
三维点云的经典算法与前沿技术有哪些?
三维点云是最重要的三维数据表达方式之一。
从技术角度看,SLAM、三维重建、机器人感知等领域,点云都是最简单且最普遍的表达方式:相对于图像,点云有其不可替代的优势——深度,即三维点云直接提供了三维空间的数据,而图像则需要通过透视几何来反推三维数据。
从应用角度看,上至无人驾驶中的激光雷达,下至微软Kinect、iPhone FaceID以及各种各样的AR/VR应用,都需要基于点云的数据处理,比如物体检测、人脸识别、人体姿态估算等。
三维点云处理并不容易,首先,三维点云比图像多了一个维度;其次,点云是不规则分布的,比图像式的规整网格更难处理;然后,点云缺少了图像中的纹理,导致了在语义分析方面的困难。同时,由于三维点云的应用面非常广,所以点云处理所涉及的算法也多种多样,涵盖了机器人、计算机视觉的各个分支。
然而,对比点云处理的庞大需求以及较高技术难度,更难的是目前鲜有针对三维点云的系列课程。伙伴们更容易陷入“调参”,只知表面不懂原理的艰难境地。
基于此,深蓝学院今年4月开设了『三维点云处理』课程,并且两期课程以来,深受广大学员好评。近期又有很多伙伴咨询新一期的开课安排,为此,经过课程组与授课讲师沟通,决定于10月23日开设第3期,欢迎各位伙伴报名,共同学习!
01
通过课程,可以有哪些收获
对三维点云这一领域有全方位的认知,了解三维感知的各种问题及解决方案。
深入理解各个经典点云算法,比如octree,ICP,PointNet等,并且在真实数据集上实现、应用这些算法。
涉猎最前沿的感知(Perception)方向的深度学习算法,比如物体检测、点云配准、特征提取等,了解学术界的热点问题及发展趋势。
了解实际应用中各种算法的优势及局限,对于具体问题如何选择合适的算法,以及如何修改算法应对长尾/边缘问题(longtail/edge cases)。
02
实力讲师,课程保障

黎嘉信
自动驾驶研究科学家
新加坡国立大学(NUS)博士
03
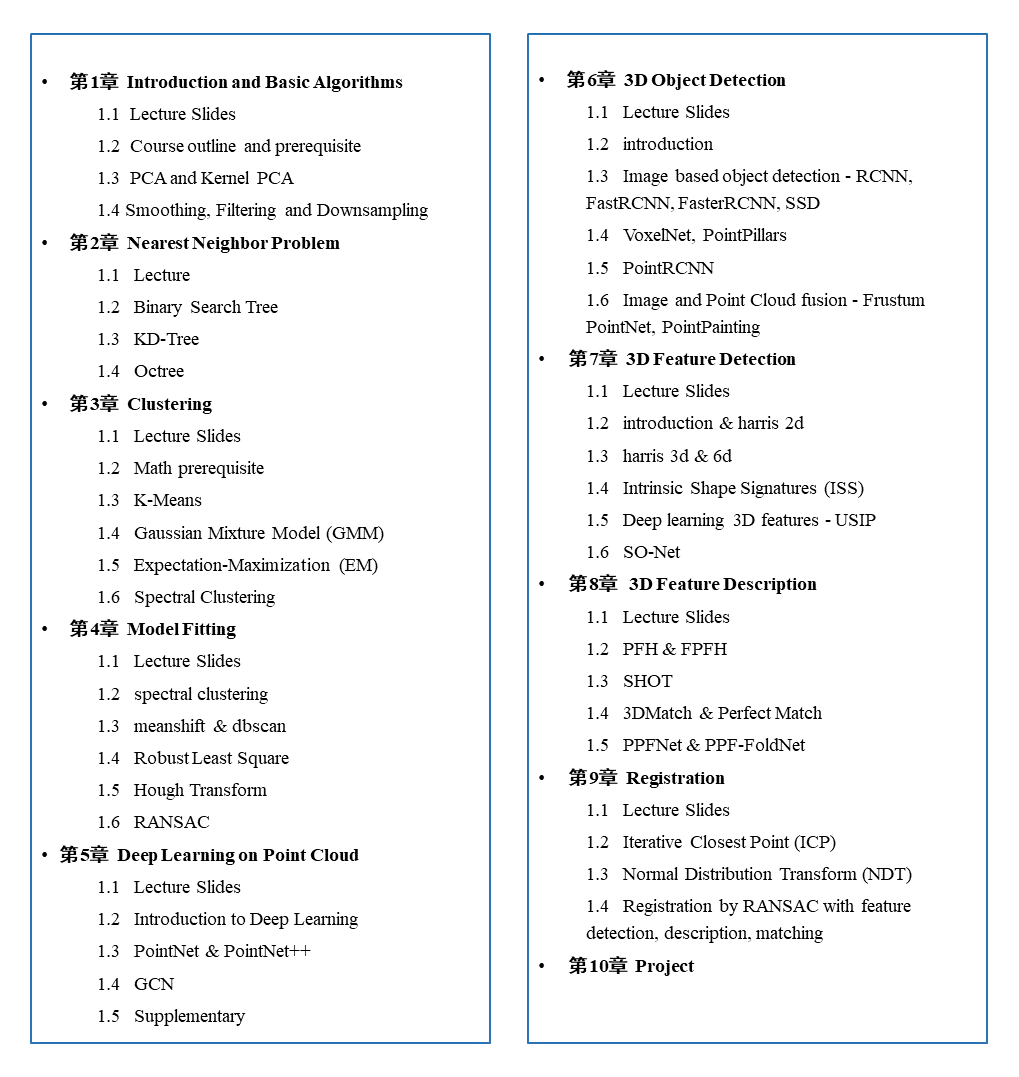
系统科学的学习计划
( 中文授课 )
04
优质服务,为你保驾护航!
1、社群答疑
课程建立答疑群,高效获取疑问解答的同时,结识更多同领域的伙伴。
2、“三师”助力
班主任督促学习、助教及时批改作业并配合讲师微信群答疑,及时解惑,高效学习。
(向右滑动查看更多答疑内容)
< 三维点云第二期课程答疑群截图 >
3、作业迭代
提交作业,助教批改后,根据助教意见对作业进行迭代修改;没有最好,只有更好!
4、定期班会
每期班会,助教对作业进行讲评和指导;在班会中,学习更多技巧;在交流中,收获更多思路。