
李飞飞团队提出零样本泛化的技术,性能超越SOTA!
点击上方“迈微AI研习社”,选择“星标★”公众号
重磅干货,第一时间送达
没错!又是李飞飞! 走在队伍前面的,是来自斯坦福大学的博士,李飞飞的门生! 先来看看李飞飞团队这次在arXiv上发表了的论文题目:
 SECANT:用于视觉策略零样本泛化的自专家克隆 废话少说,给大家介绍一下这篇论文的大致内容。
SECANT:用于视觉策略零样本泛化的自专家克隆 废话少说,给大家介绍一下这篇论文的大致内容。论文介绍
简要介绍 强化学习中的泛化(generalization),是指通过不断跟环境交互,产生出一种网络的记忆性。 这个网络能够根据环境中特定的信号完成相应的动作,经过训练的agent能够记住在什么状态下要做什么,还能通过识别状态的细微差别来采取不同的动作。 再通俗一点,就是在未见过的测试数据上也能够进行预测。 因此,提升模型的泛化是机器学习领域中的一个重要研究。 特别是视觉强化学习方面,泛化很容易被高维观察空间中,一些无关痛痒的因素分散了注意力。
 机器学习中的泛化:欠拟合、拟合、过度拟合 针对这个问题,团队通过鲁棒性策略学习,对具有大分布偏移的未见视觉环境进行零样本泛化。 因此,团队提出「SECANT」模型,一种可以适应新测试环境的自专家克隆方法(Self Expert Cloning for Adaptation to Novel Test-environments)。 这个方法能够在两个阶段利用图像增广,分离鲁棒性表征和策略优化。 首先,专家策略通过弱增广从头开始进行强化学习的训练。 而学生网络就是通过强增广的监督学习来模仿专家策略,其表征与专家策略相比,对视觉变化更具鲁棒性。 实验表明,SECANT在DMControl(Deepmind Control)、自动驾驶、机器人操作和室内物体导航这四个具有挑战性的领域中,在零样本泛化方面超过了之前的SOTA模型,分别实现了26.5%、337.8%、47.7%和15.8%的提升。 主要贡献
机器学习中的泛化:欠拟合、拟合、过度拟合 针对这个问题,团队通过鲁棒性策略学习,对具有大分布偏移的未见视觉环境进行零样本泛化。 因此,团队提出「SECANT」模型,一种可以适应新测试环境的自专家克隆方法(Self Expert Cloning for Adaptation to Novel Test-environments)。 这个方法能够在两个阶段利用图像增广,分离鲁棒性表征和策略优化。 首先,专家策略通过弱增广从头开始进行强化学习的训练。 而学生网络就是通过强增广的监督学习来模仿专家策略,其表征与专家策略相比,对视觉变化更具鲁棒性。 实验表明,SECANT在DMControl(Deepmind Control)、自动驾驶、机器人操作和室内物体导航这四个具有挑战性的领域中,在零样本泛化方面超过了之前的SOTA模型,分别实现了26.5%、337.8%、47.7%和15.8%的提升。 主要贡献 - 提出了SECANT模型,可以依次解决策略学习和鲁棒性表征学习问题,从而实现了对未见过的视觉环境的强大零样本泛化性能。
- 在自动驾驶、机器人操作和室内物体导航四个领域中,设计并制定了一套多样化的基准测试。除了DMControl外,其它3种环境都具有代表实际应用程序的测试时视觉外观漂移。
