
机器人标定技术研究现状
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
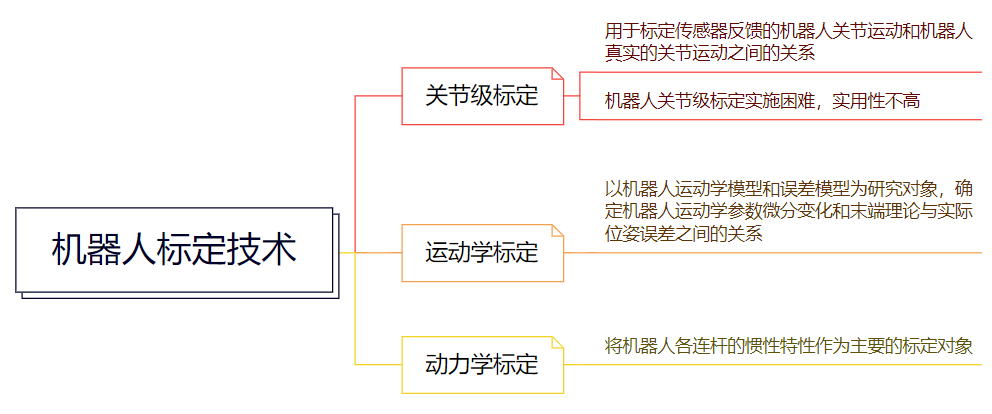
机器人标定技术是提高机器人末端绝对定位精度的重要方法。可分为三个层次:一是关节级标定,二是机器人运动学标定,三是机器人动力学标定。
1
运动学标定
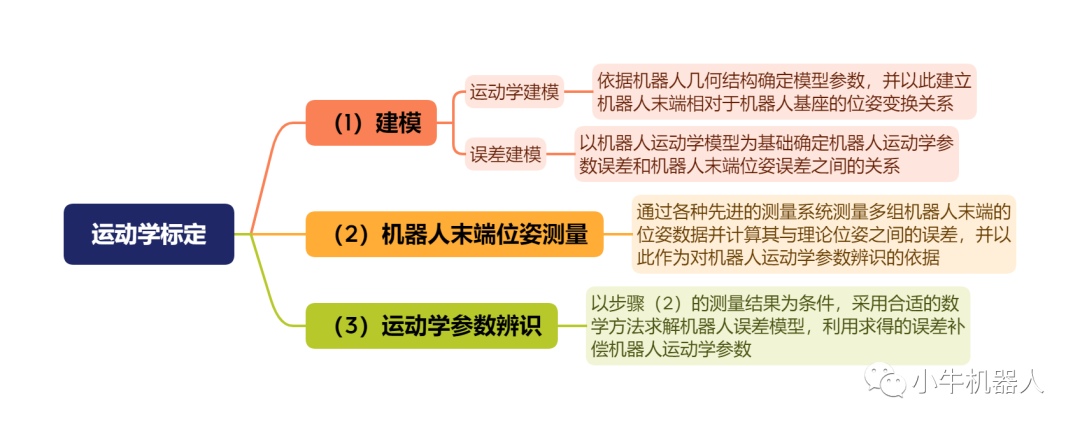
机器人运动学标定技术是 以机器人运动学模型为基础,通过测量机器人末端在运动过程中的真实位姿的数据,并和理论计算的末端位姿数据进行对比、分析,从而辨识出机器人的运动参数 。因此,机器人运动学标定技术包括以下三个步骤的内容:
1
步骤1:建模
