
最完整的摄像头模组设计与制造技术
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
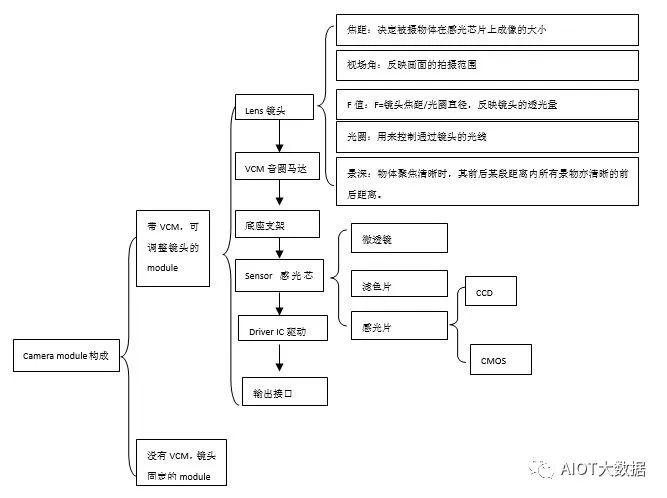
Camera Module 构成
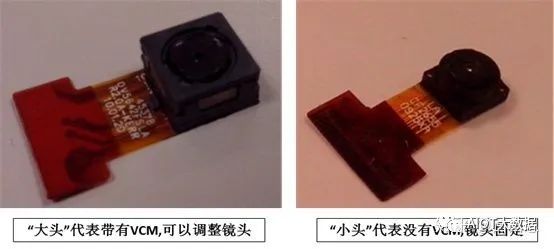
Camera 镜头的长相与区分:
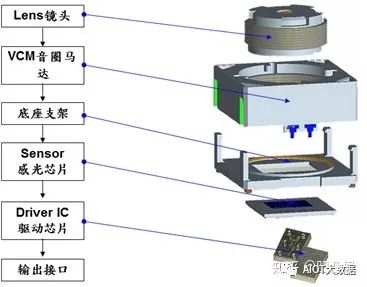
镜头的结构:
“大头”的结构拆分:
各结构说明:
构成部分:
Lens->VCM音圈马达->底座支架->Sensor->Driver IC->output interface
AF模组:
在焦距不变的情况下,通过VCM改变像距,使物体清晰在sensor表面成像。
AF模组通常由镜头,VCM,Sensor,底座,驱动IC以及电源构成。
镜头:由几片透镜组成,通常有玻璃透镜和塑料透镜
VCM:即音圈电机,利用法拉第定律,通过改变马达线圈电流的大小,改变产生的电磁力大小,来控制弹簧片的拉伸位置,从而带动LENSE的运动。
Sensor:一般有CCD和CMOS两种,CMOS和CCD相比在制造工艺,能耗水平和成本方面都有优势,业内使用的比较多,CCD在低ISO时对图像细节的刻画比较好,但只有少数厂家生产使用。
底座:用于固定模组;
驱动芯片:用于控制和通信;
电源:常用的有3.3V和2.5V,在使用AF模组时要注意根据说明提供电源。
镜头主要参数
焦距f。f=wL/W或者f=hl/H。现在通常的有效焦距f=3.5mm或2.5mm
视场角FOV。一般人喜欢大的FOV,但FOV越大,则要求f越小,而且畸变越严重。
F值. Fno.=f/A。f是焦距,A是aperture的直径。F越大,A越小,进光量越小。
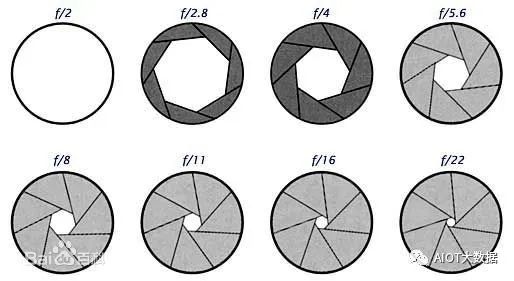
光圈。镜头内部可以用来控制阑孔大小的机械装置。
景深。光圈越大,景深越小。
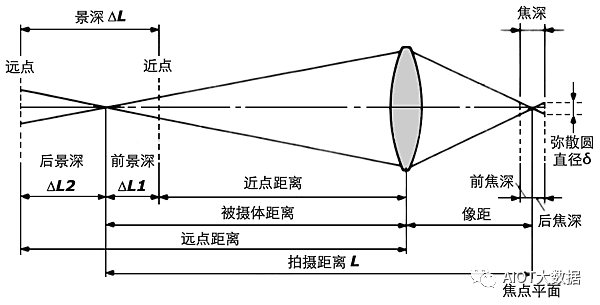
景深=ΔL2+ΔL1,焦深和景深相对应。
而且有1/f=1/L+1/(img_distance)
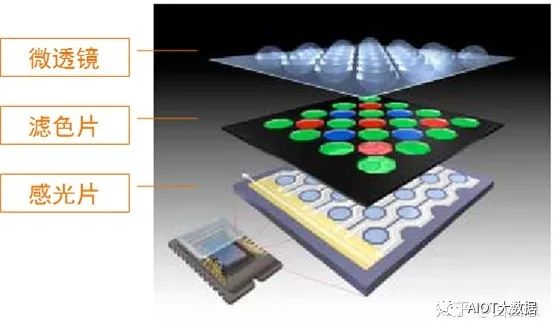
Sensor结构
微透镜:扩大开口率,使感光度大幅提升。
滤色片:帮助感光片具备色彩辨识的能力。感光片本身仅是光与电感应器,透过分色滤片,感光片可以分开感应不同光线的成分,从而在最后影响处理器还原回原始色彩。
感光片:将穿透滤色层的光源转换成电信号,并将信号传送到影像处理芯片,将影像还原。
Camera成像原理:
单反相机 (SLR – Single Lens Reflex) :和双反相机(TLR – Twin Lens Reflex)不同,它只有一个镜头。
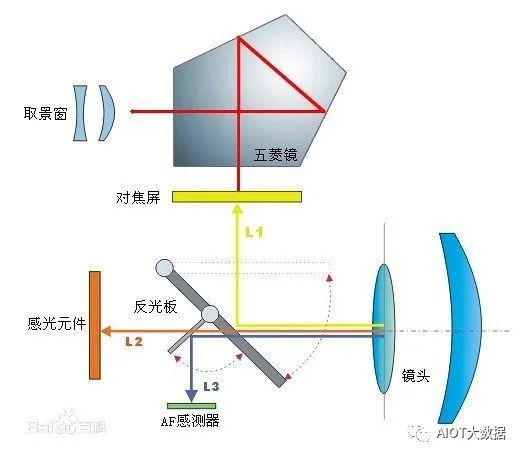
单:所谓“单镜头”是指摄影曝光光路和取景光路共用一个镜头
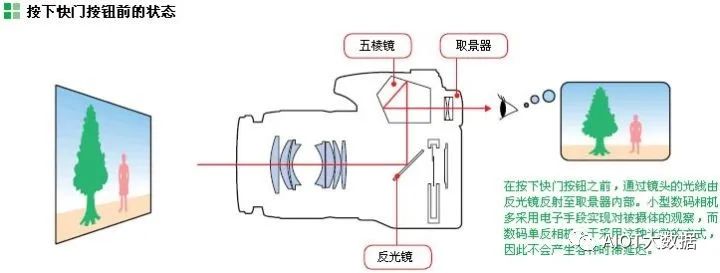
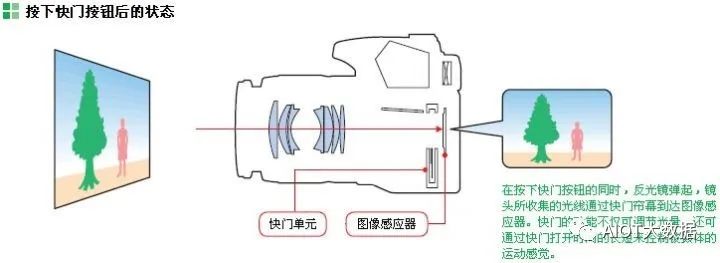
反:“反光”是指相机内一块平面反光镜将两个光路分开:取景时反光镜落下,将镜头的光线反射到五棱镜,再到取景窗;拍摄时反光镜快速抬起,光线可以照射到感光元件CMOS上。
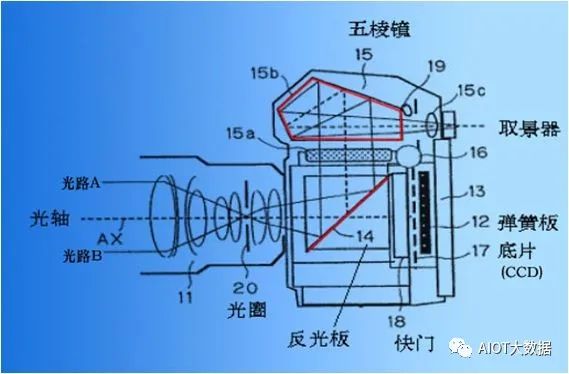
通过反光镜、五棱镜、快门的独到设计,可以在通过快门来控制反光镜和光量进而来控制取景器成像或者相机成像,如下所示:
镜头Lens
lens在相机中的位置、长相、作用:
Lens是一个能够接收光信号并汇聚光信号于感光器件CMOS/CCD的装置。LENS的作用:汇聚光线,在CMOS/CCD上形成景物的图像,为了成像清晰,减少像差,镜头用多片镜片组合,根据需要通过调整LENS获得拍照所需要的焦距。


2.lens的组成和指标:
镜头是由一片或多片弧面(通常为球面)光学玻璃组成的透明光学部件。材料通常为塑胶透镜(plastic)或玻璃透镜(glass)。
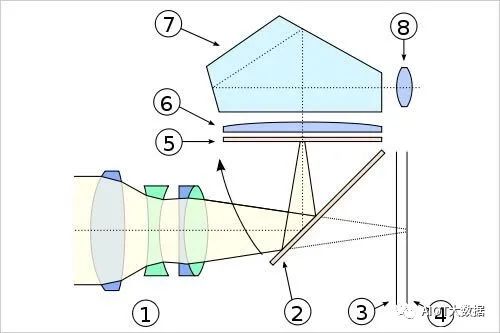
光通过透镜 (1),被反光镜(2)反射到磨砂取景屏(5)中。通过一块凸透镜(6) 并在五棱镜(7)中反射,最终图像出现在取景框(8)中。当按下快门,反光镜沿箭头所示方向移动,反光镜(2) 被拾起,图像被被摄在CCD(4)上,与取景屏上所看到的一致。
Lens 的主要指标:A、消除尽可能多Flare。B、画质清晰度。C、CRA(Chief Ray Angle主光线角度)要match,减少shading。D、光圈尽可能的大。E、Distortion 尽可能的轻微等
CRA: Chief Ray of Angle, Lens cra < Sensor CRA, 相差最好在2度以内,否则容易造成阴影或偏色
3.lens的主要参数:
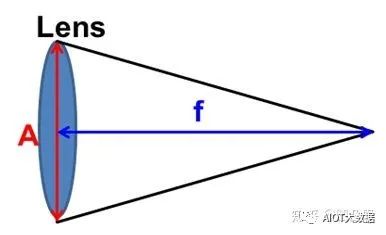
(1).焦距:镜头焦距的长短决定着拍摄的成像大小,视场角大小,景深大小和画面的透视强弱。一般来说对于单片镜头就是镜头中心到焦点的距离,而相机镜头是由多片透镜组合,就要复杂许多。这里焦距就指的是从镜头的中心点到感光元器件(CCD)上所形成的清晰影像之间的距离。
