
超越“前人”,仅7.8毫米!新型无线水陆两用折纸机器人能翻能滚
但是,事实并非这样。
在机器人的世界中,还有一类特别小(或许只有纳米级)、但非常灵活的微型机器人。它们不仅能够在液态环境中行动自如,完成拾取和运输物体等任务,而且还可以由磁场和光驱动,具备非常高的速度、精确度和敏捷性。
由于体型小、功能多样,微型机器人已经成为当前机器人领域的研究热点之一,有望执行各种任务,具有多种生物医学应用潜能。
但是,现有折纸机器人需要复杂系统来实现多功能性,而且运动模式有限,无法同时实现在陆地和水中的移动。
如今,来自斯坦福大学的研究团队解决了这一问题,他们研发出了一种新型无线水陆两用毫米级折纸机器人。
相关研究论文以“Spinning-enabled wireless amphibious origami millirobot”为题,发表在科学期刊《自然-通讯》(Nature Communications)上。
 来源:Nature Communications
来源:Nature Communications近几十年来,尽管非处方药已经治愈了许许多多的疾病,但科学家们也一直在探索能够精准治疗心血管疾病、癌症等复杂疾病的靶向药物的递送方法,而微型机器人就是其中的重要方向之一。
与吞服药丸或注射液体不同,递送药物的微型机器人会一直保留药物,直到到达目标,然后释放出高浓度药物。
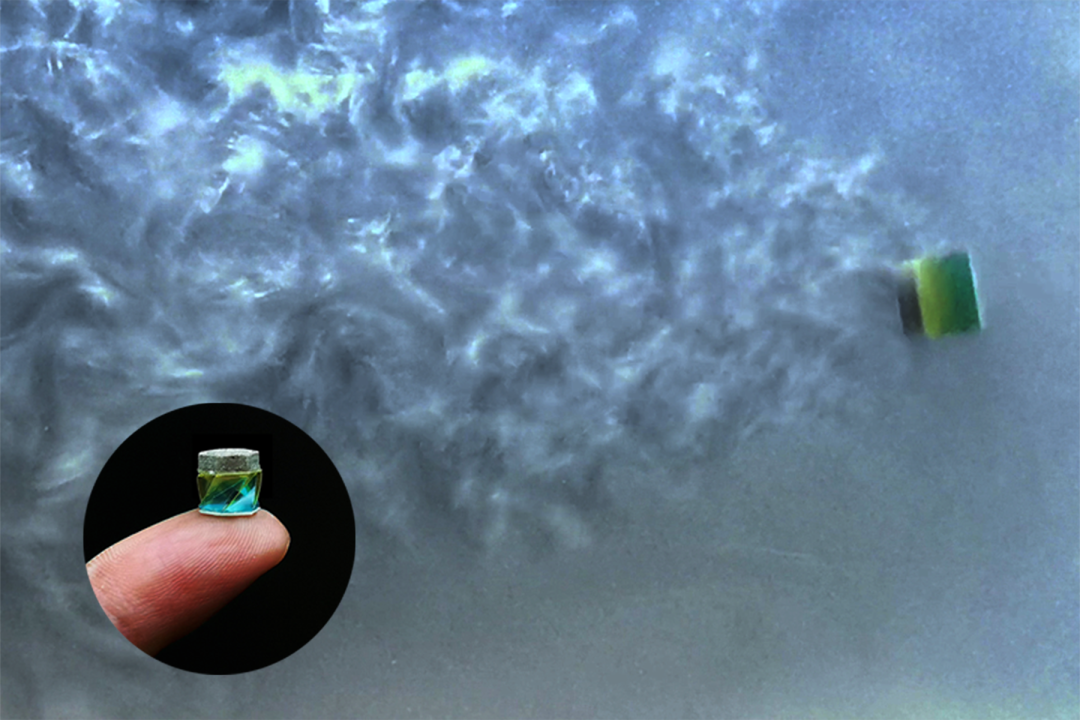
在此次研究工作中,新型毫米级折纸机器人的截面直径仅有 7.8 毫米,由 Kresling 折纸(三角构成的空心圆柱体)样式和附着的磁铁盘构成。
同时,利用 Kresling 折纸的折叠/展开能力,新型毫米级折纸机器人不仅可以实现滚动、翻转和旋转等动作,还可以通过泵送来递送液体药物。
研究团队还强调,旋转动作提供的一种吸附机制可用于运送货物。
如下图所示,新型毫米级折纸机器人具备沿着特定轨迹运动或递送药物的能力。
而且,新型毫米级折纸机器人无论是在水上、水面和水下,还是在充满粘液的猪胃内,都可以正常工作。
除了研究折叠如何使机器人能够执行某些动作之外,研究团队还考虑了每个折叠的确切形状的尺寸如何影响机器人在未折叠时的刚性运动。