作为机器人运动学标定技术的基础,机器人 运动学模型描述了末端到基座的变换关系,因此不同的模型对标定结果的精确度有着重要的影响 。 一般而言模型中用于描述机器人运动的参数越多,则该模型的精度就越高,但标定的难度和复杂度也随之增加。 机器人末端误差建模是机器人运动学标定技术的关键其描述了机器人末端理论和真实位姿误差与运动学参数微分变化之间的关系类似运动学模型,误差模型的选取也是在精度和复杂度之间权衡。 因此,应该根据实际的应用情况,适时地选用最合理的建模方式。
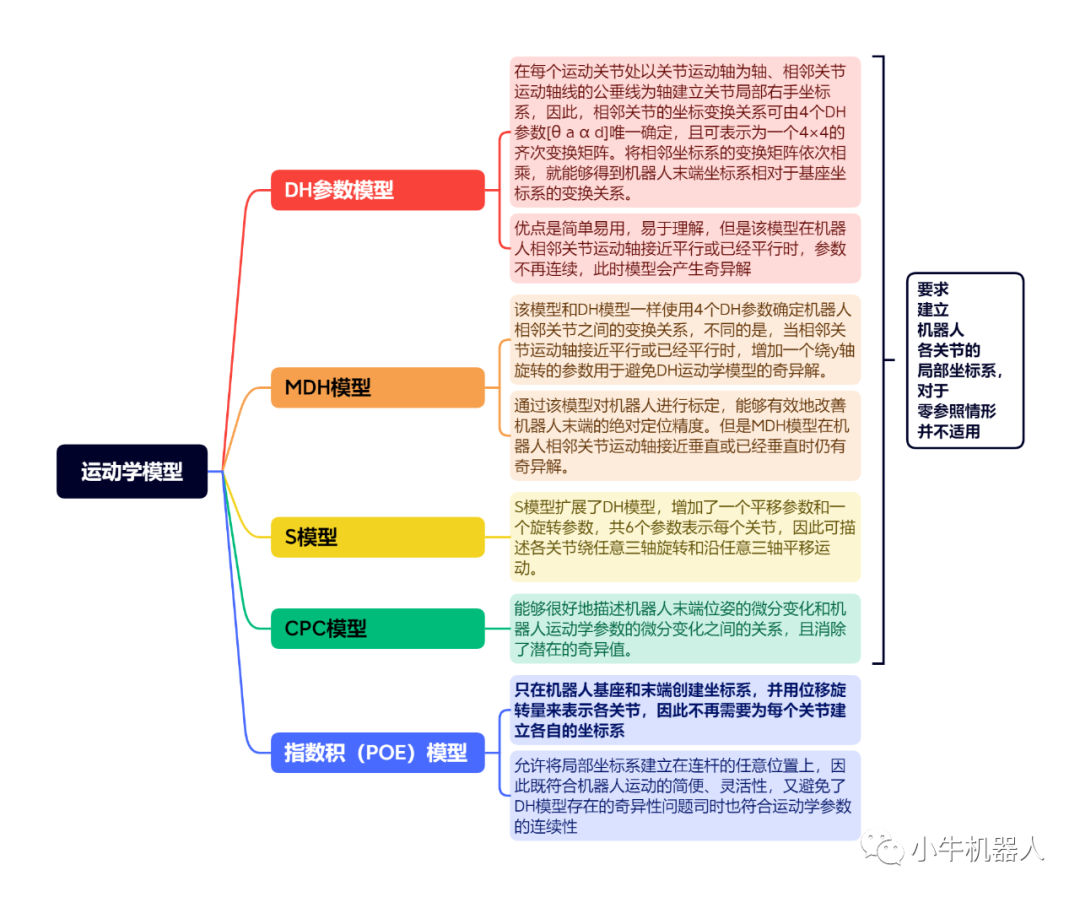
一般而言,机器人末端误差模型的选取和机器人运动学模型密切相关,许多学者基于不同的运动学模型提出了自己的误差模型。
2
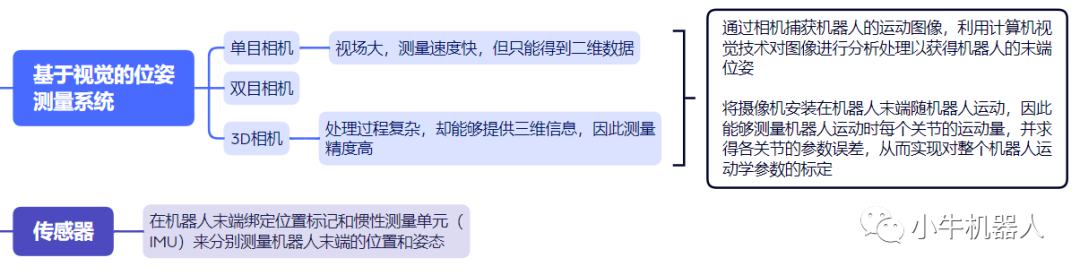
步骤2:末端位姿测量
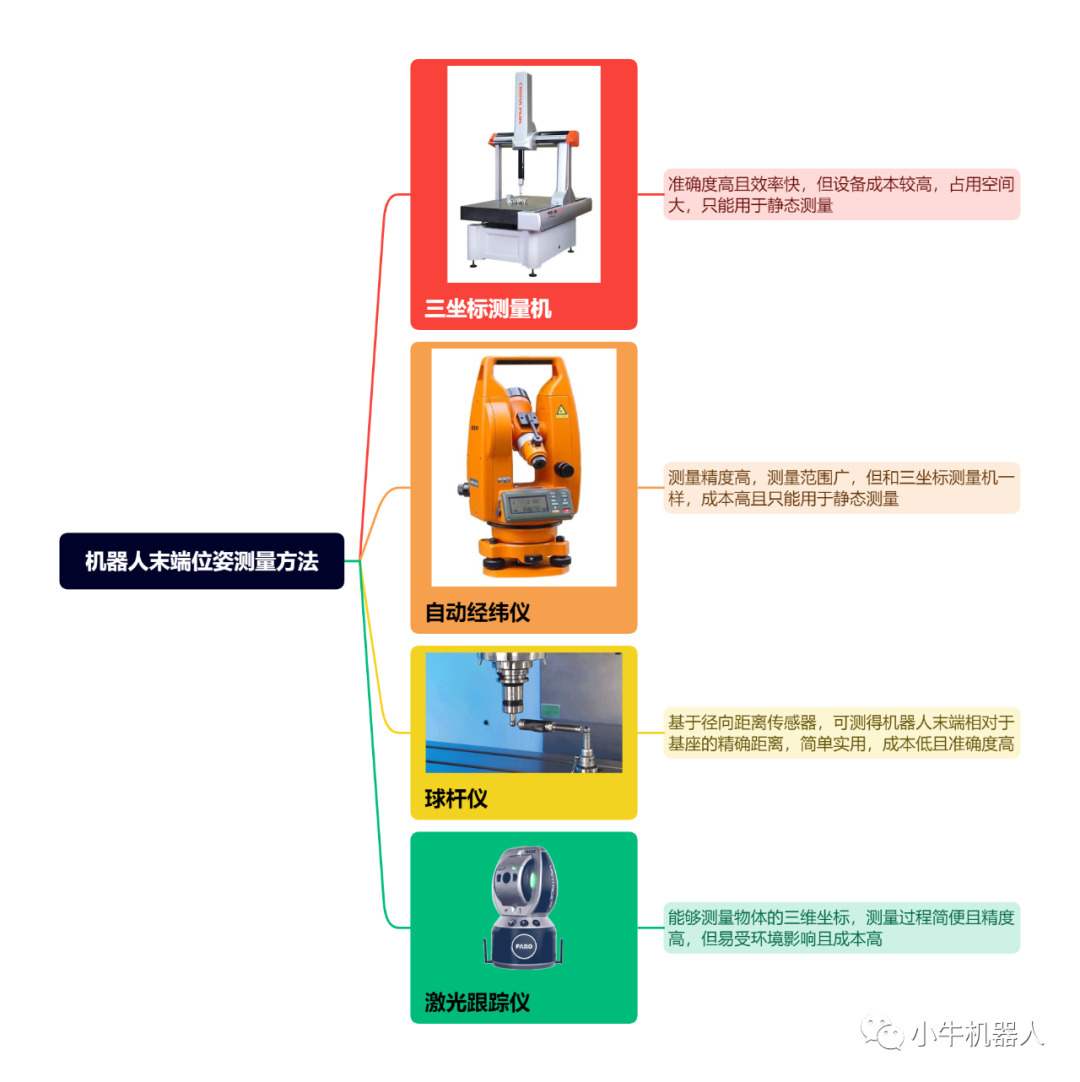 随着计算机视觉技术和传感器技术的发展,越来越多新型的测量技术被相继提出,如基于视觉或传感器的位姿测量系统。
