
项目实践 | 从零开始边缘部署轻量化人脸检测模型——训练篇



1简介
该模型是针对边缘计算设备设计的轻量人脸检测模型。
在模型大小上,默认FP32精度下(.pth)文件大小为 1.04~1.1MB,推理框架int8量化后大小为 300KB 左右。 在模型计算量上,320x240的输入分辨率下 90~109 MFlops左右。 模型有两个版本,version-slim(主干精简速度略快),version-RFB(加入了修改后的RFB模块,精度更高)。 提供320x240、640x480不同输入分辨率下使用widerface训练的预训练模型,更好的工作于不同的应用场景。
2数据处理
2.1 输入尺寸的选择
由于涉及实际部署时的推理速度,因此模型输入尺寸的选择也是一个很重要的话题。
在作者的原github中,也提到了一点,如果在实际部署的场景中大多数情况为中近距离、人脸大同时人脸的数量也比较少的时候,则可以采用的输入尺寸;
如果在实际部署的场景中大多数情况为中远距离、人脸小同时人脸的数量也比较多的时候,则可以采用或者的输入尺寸;
这里由于使用的是EAIDK310进行部署测试,边缘性能不是很好,因此选择原作者推荐的最小尺寸进行训练和部署测试。
注意:过小的输入分辨率虽然会明显加快推理速度,但是会大幅降低小人脸的召回率。
2.2 数据筛选
由于widerface官网数据集中有比较多的低于10像素的人脸照片,因此在这里选择剔除这些像素长宽低于10个pixel的照片;

这样做的原因是:不清楚的人脸,不太利于高效模型的收敛,所以需要进行过滤训练。
3SSD网络结构
SSD是一个端到端的模型,所有的检测过程和识别过程都是在同一个网络中进行的;同时SSD借鉴了Faster R-CNN的Anchor机制的想法,这样就像相当于在基于回归的的检测过程中结合了区域的思想,可以使得检测效果较定制化边界框的YOLO v1有比较好的提升。
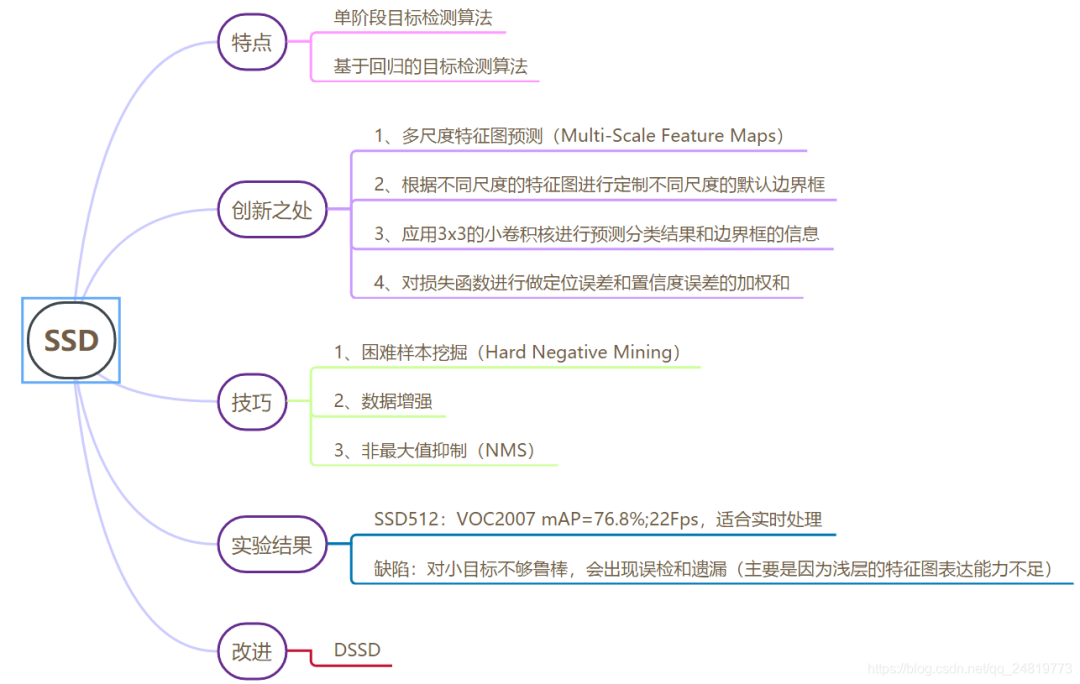
SSD较传统的检测方法使用顶层特征图的方法选择了使用多尺度特征图,因为在比较浅的特征图中可以对于小目标有比较好的表达,随着特征图的深入,网络对于比较大特征也有了比较好表达能力,故SSD选择使用多尺度特征图可以很好的兼顾大目标和小目标。
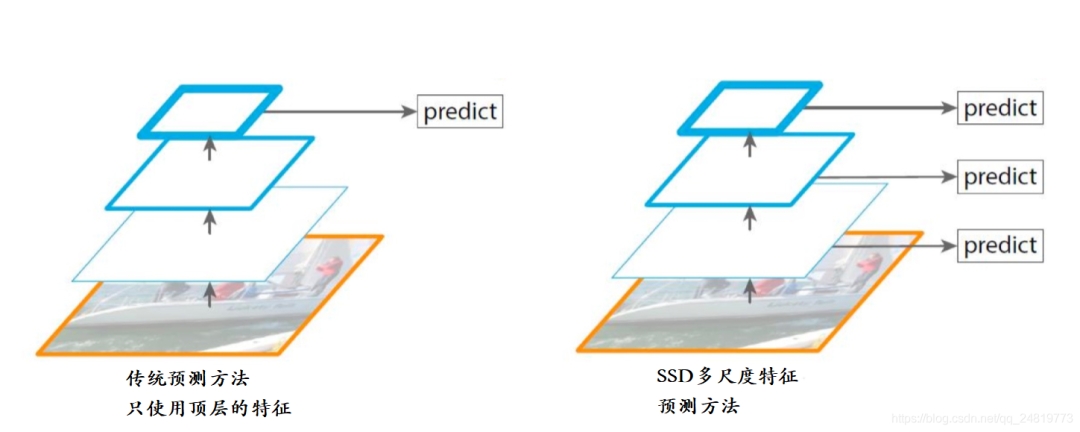