焦距相当于物和像的比例尺,当对同一距离的同一目标拍摄时,镜头的焦距长所成的像大,焦距短所成的像小。
物象的比例:

说明:f :镜头焦距;w:图象的宽度(被摄物体在ccd靶面上成象宽度) ;W:被摄物体宽度;L:被摄物体至镜头的距离;h:图象高度(被摄物体在ccd靶面上成像高度)视场(摄取场景)高度;H:被摄物体的高度 。
(2).视场角:我们常用水平视场角来反映画面的拍摄范围。焦距f越大,视场角越小,在感光元件上形成的画面范围越小;反之,焦距f越小,视场角越大,在感光元件上形成的画面范围越大。
(3).F值(口径比):F 值即指镜头之明亮度(即镜头的透光量)。F=镜头焦距/光圈直径。F值相同,长焦距镜头的口径要比短焦距镜头口径大。
(4).光圈:光圈是位于镜头内部的、可以调节的光学机械性阑孔,可用来控制通过镜头的光线的多少。可变光圈(Iris diaphragm)。镜头内部用来控制阑孔大小的机械装置。或指用来打开或关闭镜头阑孔,从而调节镜头的f-stop的 装置。
(5).景深:当某一物体聚焦清晰时,从该物体前面的某一段距离到其后面的某一段距离内的所有景物也都相当于是清晰的。焦点相当清晰的这段从前到后的距离就叫做景深。
4、lens的光学原理:
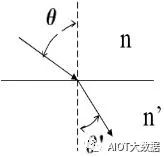
(1)光的反射和折射。光线从介质1(空气)斜射入其它介质时,除过一部分光线被反射外,还有一部分光线进入 介质 2 ,发生折射现象。对于镜头而言 是需要尽可能多的增加折射光,减少反射光。
Snell’s law(折射定律):n sin = n’ sin
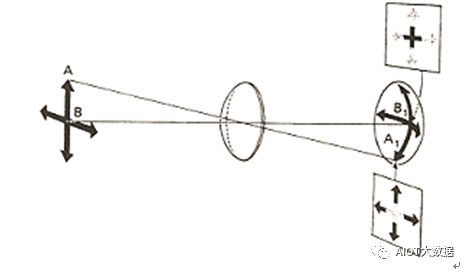
光学系统
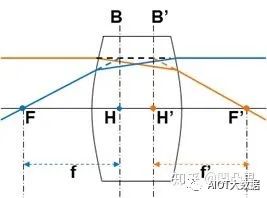
主平面:成像放大率等于1的一对共轭面,如图中B,B’
主点:主平面与光轴的交点,如图中H,H’
焦点:平行光轴入射光线与光轴的交点, 如图中F,F’
焦平面:焦点所在的垂直于光轴的平面
焦距:焦点与主点的距离, 如图中f,f’
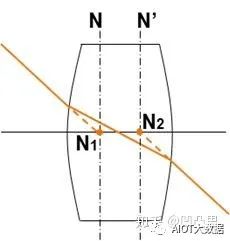
节点:入射光线与出射光线平行时,两光线延长线与光轴的交点。N1和N2分别为物方与像方节点。物空间介质与像空间介质相同时,节点与主点重合。
理想光学系统特性:
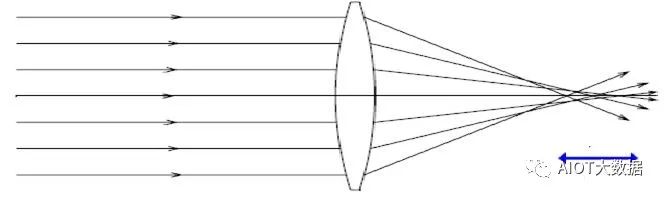
平行于光轴的光线经理想光学系统后必通过像方焦点;
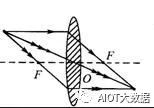
过物方焦点的光线经理想光学系统后必为平行于光轴的光线;
过节点的光线方向不变;
任意方向的一束平行光经理想光学系统后必交于像方焦平面上一点;
过物方焦平面上一点的光线经理想光学系统后必为一束平行光。
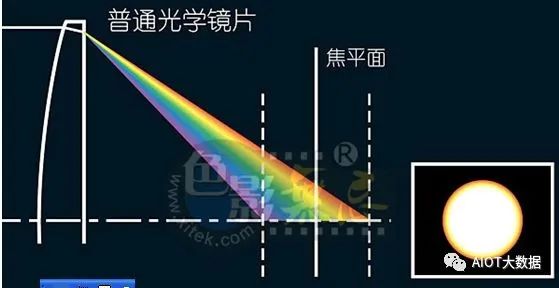
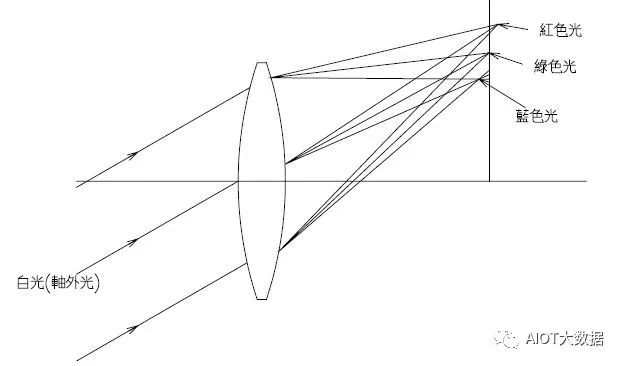
(2)光的色散:白光穿过三棱镜后发生色散,从上往下依次产生红橙黄绿蓝靛紫的光束。是因为在相同介质中,上述光线的折射率依次增大,偏折程度依次增大。就将复色光中不同频率的光分开了。
(3)小孔成像:非透明的板中间留有小孔,物体通过小孔会在像面上成反转倒立真实的像,像的清晰度受小孔的大小影响,孔小不能感应化学物质,孔大模糊。
(4)透镜成像:利用不同类型的玻璃所产生的特定的折射率和色散,让光线偏向并集中强度和大小,是镜头设计的最基本理论。
(5)像差:是光学中,实际像与根据单透镜理论确定的理想像的偏离。这些偏离值是折射作用造成。可通过透镜的组合减小到最低程度。
分为两大类:
A、单色像差是指即使在高度单色光时也会产生的像差,按产生的效果,又分成使像模糊和使像变形两类。前一类有球面像差、彗形像差和像散。后一类有像场弯曲和畸变。
B、色像差简称色差:由于透镜材料的折射率是波长的函数,由此而产生的像差。它可分为位置色差和放大率色差两种。
①单色像差有著名的赛德尔五像差:
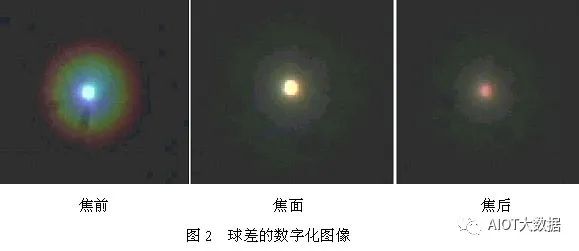
a.球面像差(spherical aberration):一个理想的镜面(顶端),能经所有入射的光线汇聚在光轴上的一个点,但一个真实的镜面(底端)会有球面像差:靠近光轴的光线会比离光轴较远的光线较为紧密的汇聚在一个点上,因此光线不能汇聚在一个理想的焦点上。(分为负球面像差,正球面像差)。
现象:整个孔径光束的垂轴球差在像面上形成了一个对称于光轴的圆形弥散斑,严重时使轴上点成像变得模糊不清。
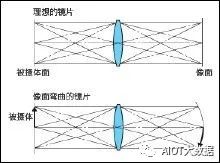
b.佩兹瓦尔像场弯曲(Resolution):像场弯曲是因镜片缺陷,使垂直于主光轴的物平面上发出的光经透镜成像后,清晰的最佳实像面不是平面而是一个曲面的一种像差
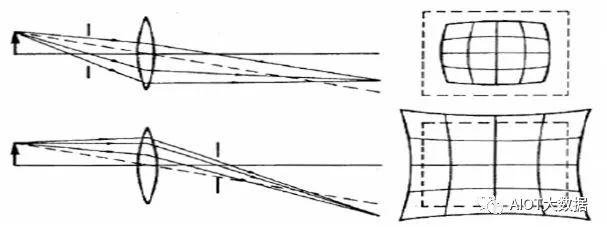
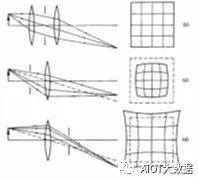
c.畸变(Distortion):像平面上不同位置有不同的放大率. 广角镜头容易产生桶形畸变。长焦镜头容易产生枕形畸变. 畸变与物像点离光轴的垂直高度的立方成正比,因此,物像四角的畸变比物像的四边的畸变程度大.