随着计算机视觉技术和传感器技术的发展,越来越多新型的测量技术被相继提出,如基于视觉或传感器的位姿测量系统。
3
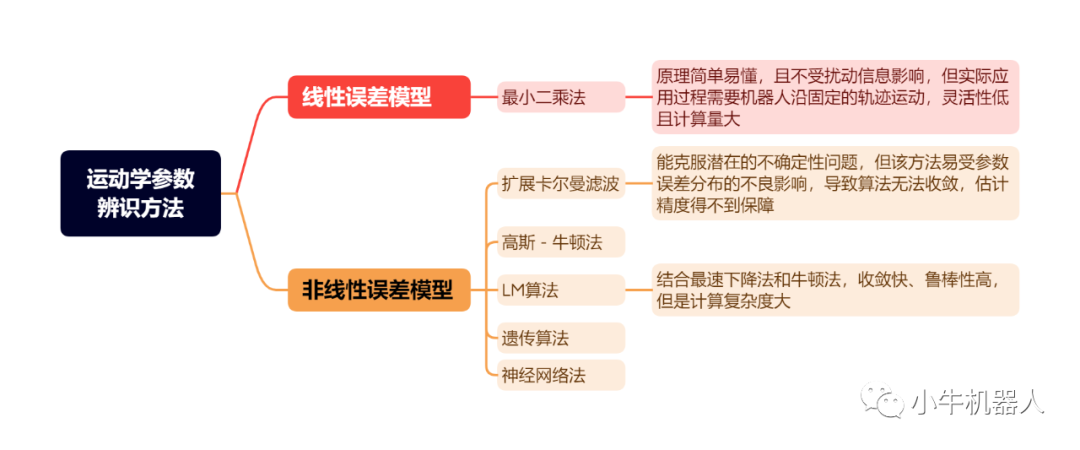
步骤3:运动学参数辨识
机器人末端误差模型提供了机器人运动学参数误差和机器人末端位姿误差之间的关系,机器人末端位姿测量技术测量出了机器人末端的位姿误差,运动学参数辨识使用一定的数学方法对误差模型进行处理,求解出运动学参数误差。
在实际应用中,机器人末端位姿误差模型通常是非线性的,但一般都将其以线性的方式进行处理,因而会产生不必要的误差。 大多数的运动学参数辨识方法选择舍弃高阶误差项,并在求解误差模型时反复迭代以减小不必要的误差,因此能够获得较高的 辨识 精度。
2
动力学标定
