
三维点云处理很难?分享经典点云算法;octree,ICP,PointNet等
最近我在学习三维点云的知识,包括点云聚类、模型拟合、基于点云的物体检测、点云特征提取与描述、点云配准等内容,尝试做了一些小项目,比如地面检测、聚类。效果图如下:
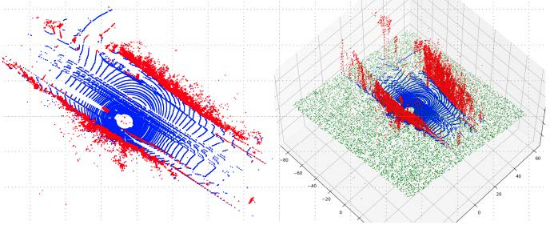 上图一蓝色点为地面,红色点为outliers;左图为open3d的地面检测结果,右图为自己设计的算法。
上图一蓝色点为地面,红色点为outliers;左图为open3d的地面检测结果,右图为自己设计的算法。
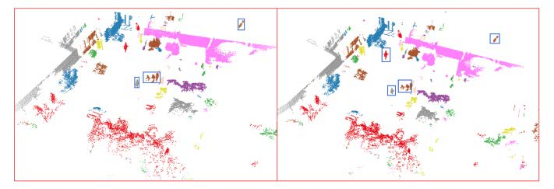 上图二为点云聚类的结果,左图为自己实现的算法,右图为调用现成的API,效果基本一致。 为什么要学习三维点云呢? 三维点云是最重要的三维数据表达方式之一,它广泛应用于计算机视觉、自动驾驶、机器人等领域,比如环境感知、物体检测、点云分割、姿态估计等。 我是怎么学习三维点云的?
上图二为点云聚类的结果,左图为自己实现的算法,右图为调用现成的API,效果基本一致。 为什么要学习三维点云呢? 三维点云是最重要的三维数据表达方式之一,它广泛应用于计算机视觉、自动驾驶、机器人等领域,比如环境感知、物体检测、点云分割、姿态估计等。 我是怎么学习三维点云的?
三维点云的书籍寥寥无几,网上资料也比较零散,国内外系统讲解三维点云算法原理及配套实践的课程更是屈指可数。经朋友推荐,我报名了深蓝学院的『 三维点云处理 』课程。这门课程一共9个实践项目,从理论学习应用到代码实践。通过这门课,我对经典算法的理论有了清晰的认识,自己能实现这些算法,而不是简单调用一个API而已。上面的地面检测以及点云聚类就是课程的项目 之一。 (三维点云处理课程开篇语-黎嘉信)
 黎嘉信
黎嘉信
上图一蓝色点为地面,红色点为outliers;左图为open3d的地面检测结果,右图为自己设计的算法。 上图二为点云聚类的结果,左图为自己实现的算法,右图为调用现成的API,效果基本一致。 为什么要学习三维点云呢? 三维点云是最重要的三维数据表达方式之一,它广泛应用于计算机视觉、自动驾驶、机器人等领域,比如环境感知、物体检测、点云分割、姿态估计等。 我是怎么学习三维点云的? 三维点云的书籍寥寥无几,网上资料也比较零散,国内外系统讲解三维点云算法原理及配套实践的课程更是屈指可数。经朋友推荐,我报名了深蓝学院的『 三维点云处理 』课程。这门课程一共9个实践项目,从理论学习应用到代码实践。通过这门课,我对经典算法的理论有了清晰的认识,自己能实现这些算法,而不是简单调用一个API而已。上面的地面检测以及点云聚类就是课程的项目 之一。 (三维点云处理课程开篇语-黎嘉信)
扫码添加,了解详情
咨询请备注【 926 】,优先通过!