- 证明了SECANT在以上4个领域中,大多数任务都能达到SOTA。
SECANT框架
SECANT的主要目标是发展自我专家克隆技术,通过这种技术可以实现零样本生成不一样的视觉样本。
作者研究的SECANT训练模型可以分解为两步,代码已公开。
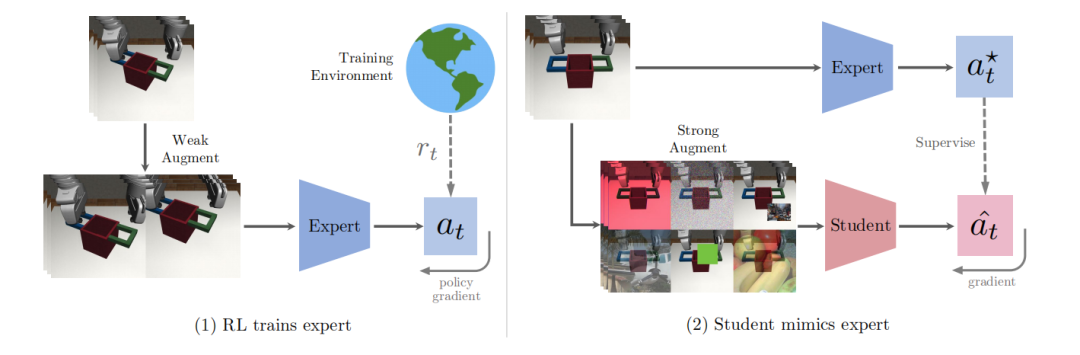 专家策略第一步,作者在原始环境中通过弱增广训练了一套高性能的专家策略。在视觉连续控制任务中,这套策略通过前馈深度卷积网络进行参数化,然后将观察到的图像转化为d维连续动作向量。 在实际应用中,作者采用了帧叠加技术,在时间信息维度上,连接T个连续图像进行观测。然后通过语义保持图像变换来生成数据扩增的算子。采用随机裁剪图像的方法作为默认的弱增广方法来训练专家策略。 这套专家策略可以通过任何标准的RL算法进行优化。作者选择了Soft Actor-Critic (SAC),因为它在连续控制任务中被广泛采用。然后采用梯度下降法对专家参数进行优化,使专家参数最小化。 学生策略在第二阶段,作者训练一个学生网络来预测专家策略采取的最优行动,在同样的观察的条件下,通过剧烈变化的图像来进行测试。在这个阶段不需要进一步接触奖励信号。
专家策略第一步,作者在原始环境中通过弱增广训练了一套高性能的专家策略。在视觉连续控制任务中,这套策略通过前馈深度卷积网络进行参数化,然后将观察到的图像转化为d维连续动作向量。 在实际应用中,作者采用了帧叠加技术,在时间信息维度上,连接T个连续图像进行观测。然后通过语义保持图像变换来生成数据扩增的算子。采用随机裁剪图像的方法作为默认的弱增广方法来训练专家策略。 这套专家策略可以通过任何标准的RL算法进行优化。作者选择了Soft Actor-Critic (SAC),因为它在连续控制任务中被广泛采用。然后采用梯度下降法对专家参数进行优化,使专家参数最小化。 学生策略在第二阶段,作者训练一个学生网络来预测专家策略采取的最优行动,在同样的观察的条件下,通过剧烈变化的图像来进行测试。在这个阶段不需要进一步接触奖励信号。从形式上来看,学生策略也是一个深度卷积神经网络,但与专家策略不同的是它有着不同的架构。本质上来说,学生策略是根据DAgger模仿流程,从专家策略中延伸而来的。 作者使用专家策略来收集轨迹的初始数据集D。接下来,在每一次迭代中,选择一个强扩增算子,并将其应用于采样的一批观测数据。
实验内容
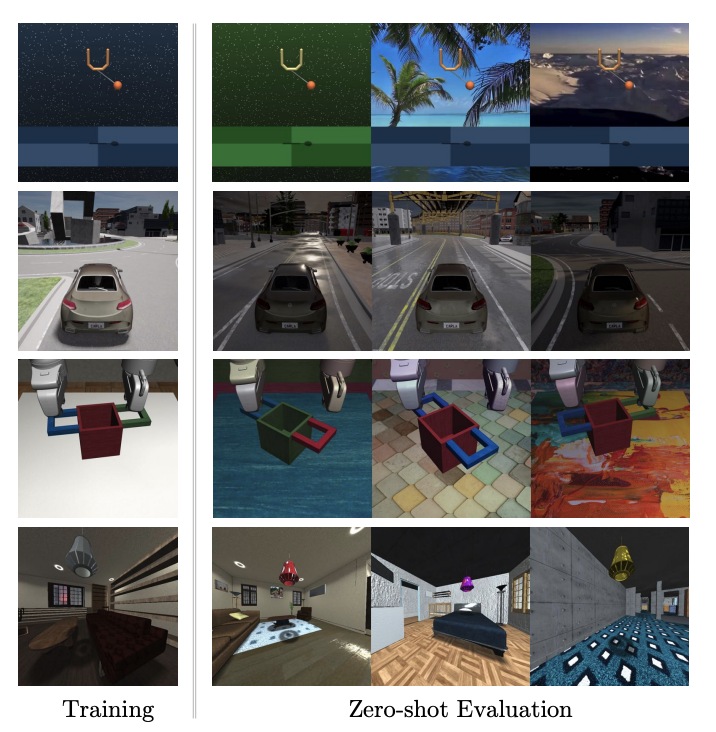 四种不同场景的视觉策略泛化基准测试(从上至下):DMControl Suite、CARLA、Robosuite和iGibson 首先,作者提出了一个适用于四种不同领域的基准测试,系统地评估视觉agent的泛化能力。 在每个领域中,团队研究了在一个环境中训练的算法,在零样本设置中的各种未见环境中的表现如何。此时没有奖励信号和额外的试验。 在每个任务中,SECANT以之前的SOTA算法为基准:SAC、SAC+crop、DR、NetRand、SAC+IDM和PAD。 DMControl