d.像散(Astigmatism):一束光线可分为水平方向震动和垂直线方向震动两部分。当光线从偏离中轴的斜角度射入,有机会出现水平面光线和垂直面光线聚焦在主轴不同位置的误差。两个焦点之间所产生的影像会变得模糊,边缘像渗开一样。
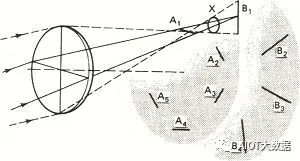
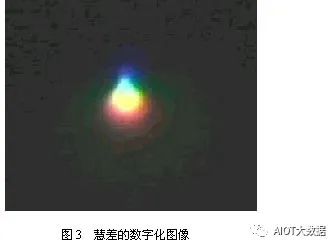
e.彗形象差(coma aberration):光轴外的某一物点向镜头发出一束平行光线,经光学系统后,在象平面上会形成不对称的弥散光斑,这种弥散光斑的形状呈彗星形,即由中心到边缘拖着一个由粗到细的尾巴,其首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的像差称为彗差。
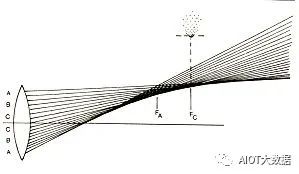
现象:入射光束对于主光线是对称的,系统存在慧差,出射光线也不对称,造成像不是一个点而是一个彗星状的弥散斑
②色像差分为两类:
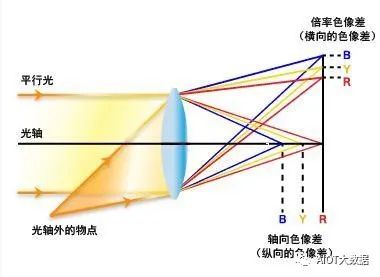
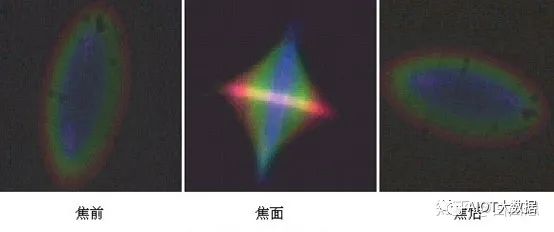
a.轴向色差(Axial chromatic aberration):指的是光轴上的位置,因波长不同产生不同颜色有不同焦点的现象。如上图,红色光线的焦点比蓝色光线的焦点更远离镜片。与物高无关的像差。轴向色像差涉及到成像的焦点距离,引起色彩产生松散或光斑(flare)。
一般,大口径镜头容易产生这种像差,缩小光圈可以减少轴向色差,使画质改善
b.倍率色差Chromatic difference of magnification):与物高一次方成正比的像差。它使不同波长光线的像高不同,在理想像平面上物点的像成为一条小光谱。指像的周围因光线波长的差异,所引起的映像倍率之改变。倍率色差表现在像的边缘有扩散的彩色条纹,涉及到成像的大小,在画面周围引起色彩错开,形成扩散的彩色条纹,如镶边(fringing)现象。是一种轴外像差,随视场角的增大而增大,但在光轴中心为零。
(6)LensShading:
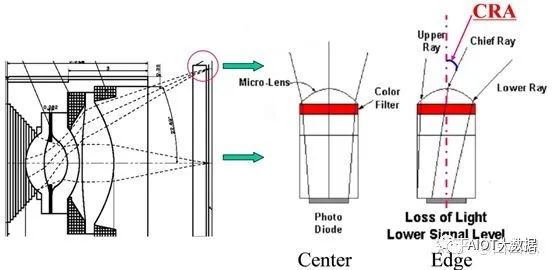
产生的原因:a、入射光线角度的大小。当入射光线的角度较小时,反射的光就少,同时由于lens 表面上有一层镀膜,也会提升镜头的透光性,减弱反射光。这样就使得中心的聚光能力比四周强。中心和四周的亮度差增大。b、主光线进光角度过大,导致光无法有效進入sensor 的micro lens內, 造成lens shading较严重。
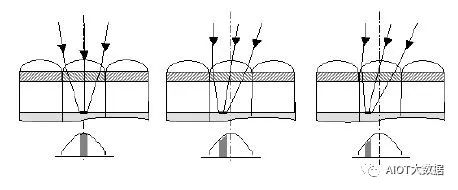
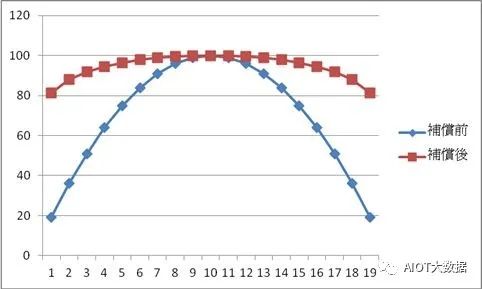
补偿的方法:分别对R、G、B每个通道的光线进行补偿。让RGB channel 都补到相同的curve。
(7)Color Shading:ColorShading是由于前面补偿 LensShading (Y Shading)后,四周颜色和中心颜色不一致的问题。
产生的原因:
A、Lens 与sensor的CRA(Chief Ray Angle主光线角度)不Match。其中Lens CRA:镜心到成像面的角度;Sensor CRA: Micro lens可以接收的角度 。
B、sensor 设计不合理。Sensor本身无法有效吸收进入的光子, 当光子产生绕射现象跑到其他pixel上, 与sensor 设计有关。如本是R piex 应该吸收的光子 被反射到 G Piex 区域。此时会出现色差。
C、由于前面补偿 LensShading (Y Shading)后,四周颜色和中心颜色不一致的问题。(不同色温的RGB channel curve不同)。
(8)LENS好坏判断指标:
A. 镜面反光以及一些特殊场景引起的flare,鬼影,这些现象都是很难消除的,只能通过镜片镀膜或者内面防反射处理,来尽可能减少flare。
B.高像素配合清晰的画质才是好的LENS,单纯的高像素没有多大意义。
C. LENS IMAGE CIRCLE(感光区)要足够大,能够覆盖到sensor的感光区,要避免组装误差导致lens的成像区无法进去感光区中。
D.CRA(Chief Ray Angle主光线角度) 满足的条件,以减小Shading现象。
E. 光圈要尽可能大,镜头的distortion要尽可能小。
Micro Lens 微透镜:
1、sensor中的微透镜:像素的感光区域上方装置微小镜片,故感光面积不再由感光片的开口面积决定,而由微透镜的表面积来决定。这样便在兼顾单一像素大小的同时,在规格上提高了开口率,使感光度大幅提升。
CMOS传感器的结构:1.微透镜 2.色彩滤镜 3.感光片(光电二极管) 4.高速传输电路
2、微透镜的原理和作用:
红框框里面才是每个“像素”真正的大小
图中标明Pixel的红方块是CMOS中真正可以感光的区域,四周的T1、包括VSS,都是辅助用的晶体管或者接口的位置,对比蓝框和红框会发现,一个像素所在的区域中,很大一部分面积无法用来感光,这是巨大的浪费。使用微透镜就可将射到图内红蓝框之间区域的光汇聚到像素这口深井中了。
电子显微镜下CMOS的微透镜
加上透镜后,传感器每个像素的感光范围就增大了,如下:
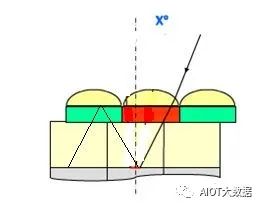
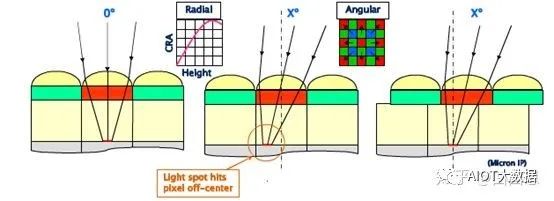
3、微透镜对图像的影响:
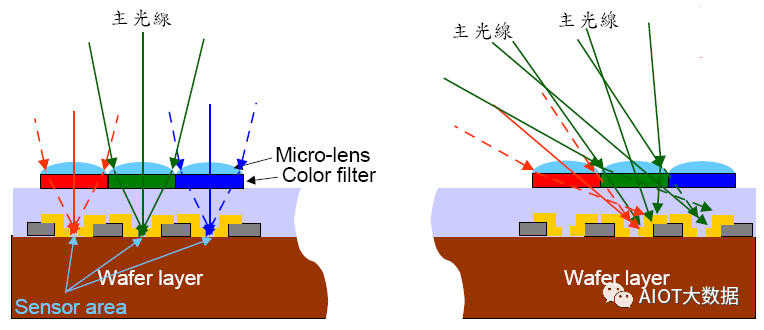
微透镜起到收集光线的作用,而此micro lens在每个视场并不是位于pixel正上方的,如果lens的CRA(chief ray angle)值与sensor的micro lens CRA值不匹配,将会导致shading严重或者成像color shading严重问题。
其中:
Lens CRA:鏡心到成像面的角度
Sensor CRA: micro lens可以接收到的最大光的角度。