机器人在运动过程中,随着速度的提高,所承受的离心力、重力以及力矩和哥氏力等对机器人的性能有着不同的影响。在已知机器人运动的微分方程的情况下,一般没有办法直接获得机器人的动力学参数,而只能通过机器人动力学参数标定技术来获得。类似机器人运动学参数标定,机器人动力学参数标定过程也可分为三个步骤:建模、机器人动态精度测量和机器人动力学参数 辨识 。
1
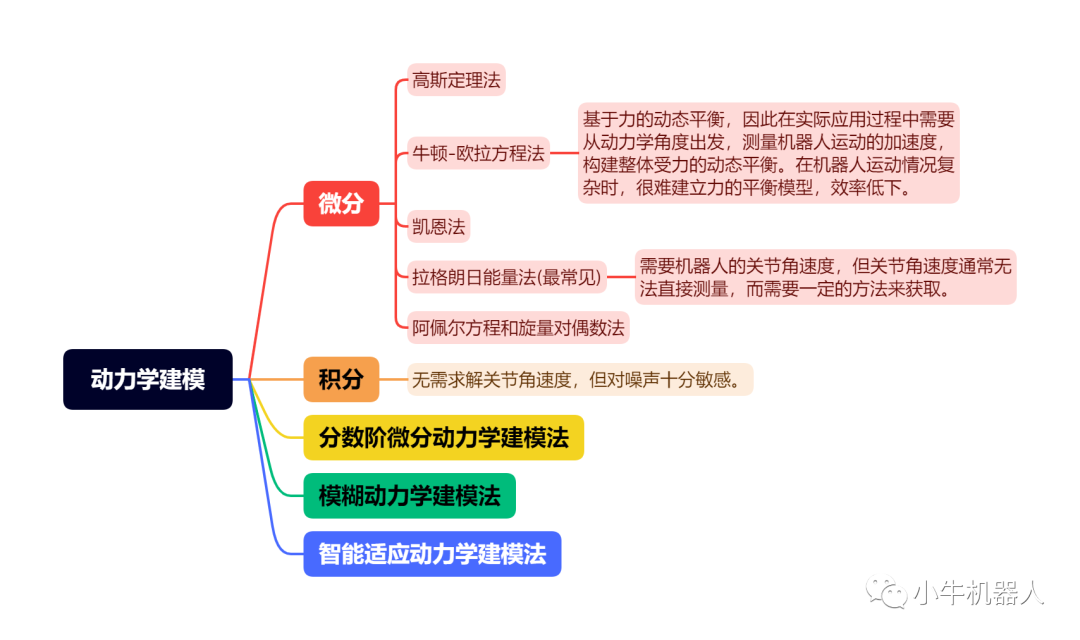
步骤1: 建模
2
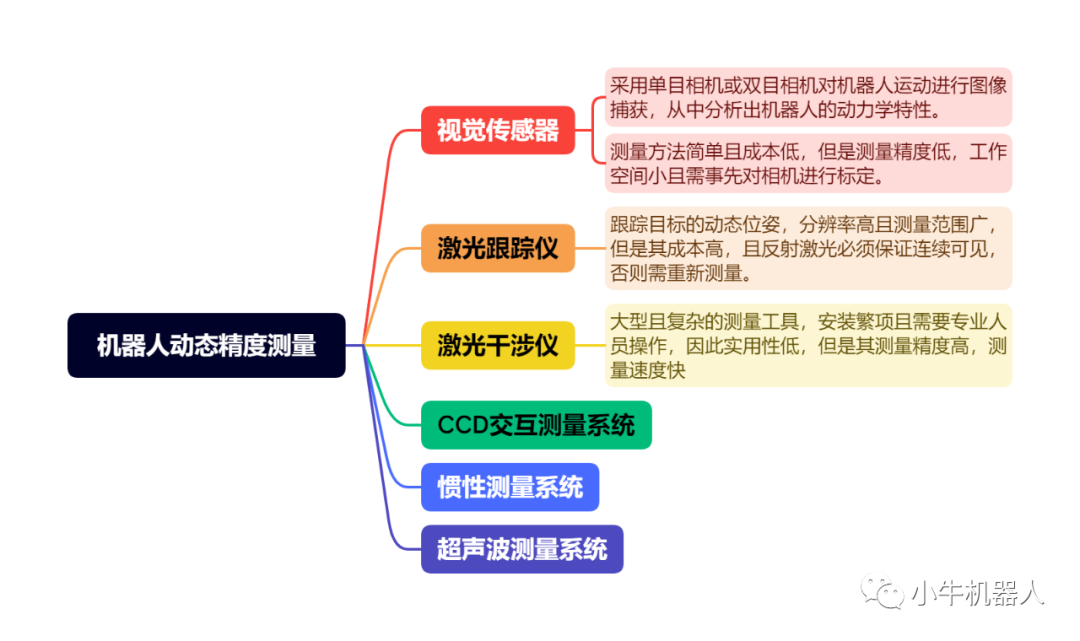
步骤2: 机器人动态精度测量
3
步骤3 : 机器人动力学参数辩识
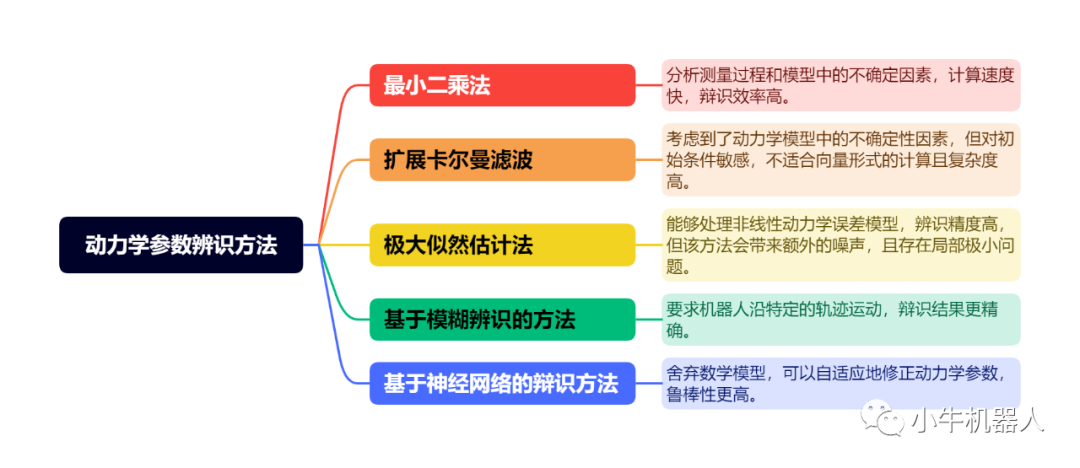
3
离线辨识
机器人运动学离线参数 辨识 是指在机器人处于离线的状态下事先对机器人的运动学参数进行标定。