
运动状态估计之卡尔曼滤波详解
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
作者丨佳浩(SLAM算法工程师)@知乎 来源丨https://zhuanlan.zhihu.com/p/395738793 编辑丨阿木实验室 今天将主要记录一下自己对机器人运动状态估计的学习,粒子滤波与卡尔曼滤波的讲述顺序稍做调整,主要是考虑到学习理解的难度,应该循序渐进。
那么主要讲述纲要如下:
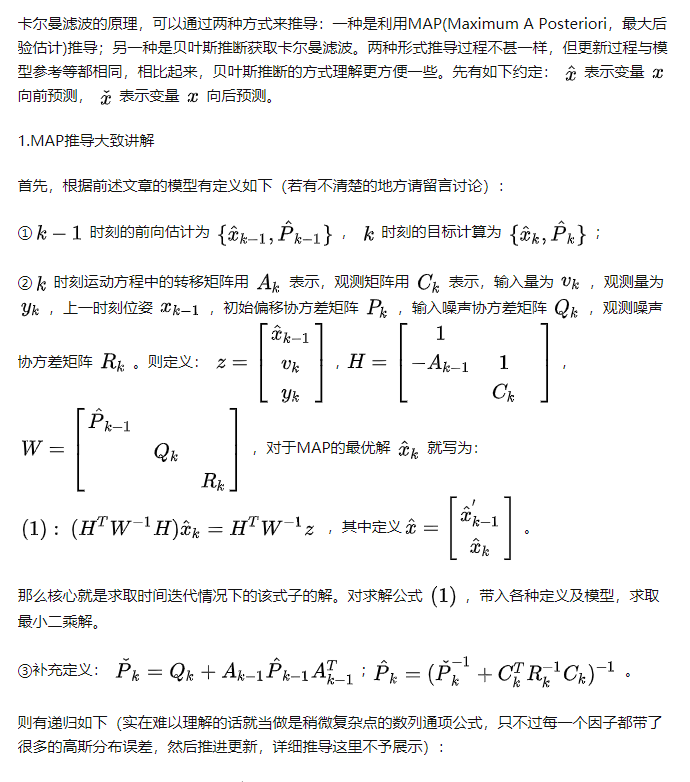
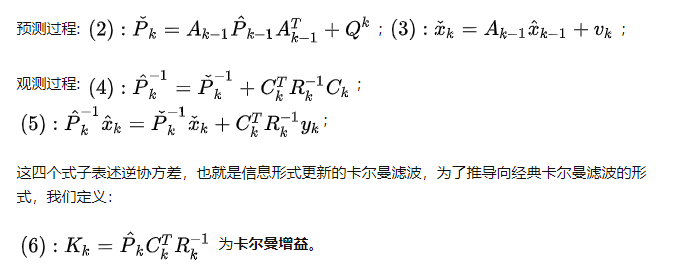
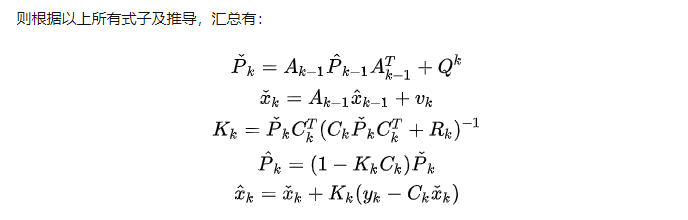