lens CRA小于sensor CRA,会出现四周偏暗的情况,此时光线达不到pixel的边缘;
lens CRA大于sensor CRA,光线折射到临近的pixel,导致pixel之间出现串扰,出现图像的偏色,在图像四周变现的更明显,因为CRA从图像中心到四周是呈曲线状上升,逐渐变大的。
4、微透镜的CRA设计建议:
A、Lens CRA < Sensor CRA, 否则光容易被反射掉;
B、CRA 要匹配, Lens與Sensor 的差異在2度以內。
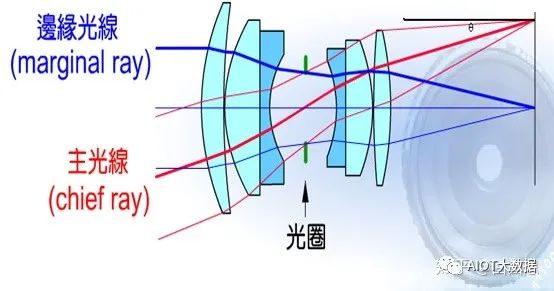
注:CRA(Chief Ray Angle)
主光线就是由物体的边缘发出通过光圈的中心最后到达像的边缘的光线。主光线角度是主光线与平行光线的角度。
1)Lens CRA:鏡心到成像面的角度
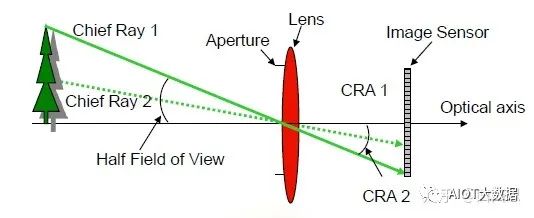
2)sensor CRA,就是Sensor的Micro Lens与光电二极管的位置存在一个水平误差,并不在一条直线上,做成这样有一定的目的,按通常的做法,因为sensor 的Microlens与光电二极管之间存在一定的距离,这样的目的也是为了好搭配lens。
从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为一个参数,称为主光角(CRA)。对于主光角的一般性定义是:此角度处的像素响应降低为零度角像素响应(此时,此像素是垂直于光线的)的80%。
光线进入每个像素的角度将依赖于该像素所处的位置。镜头轴心线附近的光线将以接近零度的角度进入像素中。随着它与轴心线的距离增大,角度也将随之增大。CRA与像素在传感器中的位置是相关的,它们之间的关系与镜头的设计有关。很紧凑的镜头都具有很复杂的CRA模式。如果镜头的CRA与传感器的微镜头设计不匹配,将会出现不理想的透过传感器的光线强度(也就是“阴影”)。通过改变微镜头设计,并对拍摄到的图像进行适当处理,就可以大大降低这种现象。
SENSOR:
图像传感器
Image sensor(图像传感器)是一种半导体芯片,其表面有几十万到几百万个光电二极管,光电二极管受到光照就会产生电荷,将光线转换成电信号。其功能类似于人的眼睛,因此sensor性能的好坏将直接影响到camera的性能:
Sensor的结构:
CCD (Charge Couple Device):电荷耦合器件,矽晶半导体,类似太阳能电池,透过光电效应,转化为存储电荷;
(1)成像单元:
CCD
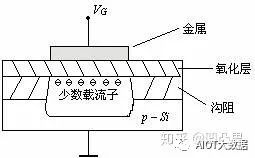
CCD是由许多个光敏像元按一定规律排列组成的,构成CCD的基本单元是MOS(金属-氧化物-半导体)电容器。
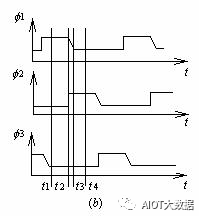
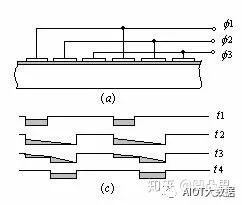
在P型Si衬底表面上用氧化的方法生成一层厚度约为1000A~1500A的SiO2,再在SiO2表面蒸镀一金属层(多晶硅或金属),在衬底和金属电极间加上一个偏置电压,就构成一个MOS电容器。
以P型为例,当电极上加有正偏压(对于N型Si衬底则加负偏压),它形成的电场穿过SiO2薄层排斥P型Si种的多数载流子(空穴),于是在电极下形成一个耗尽层,即得到一个储存少数载流子(电子)的势井。
电荷耦合器件必须工作在瞬态和深度耗尽状态。
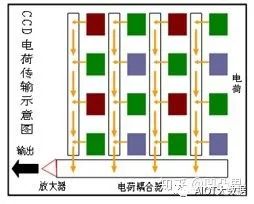
(2)CCD元件电荷转移也就是数据读取的方法:由下图示可以看出,CCD是全部传输出来再统一处理,CCD传感器中每一行中每一个象素的电荷数据都会依次传送到下一个象素中,由最底端部分输出,再经由传感器边缘的放大器进行放大输出。这是由于在构造上,CCD可以充分保证电荷信号在传送时不会失真,每个像素可以集合至单一放大器统一处理。
(3)不同的工艺:传统CCD和改进的super CCD:
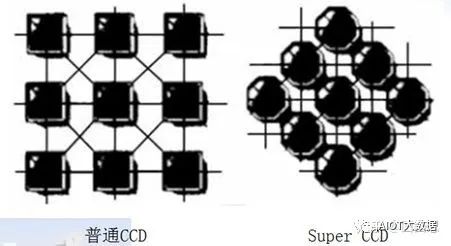
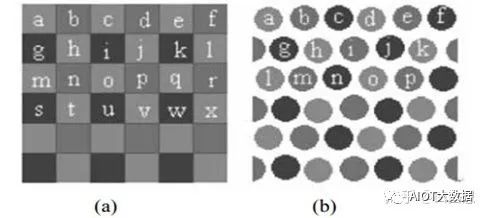
传统的是(a),采用矩形排列,恢复RGB时每个像素复用四次;supper CCD是(b),采用蜂窝状排列,恢复RGB时每个像素复用六次。Supper CCD提高了sensor的最大分辨率。
2、CMOS (Complementary Metal Oxide Semiconductor):互补金属氧化物半导体,由硅和锗这两种元素做成的半导体,使其在CMOS上共存着带N(-)和P(+)级的半导体 。
(1)成像单元:电子转电压及缓冲放大等作用都是在成像单元内完成的。
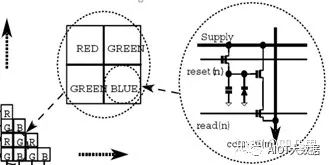
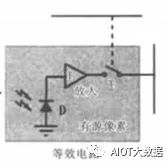
上图CMOS成像单元对应电路
(2)CMOS元件电荷转移也就是数据读取的方法:CMOS是先分别处理再传出来,
CMOS可以分为两种:
CMOS Passive Pixel Sensor无源像素型(PPS)
无源像素单元具有结构简单、像素填充率高及量子效率比较高的优点。但是,由于传输线电容较大,CMOS无源像素传感器的读出噪声较高,而且随着像素数目增加,读出速率加快,读出噪声变得更大。
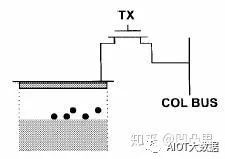
2.CMOS Active Pixel Sensor有源像素型(APS)。即每组像素顶端有一个放大器,每个像素只有一个作为阈值电流值开关的三极管。目前标准的CMOS APS像素由一个光电二极管以及转移门管、复位门管、选通门管和源跟随器读出管等4个晶体管组成,因此被称为4T(4晶体管)单元
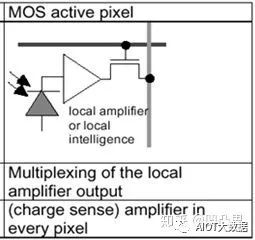
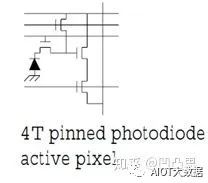
