出节点,相当于模型融合,同时增加反向传播的梯度信号,提供了额外的正则化
1x1卷积,夸通道组织信息,提高网络表达,可对输出降维,低成本,性价比高,增加非线性映射,符合Hebbian原理
NIN增加网络对不同尺度的适应性,类似Multi-Scale思想
Factorization into small convolution,7x7用1x7和7x1代替,节约参数,增加非线性映射
BN减少Internal Covariance Shift问题,提高学习速度,减少过拟合,可以取消dropout,增大学习率,减轻正则,减少光学畸变的数据增强
模型遇到退化问题考虑shortcut结构,增加深度
等等
RNN使用
小的细节和其他很像,简单说两句个人感觉的其他方面吧,其实RNN也是shortcut结构
一般用LSTM结构防止BPTT的梯度消失,GRU拥有更少的参数,可以优先考虑
预处理细节,padding,序列长度设定,罕见词语处理等
一般语言模型的数据量一定要非常大
Gradient Clipping
Seq2Seq结构考虑attention,前提数据量大
序列模型考率性能优良的CNN+gate结构
一般生成模型可以参考GAN,VAE,产生随机变量
RL的框架结合
数据量少考虑简单的MLP
预测采用层级结构降低训练复杂度
设计采样方法,增加模型收敛速度
增加多级shortcut结构
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇
下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~