四种不同场景的视觉策略泛化基准测试(从上至下):DMControl Suite、CARLA、Robosuite和iGibson 首先,作者提出了一个适用于四种不同领域的基准测试,系统地评估视觉agent的泛化能力。 在每个领域中,团队研究了在一个环境中训练的算法,在零样本设置中的各种未见环境中的表现如何。此时没有奖励信号和额外的试验。 在每个任务中,SECANT以之前的SOTA算法为基准:SAC、SAC+crop、DR、NetRand、SAC+IDM和PAD。 DMControl  研究团队依照前人的设置,使用来自DMControl的8个任务进行实验。 测量泛化能力,随机生成背景和机器人本身的颜色,将真实的视频作为动态背景。 除了一项任务外,SECANT在所有任务中都显着优于先前的SOTA,通常高出88.3%。
研究团队依照前人的设置,使用来自DMControl的8个任务进行实验。 测量泛化能力,随机生成背景和机器人本身的颜色,将真实的视频作为动态背景。 除了一项任务外,SECANT在所有任务中都显着优于先前的SOTA,通常高出88.3%。 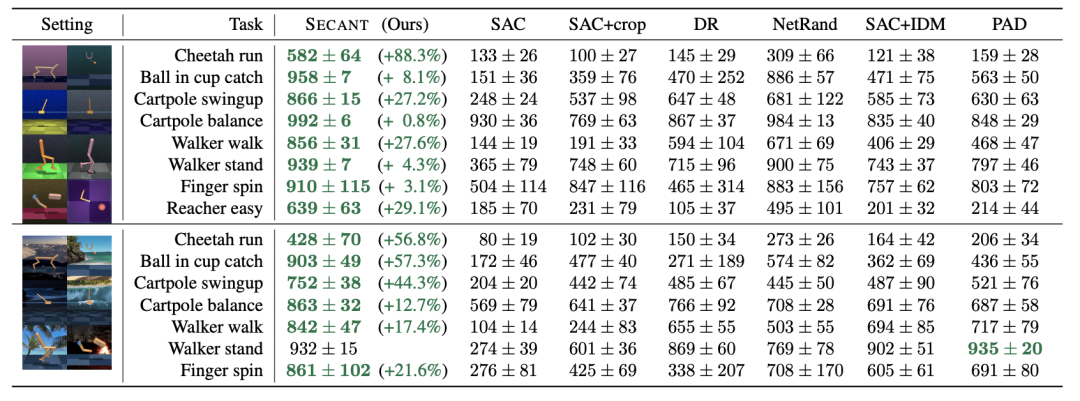 所有方法都经过50万步训练,有密集的任务特定奖励。 Robosuite:机器人操作模拟器 Robosuite是用于机器人研究的模块化模拟器。 作者在4个具有挑战性的单臂和双手操作任务上对SECANT和先前方法进行了基准测试。 使用具有操作空间控制的Franka Panda机器人模型,并使用特定于任务的密集奖励进行训练。 所有agent都接收一个168×168以自我为中心的RGB视图作为输入。
所有方法都经过50万步训练,有密集的任务特定奖励。 Robosuite:机器人操作模拟器 Robosuite是用于机器人研究的模块化模拟器。 作者在4个具有挑战性的单臂和双手操作任务上对SECANT和先前方法进行了基准测试。 使用具有操作空间控制的Franka Panda机器人模型,并使用特定于任务的密集奖励进行训练。 所有agent都接收一个168×168以自我为中心的RGB视图作为输入。 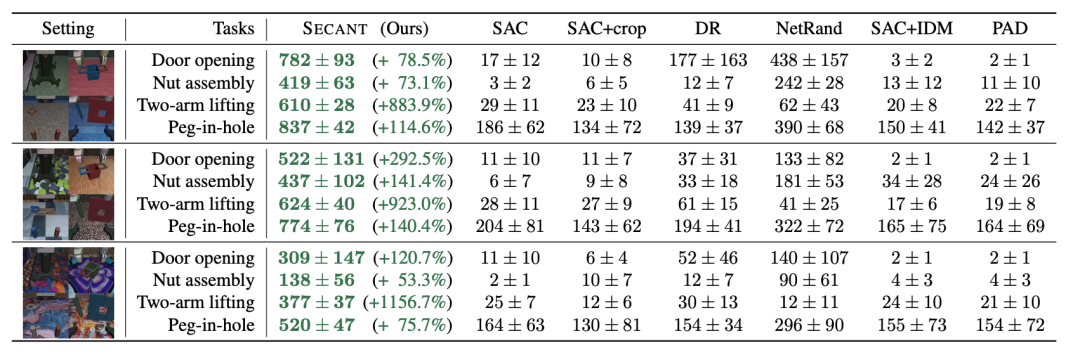 与之前SOTA相比,SECANT有337.8%的提升 实验表明,与之前的最佳方法相比,SECANT在简单设置中获得的奖励平均增加了287.5%,在困难设置中增加了374.3%,在极端设置中增加了351.6%。 CARLA:自动驾驶模拟器 为了进一步验证SECANT对自然变化的泛化能力,作者在CARLA模拟器中构建了一个具有视觉观察的真实驾驶场景。 测试目标是在1000个时间步长内沿着8字形高速公路(CARLA Town 4)行驶尽可能远,不与行人或车辆发生碰撞。 agent在「晴朗的中午」情景接受训练,并在中午和日落时对各种动态天气和光照条件进行评估。
与之前SOTA相比,SECANT有337.8%的提升 实验表明,与之前的最佳方法相比,SECANT在简单设置中获得的奖励平均增加了287.5%,在困难设置中增加了374.3%,在极端设置中增加了351.6%。 CARLA:自动驾驶模拟器 为了进一步验证SECANT对自然变化的泛化能力,作者在CARLA模拟器中构建了一个具有视觉观察的真实驾驶场景。 测试目标是在1000个时间步长内沿着8字形高速公路(CARLA Town 4)行驶尽可能远,不与行人或车辆发生碰撞。 agent在「晴朗的中午」情景接受训练,并在中午和日落时对各种动态天气和光照条件进行评估。 