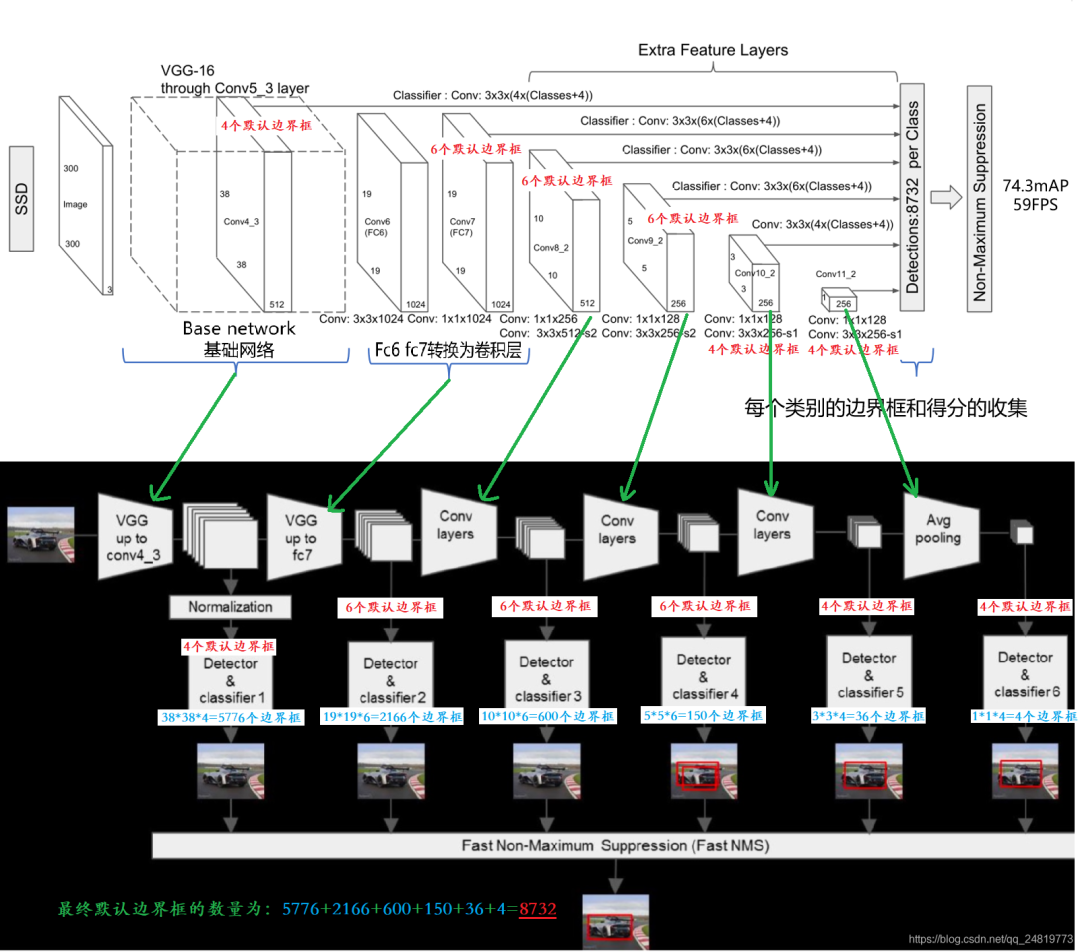
SSD模型结构如下:
这里关于SSD不进行更多的阐述,想了解的小伙伴可以扫描下方的二维码查看(是小编在CSDN的记录,非常详细!!!):
整个项目模型搭建如下:
# 网络的主题结构为SSD模型
class SSD(nn.Module):
def __init__(self, num_classes: int, base_net: nn.ModuleList, source_layer_indexes: List[int],
extras: nn.ModuleList, classification_headers: nn.ModuleList,
regression_headers: nn.ModuleList, is_test=False, config=None, device=None):
"""Compose a SSD model using the given components.
"""
super(SSD, self).__init__()
self.num_classes = num_classes
self.base_net = base_net
self.source_layer_indexes = source_layer_indexes
self.extras = extras
self.classification_headers = classification_headers
self.regression_headers = regression_headers
self.is_test = is_test
self.config = config
# register layers in source_layer_indexes by adding them to a module list
self.source_layer_add_ons = nn.ModuleList([t[1] for t in source_layer_indexes
if isinstance(t, tuple) and not isinstance(t, GraphPath)])
if device:
self.device = device
else:
self.device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
if is_test:
self.config = config
self.priors = config.priors.to(self.device)
def forward(self, x: torch.Tensor) -> Tuple[torch.Tensor, torch.Tensor]:
confidences = []
locations = []
start_layer_index = 0
header_index = 0
end_layer_index = 0
for end_layer_index in self.source_layer_indexes:
if isinstance(end_layer_index, GraphPath):
path = end_layer_index
end_layer_index = end_layer_index.s0
added_layer = None
elif isinstance(end_layer_index, tuple):
added_layer = end_layer_index[1]
end_layer_index = end_layer_index[0]
path = None
else:
added_layer = None
path = None
for layer in self.base_net[start_layer_index: end_layer_index]:
x = layer(x)
if added_layer:
y = added_layer(x)
else:
y = x
if path:
sub = getattr(self.base_net[end_layer_index], path.name)
for layer in sub[:path.s1]:
x = layer(x)
y = x
for layer in sub[path.s1:]:
x = layer(x)
end_layer_index += 1
start_layer_index = end_layer_index
confidence, location = self.compute_header(header_index, y)