过去的机器人标定技术大多通过离线编程技术实现,即 操作员控制机器人运动到固定的位姿,并通过控制系统获取当前的末端位姿和各关节的关节角,然后采用合适的位姿测量系统测量此时的机器人末端真实位姿,从而获得末端理论位姿和实际位姿的误差,不断重复以上过程以获取足够多的数据,最后利用一定的数学方法辨识机器人的运动学参数误差并对其进行补偿 。
由此可见,以往的机器人标定过程通常需要机器人处于离线状态,且需要大量的人工辅助,复杂且低效。 当机器人处于人类难以抵达的动态非结构化的环境(如高温、高压等)中时,离线的机器人参数辨识方法难以实施,同时由于环境因素使得机器人几何结构不断变化,离线标定也变得毫无意义 。传统的机器人标定技术所用的测量工具如自动经纬仪、三坐标测量机、激光跟踪仪、球杆仪等通常体积庞大,价格昂贵,操作复杂且需要专业的操作人员,因此很难用于机器人的在线标定!
4
在线辨识
机器人运动学在线参数 辨识 是指 在机器人工作的同时,机器人自主进行自动标定以实时提高机器人的运动精度 。相比于离线辨识,在线辨识方法简单,不需要安装复杂的设备,且能够自适应各种环境,具有高效、高精度和高鲁棒性的优点。当机器人处于如高压的深海或高温的外太空中工作时,机器人的几何形态极易发生变化,导致机器人的运动精度低下,而离线的参数 辨识 方法无法辨识参数。因此,需要在机器人运动的同时实时测量机器人末端的位姿数据并 辨识 机器人的参数误差,弥补环境因素对机器人几何结构的不利影响,提高机器人末端的绝对定位精度。由此可见,机器人在线标定技术基本不需要借助人工力量,过程简单高效,尤其是在动态非结构化的环境下,对提高机器人末瑞的绝对定位精度有着非常重大的意义。
Ref:
[1]杜广龙,张平.机器人运动学在线标定技术[M].广州:华南理工大学出版社,2016.
转自:小牛机器人
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
—THE END—