对于第二种每一个像素都会连接一个放大器和ADC电路,用类似闪存的方式将数据读出。这是由于CMOS的工艺相对简单,没有专属通道设计,数据在传送距离较长时会产生噪声,因此必须先放大再整合各个像素的数据。
(3)不同的工艺:
A、前照式FSI(Front Side Illumination)和背照式BSI(Back-side Illumination):
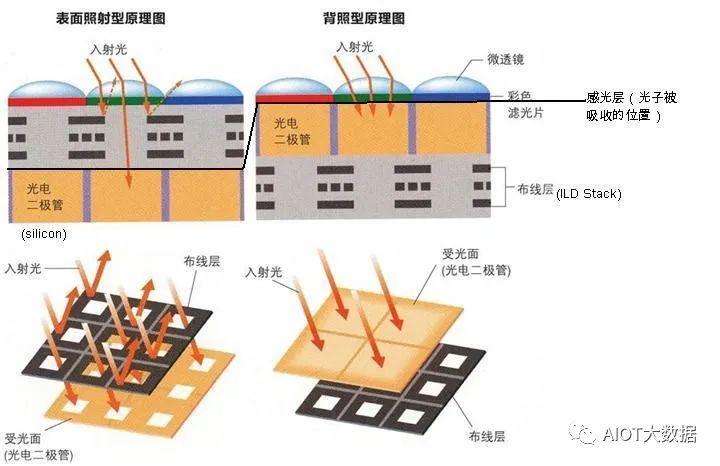
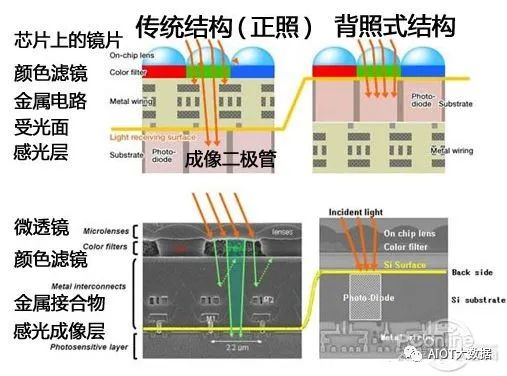

FSI BSI感光成像对比
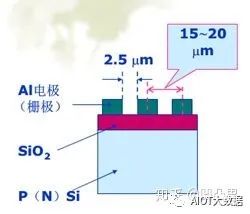
前照式:结构中构成传感器感光区域的金属电极和晶体管被置于基板表面,不仅阻碍了片上透镜的采光进程,而且也成为像素尺寸小型化和扩大光学视角响应方面的一个重要难题。
后照式:传感芯片的结构把感光像素与金属电极晶体管分别置放于片的两面使像素占空比达到了提高了分辨率缩小了核心尺寸加快了响应速度增加了光线采集效率改善了信噪比背照射图像传感器的光谱响应区间可延伸到深紫外频段并能保持高且稳定的灵敏度。
前照式和后照式工艺对比:常规半导体处理器的厚度约为100微米左右,由此也可体会到仅有3-4微米厚度的背照 式CMOS是何其纤薄的,传统表面照射型CMOS只要保证受光面平整即可,对背面的均一性并无特殊要求。而背照式CMOS则必须严格保证正反两面均极其平整。这一点也同样带来了技术上的难度。
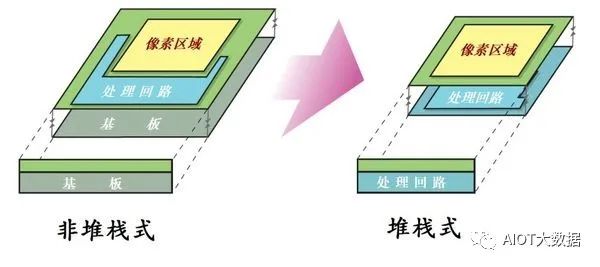
B、后照式和堆栈式(Stacked):是在背照式基础上的改进。堆栈式传感器是将原来普通传感器里的信号处理电路放到了原来的支持基板上,这样就可以把腾出来的空间放置更多的像素,实现在小尺寸传感器上集更多的像素,由于像素部分和电路部分分别独立。因此像素部分可针对高画质优化,电路部分可针对高性能优化。
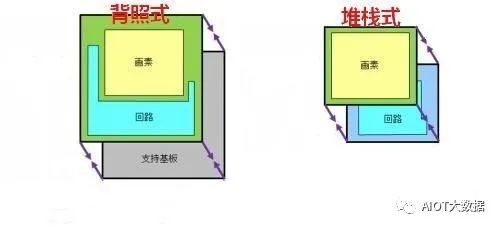
关于FSI ,BSI,和堆栈式最大最基础的差别就在于其结构,
可以简单理解为BSI相对于FSI 就是把感光层从布线层的下面放到了上面
堆栈式相对于BSI就是把信号处理回路放在了基板上,腾出了空间种更多的像素
(4)数据处理Flow:
Input信号放大(gain control)AD转换暗电流校准数字增益(这里开始 Image sensor processor)DSP图片压缩与编码FIFODVP/MIPI TX
Sensor中已经包括多种处理功能:AGC,AEC,AWC,gamma校正,背景补偿,暗电流校正等。
3、CMOS noise:Sensor pattern noises (SPNs),
随机噪声:
暗电流(能极深处的电子因高热激发而产生)散粒噪声;
MOSFET复位噪声(KTC噪声或者电容噪声);
放大器噪声;
光散粒(光的粒子波动性产生的)噪声 。
(2)固定图像噪声(FPN):
用均匀光照条件下单个像素输出的信号变化表示。由于CMOS每个感光二极体旁都搭配一个ADC 放大器,如果以百万像素计,那么就需要百万个以上的ADC放大器。虽然是统一制造下的产品,但是每个像素结构中的光电二极管的尺寸、掺杂浓度、生产过程中的沾污以及MOS场效应管的参数的偏差等都会造成像素输出信号的变化 。
表现形式:转移劣化(低照度黑点和彩色的直线);光电二极管的观光度不均匀(亮白点、亮点、黑点与亮斑纹)。
4、CMOS和CCD比较:
(1)、成像比较:
相同尺寸下CCD的成像往往通透性、灵敏度,分辨率都很好,色彩还原、动态范围大,曝光可以保证基本准确。
CMOS的产品往往通透性一般,对实物的色彩还原能力偏弱,曝光也都不太好。
(2)、功耗比较:
CCD 一般为被动式的图像采集方式,功耗比较高,为使电荷传输顺畅,噪声降低,需要高压差改善传输效果;另外由于CCD 无法ADC和讯号处理,导致需要使用3~4组电源。
CMOS采用主动式的图像采集方式,功耗比较低,不到CCD 的1/3,CMOS影像传感器将每一画素的电荷转换成电压,读取前就将其放大,利用3.3v的电源即可驱动,只需一组电源。
(3)、噪声比较:
CMOS 每一个像素都搭配一个放大器,而发达器是模拟电路,一致性无法保证,会引入noise ,影响图片质量 CCD只有在一个放大器在芯片边缘
(4)、存储的同时性比较
扫描线
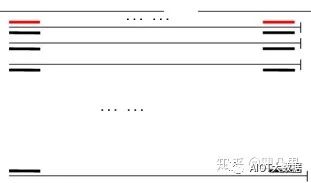
CCD sensor
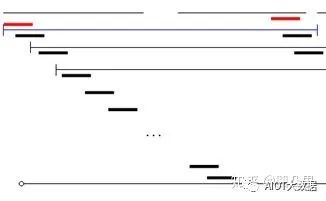
CMOS sensor
CCD图像传感器不管属于哪一条扫描线的像素,储存时间都相同,COMS图像传感器随着摄影面的扫描时序,储存时期发生偏差,前者称为global exposure,后者称为line exposure(快速动作的拍摄图像会拍出扭曲的形状).
(5)、总体比较:
CCD的优点是灵敏度高,噪声小,信噪比大。但是生产工艺复杂、成本高、功耗高,像素提升难度大。
CMOS的优点是集成度高(将ADC与讯号处理器整合,具备了数字化传输接口,不需要进行A/D转换,可以大幅缩小体积)、功耗低、成本低,结构便于进行高速的并行读取。但是噪音比较大、灵敏度较低、对光源要求高。(在采用CMOS为感光元器件的产品中,通过采用影像光源自动增益补强技术、自动亮度、白平衡控制技术,色饱和度、对比度、边缘增强以GAMMA校正等技术进行影像控制技术,完全可以达到与CCD摄像头相媲美的效果。)

IR-CUT双滤镜(Infrared-CUT)
IR-CUT双滤镜概述:
为什么要有IR-CUT?
IR自然界存在着各种波长的光线,人眼识别光线的波长范围在320nm-760nm之间, 超过320nm-760nm的光线人眼就无法见到;而摄像机的成像元器件CCD或CMOS可以看到绝大部分波长的光线。由于各种光线的参与,摄像机所还原出的颜色与肉眼所见在色彩上存在偏差。如绿色植物变得灰白,红色图画变成浅红色,黑色变成紫色等。在夜间由于双峰滤光片的过滤作用,使CCD不能充分利用所有光线,不产生雪花噪点现象及其低照性能难以令人满意。为了解决这个问题,就使用IR-CUT双滤镜。
什么是IR-CUT?