header_index += 1
confidences.append(confidence)
locations.append(location)
for layer in self.base_net[end_layer_index:]:
x = layer(x)
for layer in self.extras:
x = layer(x)
confidence, location = self.compute_header(header_index, x)
header_index += 1
confidences.append(confidence)
locations.append(location)
confidences = torch.cat(confidences, 1)
locations = torch.cat(locations, 1)
if self.is_test:
confidences = F.softmax(confidences, dim=2)
boxes = box_utils.convert_locations_to_boxes(
locations, self.priors, self.config.center_variance, self.config.size_variance
)
boxes = box_utils.center_form_to_corner_form(boxes)
return confidences, boxes
else:
return confidences, locations
def compute_header(self, i, x):
confidence = self.classification_headers[i](x)
confidence = confidence.permute(0, 2, 3, 1).contiguous()
confidence = confidence.view(confidence.size(0), -1, self.num_classes)
location = self.regression_headers[i](x)
location = location.permute(0, 2, 3, 1).contiguous()
location = location.view(location.size(0), -1, 4)
return confidence, location
def init_from_base_net(self, model):
self.base_net.load_state_dict(torch.load(model, map_location=lambda storage, loc: storage), strict=True)
self.source_layer_add_ons.apply(_xavier_init_)
self.extras.apply(_xavier_init_)
self.classification_headers.apply(_xavier_init_)
self.regression_headers.apply(_xavier_init_)
def init_from_pretrained_ssd(self, model):
state_dict = torch.load(model, map_location=lambda storage, loc: storage)
state_dict = {k: v for k, v in state_dict.items() if not (k.startswith("classification_headers") or k.startswith("regression_headers"))}
model_dict = self.state_dict()
model_dict.update(state_dict)
self.load_state_dict(model_dict)
self.classification_headers.apply(_xavier_init_)
self.regression_headers.apply(_xavier_init_)
def init(self):
self.base_net.apply(_xavier_init_)
self.source_layer_add_ons.apply(_xavier_init_)
self.extras.apply(_xavier_init_)
self.classification_headers.apply(_xavier_init_)