 例如,潮湿天气的特点是道路具有高反射点。经过平均每个天气超过10集和5次训练运行,SECANT在测试中能够比之前的SOTA行驶的距离增加47.7%。 iGibson:室内物体导航 iGibson是一个交互式模拟器,有高度逼真的3D房间和家具。 在这个模拟器中,实验的目标是尽可能接近一盏灯。 奖励函数激励agent使灯在视野中所占的像素比例最大,当这个比例在连续10个步骤中超过5%时就算成功。
例如,潮湿天气的特点是道路具有高反射点。经过平均每个天气超过10集和5次训练运行,SECANT在测试中能够比之前的SOTA行驶的距离增加47.7%。 iGibson:室内物体导航 iGibson是一个交互式模拟器,有高度逼真的3D房间和家具。 在这个模拟器中,实验的目标是尽可能接近一盏灯。 奖励函数激励agent使灯在视野中所占的像素比例最大,当这个比例在连续10个步骤中超过5%时就算成功。 
在本测试中,在未见过的房间里,SECANT的成功率比之前的方法高出15.8%。
作者简介
 本文一作是李飞飞门下得意弟子Linxi Fan,他毕业于上海实验中学,本科就读于纽约哥伦比亚大学,目前在斯坦福大学攻读博士,主修计算机视觉、强化学习以及机器人技术。在英伟达实习期间完成了本论文。
本文一作是李飞飞门下得意弟子Linxi Fan,他毕业于上海实验中学,本科就读于纽约哥伦比亚大学,目前在斯坦福大学攻读博士,主修计算机视觉、强化学习以及机器人技术。在英伟达实习期间完成了本论文。  本文二作黄德安同样师从李飞飞,本科毕业于国立台湾大学,获得了卡内基梅隆大学硕士学位。目前在斯坦福大学计算机科学专业攻读博士学位,在NVIDIA做泛化学习类研究。
本文二作黄德安同样师从李飞飞,本科毕业于国立台湾大学,获得了卡内基梅隆大学硕士学位。目前在斯坦福大学计算机科学专业攻读博士学位,在NVIDIA做泛化学习类研究。 
三作禹之鼎也是来自NVIDIA的科学家,获得华南理工大学电机工程联合班学士学位、香港科技大学电子工程学士学位,2017年在卡内基梅隆大学获得了ECE博士学位。 2018年加入英伟达,现在是英伟达机器学习研究组的高级研究科学家。
参考资料:
https://arxiv.org/abs/2106.09678
更多细节可参考论文原文,更多精彩内容请关注迈微AI研习社,每天晚上七点不见不散!
© THE END
投稿或寻求报道微信:MaiweiE_com
GitHub中文开源项目《计算机视觉实战演练:算法与应用》,“免费”“全面“”前沿”,以实战为主,编写详细的文档、可在线运行的notebook和源代码。
项目地址 https://github.com/Charmve/computer-vision-in-action
项目主页 https://charmve.github.io/L0CV-web/
推荐阅读
(更多“抠图”最新成果)
微信号: MaiweiE_com
GitHub: @Charmve
CSDN、知乎: @Charmve
投稿: yidazhang1@gmail.com
主页: github.com/Charmve
如果觉得有用,就请点赞、转发吧!
评论