1
课程讲师
黎嘉信 高仙机器人深度学习与融合感知负责人
2014年清华大学本科毕业,2018年新加坡国立大学博士毕业,师从陈本美教授和Lee Gim Hee教授。此前历任Motional感知科学家和夜间驾驶负责人、字节跳动Al Lab视觉科学家。以第一作者发表多篇计算机视觉/机器人顶级会议论文,包括CVPR、ICCV、ICRA、IROS等。
2
课程大纲 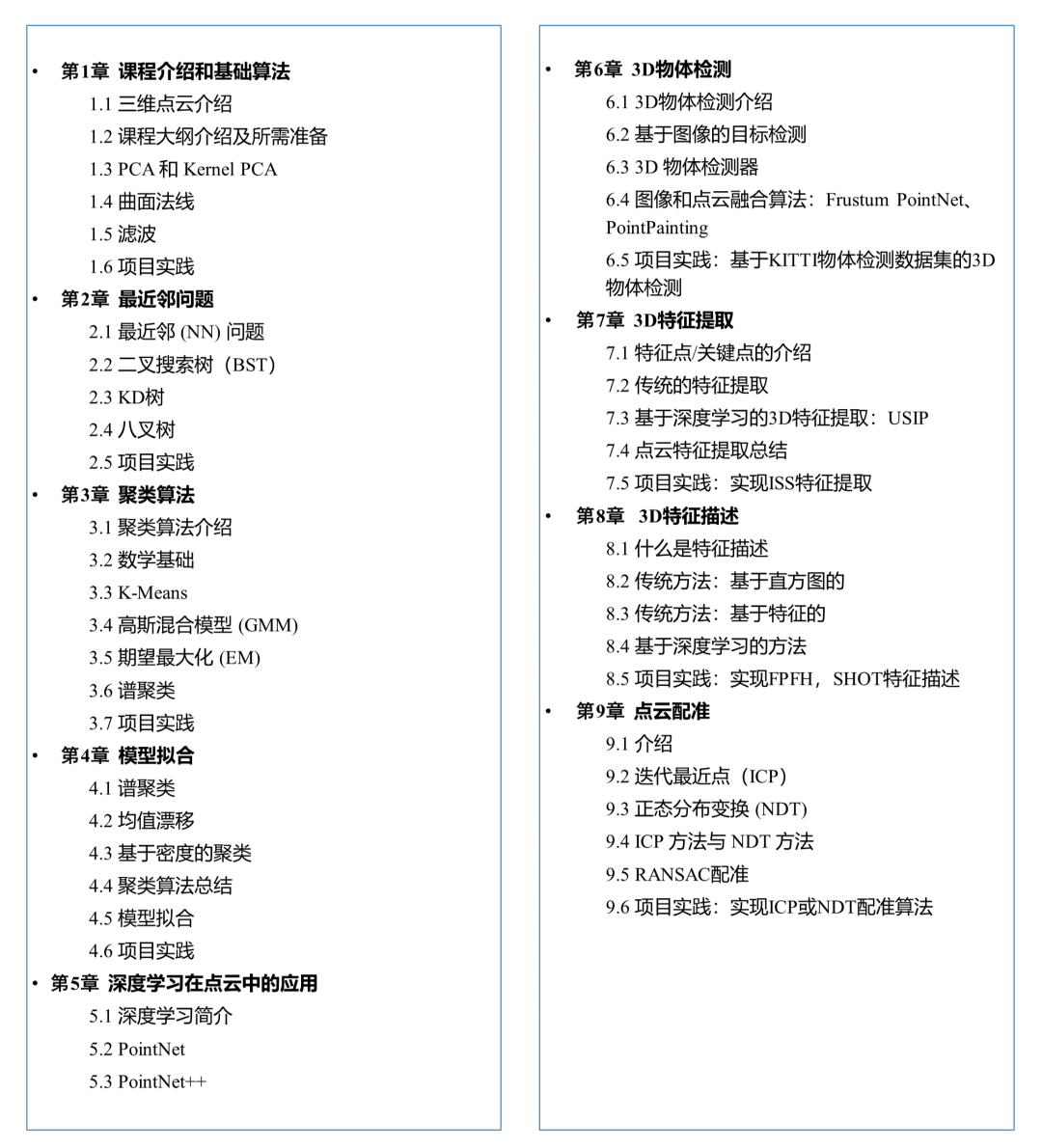
(本课程中文授课,点击图片查看大图)
3
实践项目 本门课程采用理论与实践相结合的教学方式,通过 9个 实践项目,让大家将课上所学知识,即学即用,通过亲自动手实践达到灵活掌握,融会贯通的效果。 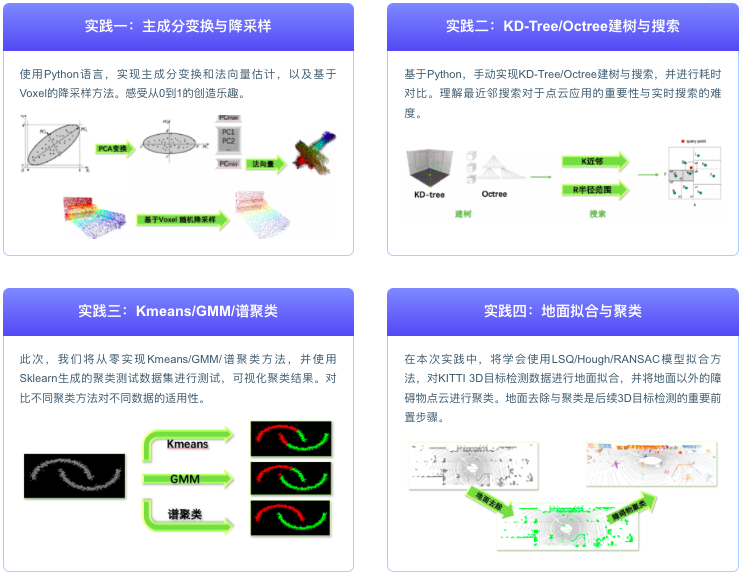

4
学后收获1. 对三维点云这一领域有全方位的认知,了解三维感知的各种问题及解决方案;
2. 深入理解各个经典点云算法,比如octree,ICP,PointNet等,并且在真实数据集上实现、应用这些算法;
3. 涉猎最前沿的感知(Perception)方向的深度学习算法,比如物体检测、点云配准、特征提取等,了解学术界的热点问题及发展趋势;
4. 了解实际应用中各种算法的优势及局限,对于具体问题如何选择合适的算法,以及如何修改算法应对长尾/边缘问题(longtail/edge cases)。抢占学习名额
扫码添加,了解详情
咨询请备注【 926 】,优先通过!
扫码添加客服 『书哲』
评论