IR-CUT双滤镜是指在摄像头镜头组里内置了一组滤镜,当镜头外的红外感应点侦测到光线的强弱变化后,内置的IR-CUT自动切换滤镜能够根据外部光线的强弱随之自动切换,使图像达到最佳效果。也就是说,在白天或黑夜下,双滤光片能够自动切换滤镜,因此不论是在白天还是黑夜下,都能得到最佳成像效果。
2、IR CUT双滤光片切换器的组成和工作原理:
IR CUT双滤光片切换器由一个红外截止低通滤光片(一片红外截止或吸收滤光片)、一个全光谱光学玻璃(一片全透光谱滤光片)、动力机构(可以是电磁、电机或其他动力源)以及外壳组成,它通过一块电路控制板来进行切换、定位。当白天的光线充分时,电路控制板驱使切换器切换并定位到红外截止滤光片工作,CCD或CMOS还原出真实色彩;当夜间可见光不足时,红外截止滤光片自动移开,全光谱光学玻璃开始工作,这时,它能感应红外灯的红外光,使CCD或CMOS充分利用到所有光线,从而大大提高了红外摄像机的夜视性能,整个画面也就清晰自然了。
3、IR-CUT双滤光片切换器好坏区分 :
a、滤光片的红外线截止程度,透光率,和光整形效果等。
b、动力驱动部分
c、控制电路
4、滤光片:
白天,CCD或CMOS同时感应到可见光和红外光,波长越长,折射率越小;波长越短,折射率越大。因此,当这些光线同时进入摄像机镜头,被镜头透镜折射后,可见光和红外光就会在不同的靶面成象,而可见光的成像为彩色图像、红外光的成像为灰度图像,当我们将可见光所成图像调试好,也就是所谓镜头后焦调整和聚焦,这时红外光就会在这个靶面形成虚像,从而影响图象的颜色和质量。
一般用镀膜(IR Coating)的方法或蓝玻璃来滤除红外光。
IR Coating分真空镀膜和化学镀膜。化学镀膜是将石英片侵入溶剂中加以电镀,成本低但镀膜厚度不均匀且容易脱落,真空镀膜是用真空蒸镀法,镀膜厚度均匀且不容易脱落,但成本较高。由于存在红外半峰带宽的问题,必须针对每一款产品,镀与之相适应、截止不同波长波段的膜。IR Coating镀膜是用“反射”的方式滤掉红外光,而反射光容易造成干扰。
蓝玻璃是用“吸收”的方式过滤红外光,是比较好的选择,但蓝玻璃不能单独长时间保存和使用,因为在切割、打磨抛光加工过程中,蓝玻璃表面物理层被破坏,就会产生析晶(俗称发霉),因此,我们一般常用两片水晶夹一片蓝玻璃。如“三片式”滤光片,其中IR Coating膜或蓝玻璃用来滤除红外光,而水晶用来修整光线解决色漂(伪彩),在水晶片上还需AR Coating镀膜,用来增加透光率。
关于AR Coating:
由于滤光片并不是完全透光的,需要加上所谓的AR Coating的镀膜,目的是增加透光率。并且AR Coating具有抗氧化之功能和有增加保护膜之功能,滤光片有AR Coating的保护也就不容易起雾了。
关于水晶:
CCD 和CMOS两者都是利用矽感光二极管进行光与电转换的图像传感器,由一颗颗的感光体(CELL)构成,它要求光线最好是直射进来,斜射进来的光会干扰到邻近感光体,而产生色漂(伪彩),这就需要对光线加以修整。我们利用水晶的物理偏光特性,把射进来的光线,保留直射部分,反射和折射斜射部分,避免斜射光去影响旁边的感光点。但是,斜射光存在不同的角度,一片水晶只能处理一个方向的斜射光,从理论上来说,不同方向的水晶片叠加的层数越多,解决色漂(伪彩)的效果就越好。
但考虑到实际需求和成本,一般都只用1到3片水晶片来解决水平、垂直和45°角的色漂(伪彩)问题。也就有所谓“两片式”、“三片式”滤光片,其中IR Coating膜或蓝玻璃用来滤除红外光,而水晶用来修整光线,在水晶片上还需AR Coating镀膜,用来增加透光率。
5、动力驱动:
IR CUT双滤光片切换器的驱动方式和机构多种多样,主要分电感线圈式和电机式:
A、电感线圈式又分线圈运动或磁铁运动。线圈驱动方式的体积小,造价低,但驱动力小,自锁能力差,线圈运动的寿命很短,而磁铁运动的寿命很长,钟摆运动方式的相对自锁能力较好,但不能驱动大尺寸滤光片的。
B、电机式又分齿轮齿条式、蜗轮蜗杆式和螺旋副式等。螺旋副式的结构紧凑,动力大,自锁力强,是一种较好的选择。
VCM(Voice Coil Motor)音圈马达
1、VCM概述:全称Voice Coil Montor,电子学里面的音圈电机,是马达的一种。因为原理和扬声器类似,所以叫音圈电机,具有高频响、高精度的特点。其主要原理是在一个永久磁场内,通过改变马达内线圈的直流电流大小,来控制弹簧片的拉伸位置,从而带动上下运动。手机摄像头广泛的使用VCM实现自动对焦功能,通过VCM可以调节镜头的位置,呈现清晰的图像。
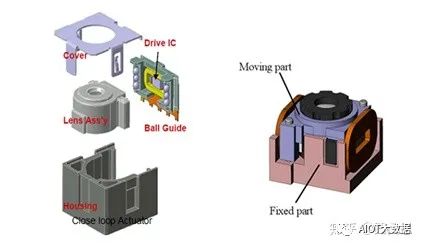
2、VCM主要构件:
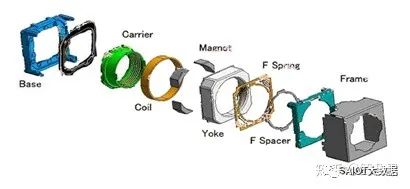
不同厂商的VCM结构略有差异,大致分几大部件如下:Shield Case:外壳 ;Frame:支架 ;F.Spacer:前垫片,用于绝缘;F.Spring:前簧片,用于承载载体,平衡力矩 ;Yoke:用于固定其他组件,导磁;Magnet:磁石,产生永久磁场 ;Coil:线圈,通电产生驱动力矩;Carrier:载体,用于承载镜头;B.Spacer:后垫片,用于绝缘;B.Spring:后弹簧,用于承载载体,平衡力矩 ;Base:底座,用于固定部件。
3、VCM作用:通过电感线圈产生不同方向和强度的磁场(弗莱明左手定则),
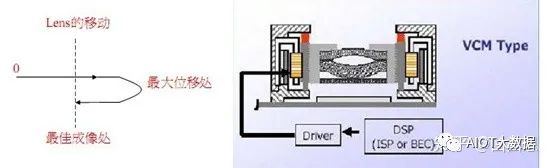
利用引力或斥力来推动镜头移动它靠簧片方式支持镜头伸缩,给Coil不同的电流,使Lens停在不同的点上面!手机摄像头的VCM需要Driver IC配合完成对焦,通过Driver IC控制VCM供电电流的大小,来确定VCM搭载的镜头移动的距离,从而调节到适当的位置拍摄清晰图像。镜头移动动作如下:
AF运行方式:进入自动调焦模式后,Driver从0到最大值,使得镜头从原地移动到最大位移处,此时sensor成像面自动拍摄图片并保存到DSP内,DSP通过这些图片,计算每一副图片的MTF(Modulation transfer function)值,从而在这条MTF曲线中找到最大值,并通过算法,得到这个点对应的电流大小,再一次指示Driver提供给音圈这个电流,而使镜头稳定在这个成像面,使得达到自动变焦。
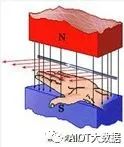
4、VCM工作原理:弗莱明左手法则。空中有一个磁场B,对横穿磁场的电线上通电,则电线上会产生力F。该力的强度公式为,F =BLI. 其中F:力[N];B:磁束密度[T];L:磁场中的电线长度[m];I:电流[A]。
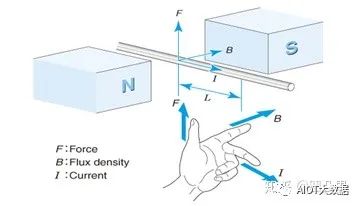
电线制成线圈,按图示方向通入电流I,则线圈的左侧、右侧会分别产生朝上、朝下的力,线圈开始旋转。这就是直流马达的旋转原理。
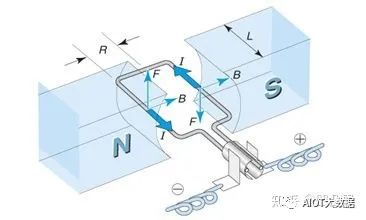
T =2RF = 2RNBLI; 其中T:扭矩[Nm];R:旋转半径[m];N:线圈圈数;L:磁通宽[m]。
直线型或是摆动型,他门基本原理相同。通点的导体穿过磁场的时候,会产生一个垂直于磁场线的力,这个力的大小取决于通过场的导体的长度,磁场及电流的强度。音圈马达产生的推力的大小取决于设计结构以及电流强度:F = B*L*I, 电流与产生的力的关系,在直线型音圈电机中体现为力敏感度Kf,在旋转型音圈马达中体现为扭力敏感度Kt。我們的设计中把Kf的单位定义为N/A,Kt的单位为N·M/A。音圈马达是一个简单的装置,将电流转化为机械力。所以其定位以及力的控制通过位置反馈装置以及控制器达成,其精度由控制器决定,与音圈马达本身毫无关系。
通过改变马达内线圈的直流电流大小,来控制弹簧片的拉伸位置,从而带动上下运动
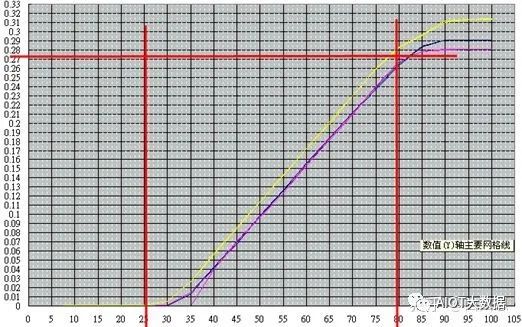
5、VCM的性能指标:VCM的性能主要是看电流和行程距离的比值。从启动电流开始,电流上升要和所能驱动的行程距离成比例,所需要上升电流越小,精度越高,同时还看最大耗电量,最大功率,尺寸大小。
6、VCM分类:
从结构上大致可分三类:(1)弹片式结构 ;(2)滚珠式结构;(3)摩擦式结构。
从功能上大致分为五类:(1)Open loop开马达; (2)Close loop闭环马达 ;(3)Alternate中置马达 ;(4)OIS光学防抖马达(分平移式、移轴式、记忆金属式等);(5) OIS+Close loop六轴马达 。
7、实现对焦的方法:
A:实现光学变焦采用变焦马达(ZOOM)
通过移动镜头内部的镜片来改变焦点的位置,改变镜头焦距的长短,并改变镜头的视角大小,从而实现影响的放大与缩小。
B:实现自动对焦采用对焦马达(AF)
过微距离移动整个镜头(而不是镜头内的镜片)的位置,控制镜头焦距的长短,而实现影像 的清晰.手机中常用的方法。
光学对焦和光学变焦是不同的概念:
光学变焦是通过移动镜头内部镜片的相对位置来改变焦点的位置,改变镜头焦距的长短,并改变镜头的视角大小,从而实现影像的放大与缩小;
光学对焦是实际上是调整整个镜头的位置(而不是镜头内的镜片)的位置,来控制像距,从而使成像最清晰。
(1)音圈马达;(2)超声波马达;(3)步进马达;(4)记忆合金马达;(5)液体镜头对焦;(6)液晶镜头对焦;(7)MEMS镜头对焦;(8)软件对焦(阵列式摄像头)。
实现摄像头对焦有很多方法,其中音圈马达使用最广泛。
8,VCM中微距和无穷远的关系。
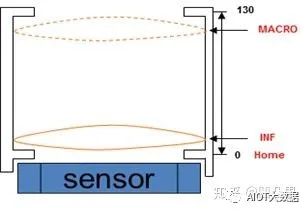
由于1/f=(1/dobj)+(1/dimg),微距时,dobj很小,所以dimg比较大;而无穷远时,dobj很大,所以dimg就需要比较小。
AF(Auto Focus)
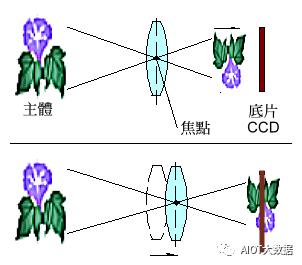
AF的光学原理:
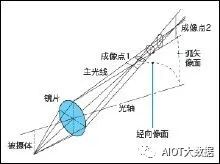
(1)透镜成像:成像点不一定落在焦平面上面,需要通过调整镜头,使成像点落在焦平面上面,使sensor清晰成像,这个过程就是聚焦过程。
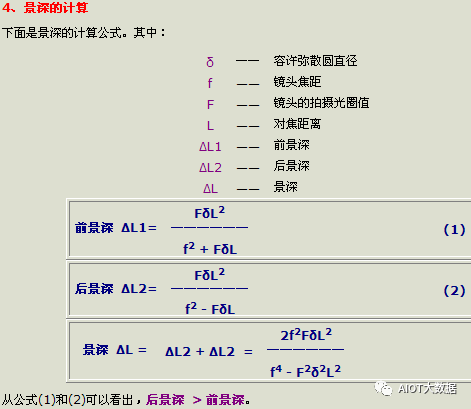
(2)景深:
A、容许弥散圆(Circle of confusion):在焦点前后,光线开始聚集和扩散,点的影像变成模糊的,形成一个扩大的圆,人眼能够辨认最小的圆称为容许弥散圆。
通常情况下,肉眼分辨率为1/2000~1/5000。人眼在明视距离(眼睛正前方30厘米)能够分辨的最小的物体大约为0.125mm。所以,弥散圆放大在7寸照片(这是个常用尺寸)也只能是0.125mm以内,也就是图像对角线长度的1/1730左右,这个1/1730左右的容许弥散圆大小对于任何大小的底片或者CCD都适用,因为它们放大出来的7寸照片,都可以将弥散圆控制在0.125mm。所以蔡斯公司制定的标准就是弥散圆直径=1/1730底片对角线长度 。
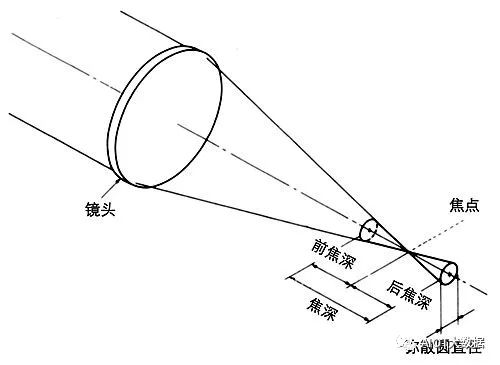
B、焦深和景深:焦点前后各有一个容许弥散圆,两个容许弥散圆之间的距离称为焦深,对应被摄物体对焦前后,其影像仍有一段清晰的范围,就称为景深。前后焦深不等,前后景深也不等,一般前焦深小于后焦深,后景深大于前景深。
景深随镜头的焦距、光圈值、拍摄距离而变化。对于固定焦距和拍摄距离,使用光圈越小,景深越大。
对于高斯透镜,物距So、像距Si、焦距f的有如下关系:
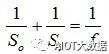
可见,可以通过改变物距,像距,或焦距,可以改变景深。