self.regression_headers.apply(_xavier_init_)
def load(self, model):
self.load_state_dict(torch.load(model, map_location=lambda storage, loc: storage))
def save(self, model_path):
torch.save(self.state_dict(), model_path)
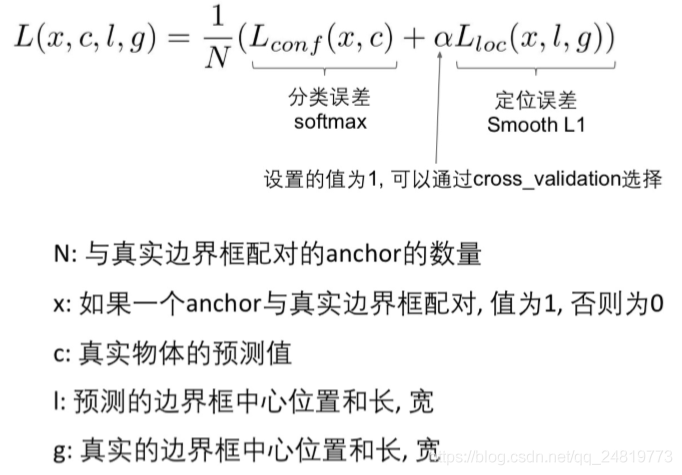
4损失函数
损失函数作者选择使用的依旧是SSD的Smooth L1 Loss以及Cross Entropy Loss,其中Smooth L1 Loss用于边界框的回归,而Cross Entropy Loss则用于分类。
具体pytorch实现如下:
class MultiboxLoss(nn.Module):
def __init__(self, priors, neg_pos_ratio,
center_variance, size_variance, device):
"""Implement SSD Multibox Loss.
Basically, Multibox loss combines classification loss
and Smooth L1 regression loss.
"""
super(MultiboxLoss, self).__init__()
self.neg_pos_ratio = neg_pos_ratio
self.center_variance = center_variance
self.size_variance = size_variance
self.priors = priors
self.priors.to(device)
def forward(self, confidence, predicted_locations, labels, gt_locations):
"""Compute classification loss and smooth l1 loss.
Args:
confidence (batch_size, num_priors, num_classes): class predictions.
locations (batch_size, num_priors, 4): predicted locations.
labels (batch_size, num_priors): real labels of all the priors.
boxes (batch_size, num_priors, 4): real boxes corresponding all the priors.
"""
num_classes = confidence.size(2)
with torch.no_grad():
# derived from cross_entropy=sum(log(p))
loss = -F.log_softmax(confidence, dim=2)[:, :, 0]
mask = box_utils.hard_negative_mining(loss, labels, self.neg_pos_ratio)
confidence = confidence[mask, :]
# 分类损失函数
classification_loss = F.cross_entropy(confidence.reshape(-1, num_classes), labels[mask], reduction='sum')
pos_mask = labels > 0
predicted_locations = predicted_locations[pos_mask, :].reshape(-1, 4)
gt_locations = gt_locations[pos_mask, :].reshape(-1, 4)
# 边界框回归损失函数
smooth_l1_loss = F.smooth_l1_loss(predicted_locations, gt_locations, reduction='sum') # smooth_l1_loss
# smooth_l1_loss = F.mse_loss(predicted_locations, gt_locations, reduction='sum') #l2 loss
num_pos = gt_locations.size(0)
return smooth_l1_loss / num_pos, classification_loss / num_pos
5结果预测
输入为:

输出为:

输入为:

输出为:
6模型转换
由于部署使用的是Tengine边缘推理框架,由于pytorch输出的模型无法直接转换到tmfile模型下,因此还是选择使用onnx中间件的形式进行过度,具体实现代码如下:
model_path = "models/pretrained/version-RFB-320.pth"
net = create_Mb_Tiny_RFB_fd(len(class_names), is_test=True)
net.load(model_path)
net.eval()
net.to("cuda")
model_name = model_path.split("/")[-1].split(".")[0]
model_path = f"models/onnx/{model_name}.onnx"
dummy_input = torch.randn(1, 3, 240, 320).to("cuda")
# dummy_input = torch.randn(1, 3, 480, 640).to("cuda") #if input size is 640*480
torch.onnx.export(net, dummy_input, model_path, verbose=False, input_names=['input'], output_names=['scores', 'boxes'])
得到onnx模型后便可以进行Tengine模型的转换和部署,该部分将在下一篇文章继续讨论。
7参考
[1].https://github.com/Linzaer/Ultra-Light-Fast-Generic-Face-Detector-1MB
[2].https://github.com/onnx/onnx
8推荐阅读

Google新作 | 详细解读 Transformer那些有趣的特性(建议全文背诵)

极品Trick | 在ResNet与Transformer均适用的Skip Connection解读

Transformer又一城 | Swin-Unet:首个纯Transformer的医学图像分割模型解读
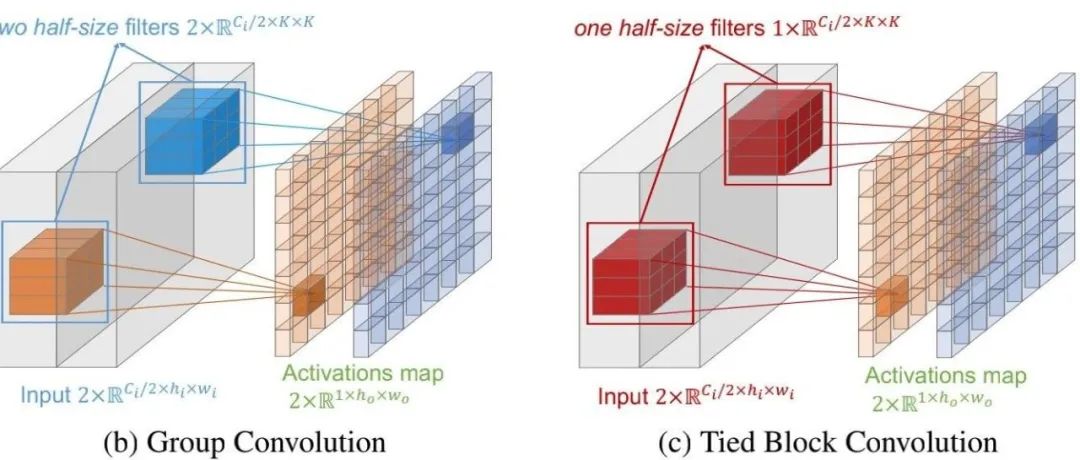
轻量化卷积:TBC,不仅仅是参数共享组卷积,更具备跨通道建模
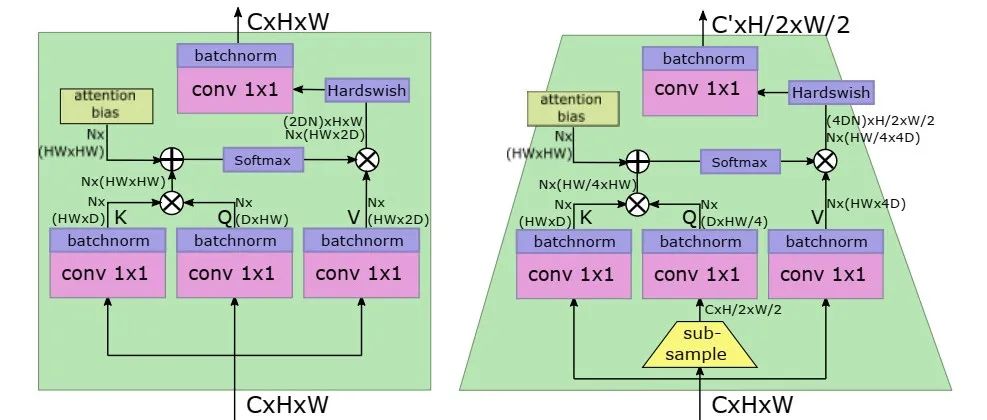
最快ViT | FaceBook提出LeViT,0.077ms的单图处理速度却拥有ResNet50的精度(文末附论文与源码)
本文论文原文获取方式,扫描下方二维码
回复【UltraFace】即可获取项目代码
长按扫描下方二维码添加小助手。
可以一起讨论遇到的问题
声明:转载请说明出处
扫描下方二维码关注【集智书童】公众号,获取更多实践项目源码和论文解读,非常期待你我的相遇,让我们以梦为马,砥砺前行!
