
对于农业发展,机器人能做些什么?
点击下方 卡片 ,关注“ 新机器视觉 ”公众号
视觉/图像重磅干货,第一时间送达
“海克斯科技”
“我一勺三花淡奶”
“全是科技与狠活儿啊,哥们儿”
“不能多加,多加了就要‘倒沫子’了! ”
对于这些曾经爆火的网络热词,想必大家还仍然还留有深刻印象,去年在知名美食打假博主“辛吉飞”和“刘 怂”的宣传下,食品行业添加剂内幕被暴露、揭秘,食品安全问题引起人们重视。
“天然食品”“自己买菜做饭”一时间成为热流, 人们对食用更多天然和有机食品的偏好迅速增加,这迫使农业工业在处理杂草时使用更少的农业化学品,同时保持作物的质量和数量。

在传统耕地耕作中, 由于杂草会与作物在土壤中竞争养分导致产量降低,大多数农民都会使用除草剂等化学药剂来控制、消除杂草。这种方式虽然迅捷有效,但同时也导致了越来越多的杂草种类“升级进化”,抗除草剂性大大提升。此外,过多化学药剂的使用通过增加土壤侵蚀和水污染对环境产生了负面影响,在植物表面也有所残留。
对农业而言,如何使用更清洁、环保、健康的策略来控制杂草、消除害虫并跟踪作物的状况已成为行业未来发展的重要方向。
在过去十年,基于机器人平台的杂草管理技术虽受到关注,但由于该工作内容涉及不同作物、杂草种类、杂草分布和生长周期、生长环境以及对作物的影响等内容,且多以来于深度学习,因此进展缓慢且效果并不理想。
近日,波恩大学的一组研究人员开发了一个能够进行现场检测和杂草管理的平台BonnBot-I,为帮助农民更有效地管理杂草和监测农作物带来新的可能。
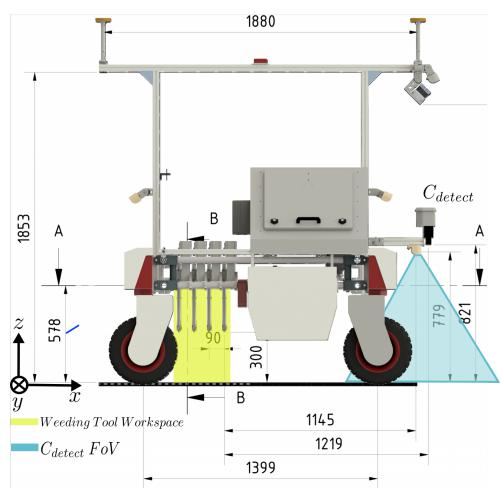
据了解,BonnBot-I。基础平台是一个轻型四轮驱动(4WD)和四轮转向(4WS)系统的横向系统。为了确保平台能够符合欧洲农业标准的行间距离,且可监测主要作物(甜菜 、小麦和玉米)的不同生长周期,和有足够的空间来安装复制的除草工具,该团队将横向系统车轮中心到车轮中心的宽度设置为1.5米,垂直间隙设置为0.57m,长度设置为1.39米。
同时,该团队为BonnBot-I 配置了“定位和导航”、“机器人视觉”两套传感器, 在一系列传感器的加持下,BonnBot-I不仅增强了最近发布的现场监测技术的能力 ,工厂计数性能也得到了提高,将归一化绝对误差从8.3%降低到3.5%,降低到3.5%,降低了一半以上。
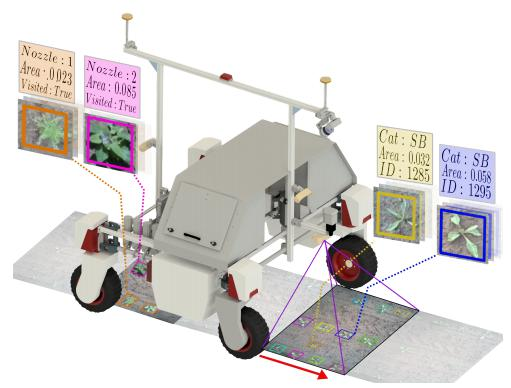
在末端执行器的部署方面, BonnBot-I采用了独立控制的高分辨率伊格斯线性算法,并配置有点喷喷嘴、机械套管、除草工具等不同末端,能够改变针对当前土壤和杂草种群的工具。
其线性执行器和喷雾法控制可使用ROS操作的树莓派3b,并确保最小动作延迟,系统中每个喷头的最终运行时间总计为10-12ms。
其所配置的新型除草工具由一组复制的线性执行器组成,并通过干预控制器单元进行控制,可实现高精度的专业级现场干预,
在实验测试环节, 该团队使用基于ROS的一对一尺度模拟和种专门为清除应用程序和干预驾驶目的而开发的原生python模拟器两种不同类型的周模拟框架进行测试。
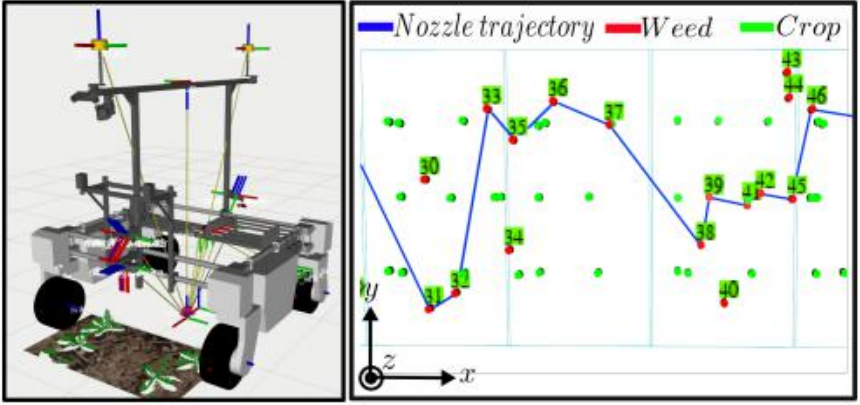
基于ros的仿真模型的演示(图左),其中所有传感器和执行器都处于激活状态。田间生成器允许团队创建具有不同植物大小和作物形状的行作物田,模拟一个真实的田间。为了评估除草算法,团队还开发了一个基于Python的原生框架,它能够模拟机器人的运动学,并生成具有不同杂草分布的合成作物行。这个框架使用Open3D和Pyglet python库来渲染图形,图中显示了一个简化的规划场景示例视图(图右)。团队使用这个环境来实现和评估不同的除草策略。
除却杂草管理功能之外, BonnBot-I还可以穿越现场时监视现场的状态 ,这补充了它作为除草平台的关键功能。通过使用Mask-RCNN提供基于实例的分割、物种级信息(e。g.作物和杂草种类)和可见的表面积,并利用车轮测程法和相机参数利用帧之间的重投影,BonnBot-I能够更准确地跟踪场景中的物体。测程仪和GPS信息与EKF的融合则提高了BonnBot-I现场检测的精确性。
截止目前,该团队已在模拟田地中评估了 BonnBot-I 机器人,该田地反映了实际田地中农作物的典型分布 。他们的初步发现很有希望,表明他们的 机器人 最终可能成为对农民有用的技术。未来,该团队可以使用BonnBot-I的物理原型在现实环境中进行进一步的测试,以进一步验证其潜力。
来源:机器人大讲堂
声明: 部分内容来源于网络,仅供读者学习、交流之目的。 文章版权归原作者所有。 如有不妥,请联系删除。
—THE END—