AF的基本方法:
(1)Lens-motion-type AF移动镜头:根据图像的清晰度(一般为边缘信息)或者物距信息,通过AF算法判断对焦情况,从而计算镜头的移动方向和大小,然后驱动电路使镜头移动来改变聚焦位置。
(2)Lens-modification-type AF改变焦距:通过liquid lens或者solid-state electro-optical devices这些可变焦的器件来改变镜头的焦长。
(3)Extended depth of field AF (EDOF)全焦技术:通过光学和数字信号处理技术集合,对光学信息编码,再用计算机信息处理技术解码,使得景深得到扩展,从而实现无运动部件的AF功能。
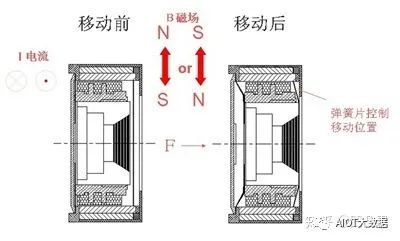
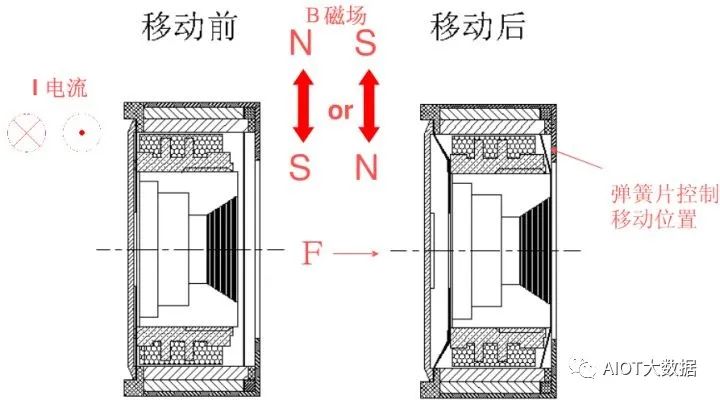
(4)手机摄像头多使用AF是VCM驱动镜头前后移动的方案。通过给线圈通电流,在永磁体的作用下,使镜头前后移动,同时前后两个弹簧片控制移动位置。
3、摄像头中AF系统示意图:
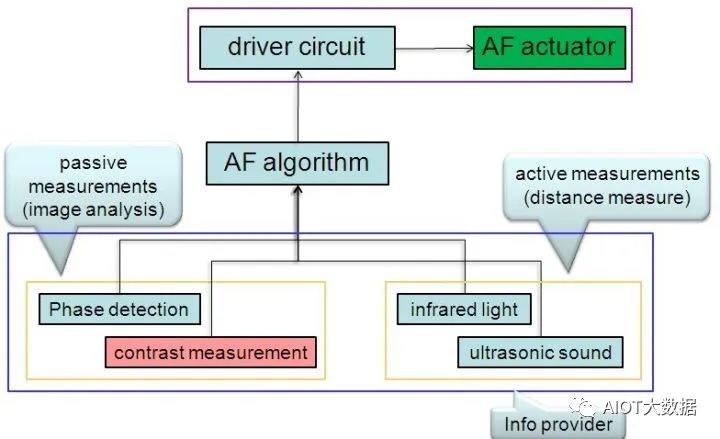
这里的AF算法的信息基础有被动式和主动式两类。
采用对比度法,手机摄像头的AF系统架构图如下:
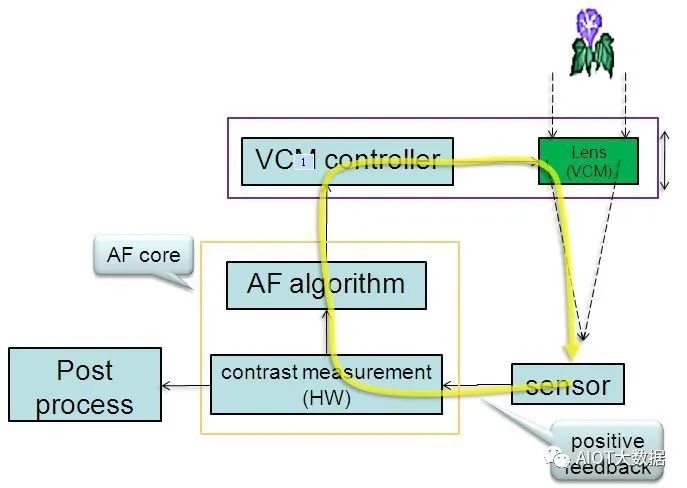
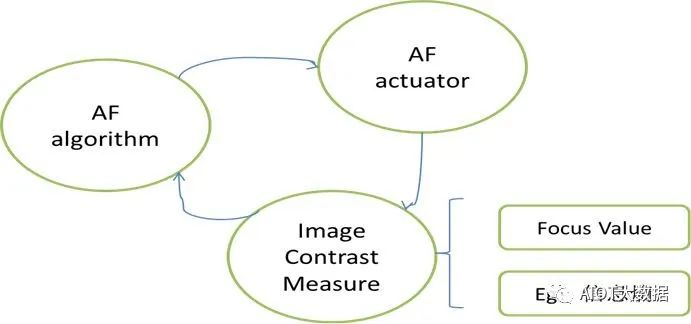
4、AF algorithm算法流程:
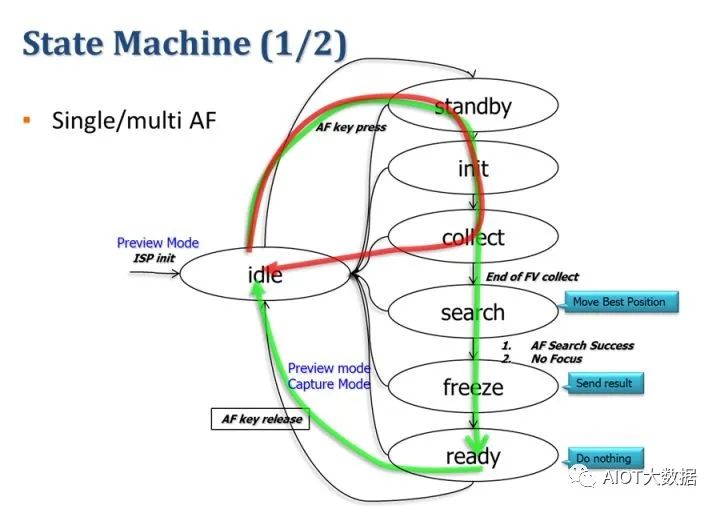
5、AF算法中信息收集(collect)方法:
基于镜头与被摄目标之间距离测量的测距方法。
A、三角测量法:由电路控制可动反光镜的转动,当透射光影和反射光影的重合时可以计算距离。
B、红外线测距法:由照相机主动发射红外线作为测距光源,并用红外发光二极管的转动代替可动反光镜的转动。需要一个获得当前照片对比度的设备来量测
超声波测距法:该方法是根据超声波在摄像机和被摄物之间传播的时间进行测距的
激光测距法:
基于调焦屏上成像清晰的聚焦检测方法。
A、对比度法 :手机上通过获得照片的Focus Value (Edge)来判断当前位置的清晰度,通过检测影像的轮廓边缘实现自动调焦的。
B、相位法PDAF。该方法是通过检测像的偏移量实现自动调焦的。
6、AF算法中图像清晰度评价方法:图像的清晰度直接反映了摄像头聚焦与否。
(1)常用的图像清晰度评价方法:
A、图像统计:
灰度熵法(灵敏度不高) ;
pi是图像中灰度值为i的像素出现的概率,L为灰度级总数
灰度方差法 – SMD filter ;
直方图法。
B、图像边缘检测:
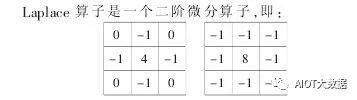
Laplacian算子(中心算子);
Sobel算子(highpass filter) (有一个水平方向算子,一个垂直方向算子,取最大值);
Robert算子(一个左上右下对角线算子,一个右上左下对角线算子) ;
Prewitt算子(有一个水平方向算子,一个垂直方向算子,取最大值)
C、空间域特征 :tenengrad filter(能量梯度函数)。
(2)函数举例:
能量梯度函数:

Laplace算子:
模数偏差总和SMD(sum-modulus-difference)算 子:

7、AF算法中找最佳对焦点的方法:
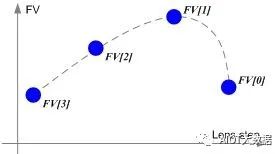
(1)测得局部最大值peak点(FV):计算当前Step对应的FV值,判断当前FV值是不是在此前连续记录的四个step点FV值中的最大值,是最大值的话,就再判断它是否大于next Step点的FV值。用此方法判断极大值点,若有噪声造成step-FV曲线的微小波动,则通过各波动区域的极大值点对比,以最大值作为局部的MAX点。
(2)拟合曲线获取最佳对焦位置:因为step并不连续,测得Peak点的可能并不是真正最佳的对焦点,此时可通过poly fit曲线拟合的方法来找peak点。对于step-FV曲线采用

就可以近似拟合,采用max point点和前、后相邻两个点,共三个点采用最小二乘法拟合抛物线。将抛物线的顶点最为最佳对焦点,反馈给VCM控制电路来驱动Lens移动到最佳对焦位置。
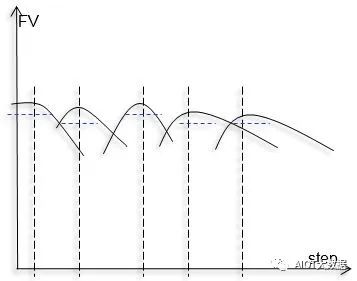
8、AF Table:
根据不同距离处物体在sensor上成像的边缘信息即FV(Focus Value)值,绘制多条step-FV曲线。图中虚线表示每个物距处,图像认为清晰时可接受的最小FV值,虚线以上FV对应景深范围内物体成像信息。
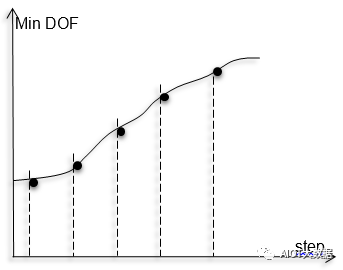
根据上图绘制对应的step-DOF(Depth Of Field)曲线
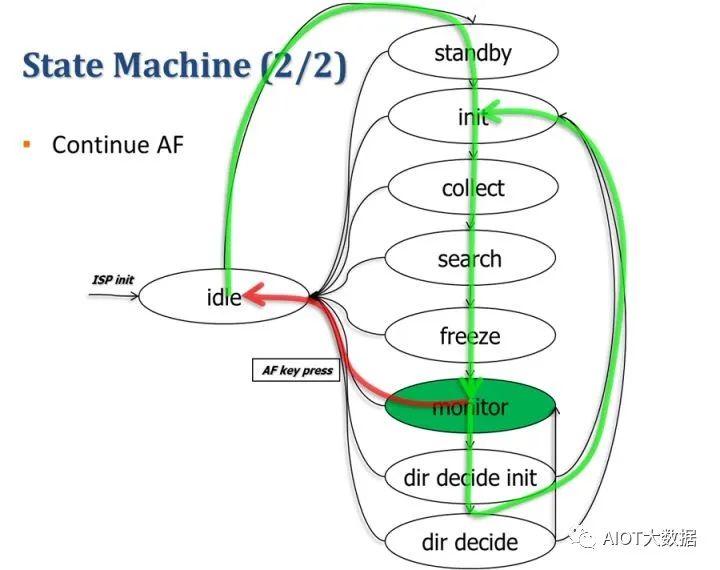
9、连续对焦:连续对焦中并不是找到焦点就停止,而是根据场景的变化不停的找最佳对焦位置,这样就需要判断镜头移动方向,这里也是主要使用爬山算法。
10, YUV AF introduction
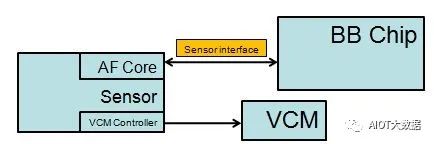
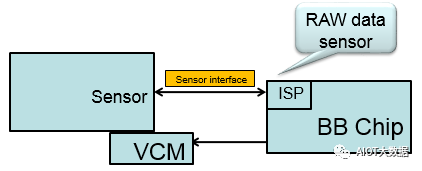
11, RAW AF introduction
Poly fit: 根据max point以及max point左右两个FV最大点来模拟抛物线, 求出抛物线的顶点即为最佳对焦点
如何预测curve最高点呢?
Gauss elimination: 高斯消除: 解一元二次方程,求出顶点的x和y坐标。
来源:AIOT大数据
本文仅做学术分享,如有侵权,请联系删文。