新型毫米级折纸机器人的另一个独特设计是某些几何特征的组合,中心的纵向孔和侧面向上倾斜的横向狭缝可以降低液体阻力,从而保证机器人更好地移动。
据介绍,该机器人不仅可以提供一种有效分配药物的便捷方式,还可以用于将仪器或相机携带到体内,从而改变医生检查病人的方式。
此外,研究团队还致力于使用超声波成像的方式来跟踪该机器人的运动,因而不需要切开器官。
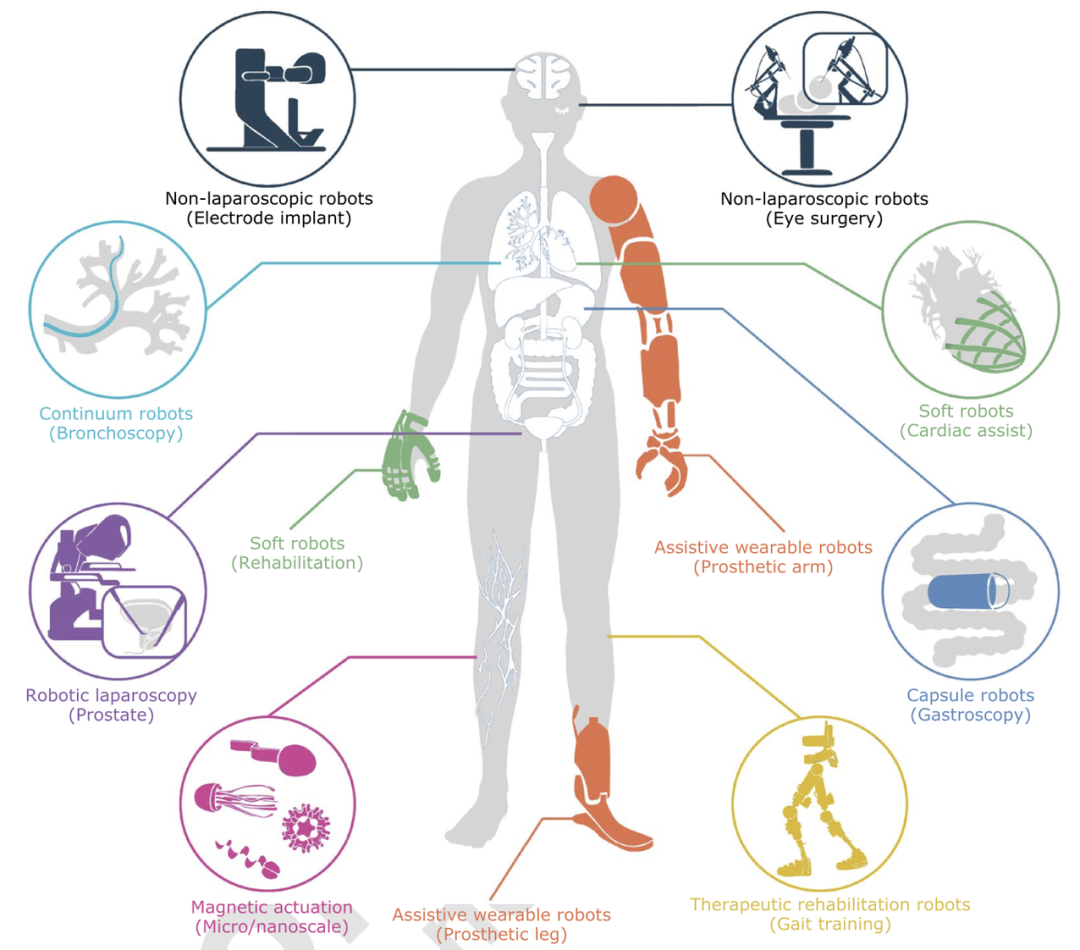
去年 11 月,哈佛医学院在一篇综述文章中分析了 2010-2020 年期间医疗机器人领域中的 8 个关键研究主题,并回顾了科学家们 10 年中在医疗机器人领域取得的众多激动人心的进展。
8 个关键科研主题分别为:机器人腹腔镜、用于微创手术的非腹腔镜机器人、辅助穿戴式机器人、治疗康复机器人、胶囊机器人、磁驱动机器人、软体机器人和连续体机器人。
自 1990 年以来,在 19000 多篇关于医疗机器人技术的工程论文中,只有少数几篇可以被认为能够用于现有的商业医疗机器人,即使是具有高技术影响力的论文,其专利引用数量也不多。
在某种程度上,造成这种现象的原因可能是由于技术开发与对应商业应用之间存在的严重滞后,或者是技术研究与医疗器械商业化现实之间的不匹配。
因此,将机器人技术应用于临床所需,不仅仅是撰写被广泛引用的研究文章,而是必须确定真正的临床需要,必须开发相关技术来满足这些需求。
当前磁驱动的发展趋势表明,磁端导管和内窥镜的研究也正在回归其根源,科学家或将以更小的规模生产出比复杂的拉线或电机设备更经济的可操作医疗设备,它们可以无害地穿透整个人体。
下一个 10 年,我们或将可以看到磁驱动机器人技术催化出更有效的医疗治疗,从而加速商业落地与临床应用。
参考资料:
https://www.nature.com/articles/s41467-022-30802-w
https://news.stanford.edu/press/view/44011
https://mp.weixin.qq.com/s/woC7712grcw1IzHKLF6Pig

评论