1、卡尔曼滤波(kalman Filter,KF)原理与公式
2、经典卡尔曼滤波应用与简易代码实现
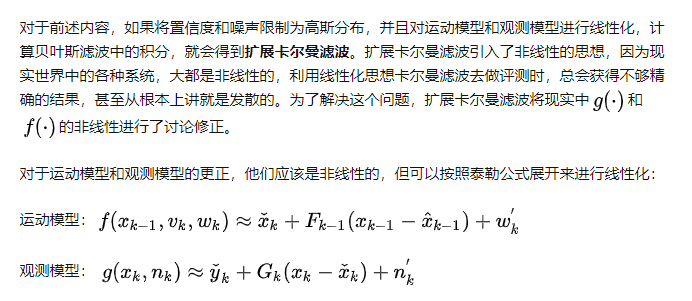
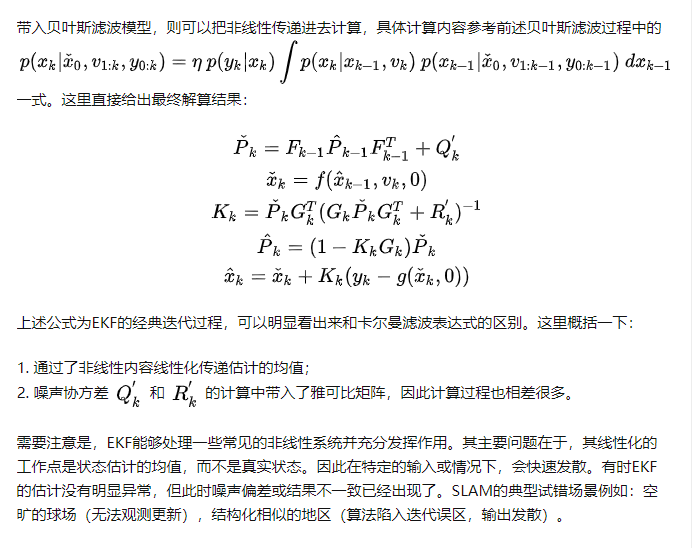
3、扩展卡尔曼滤波(Extended kalman Filter EKF)原理
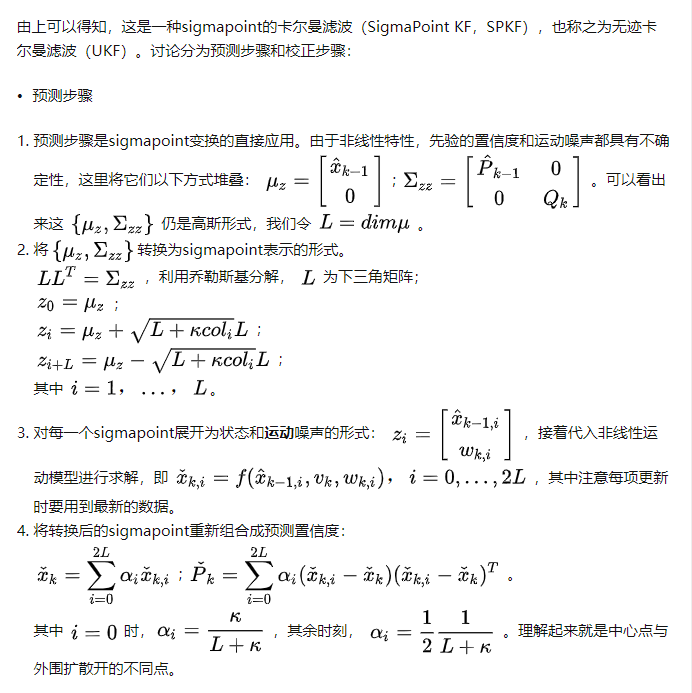
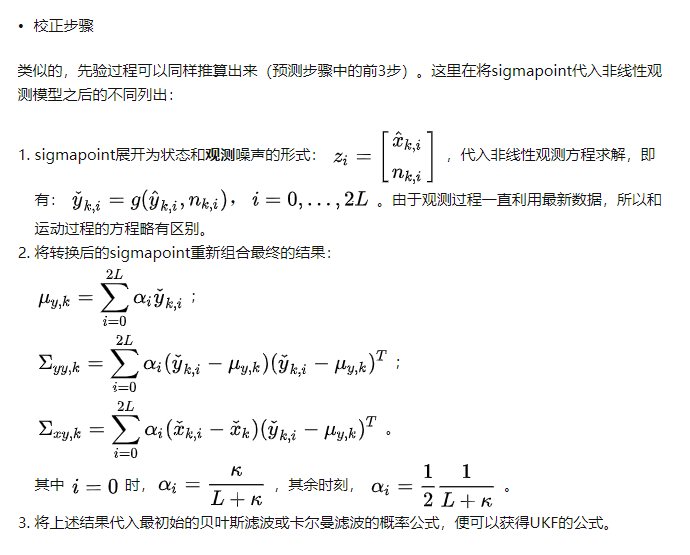
4、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)原理
至于粒子滤波与蒙特卡罗定位方法,因为和无迹卡尔曼滤波的部分思想有重叠,但又算是另外一种方法。
1、卡尔曼滤波原理与公式

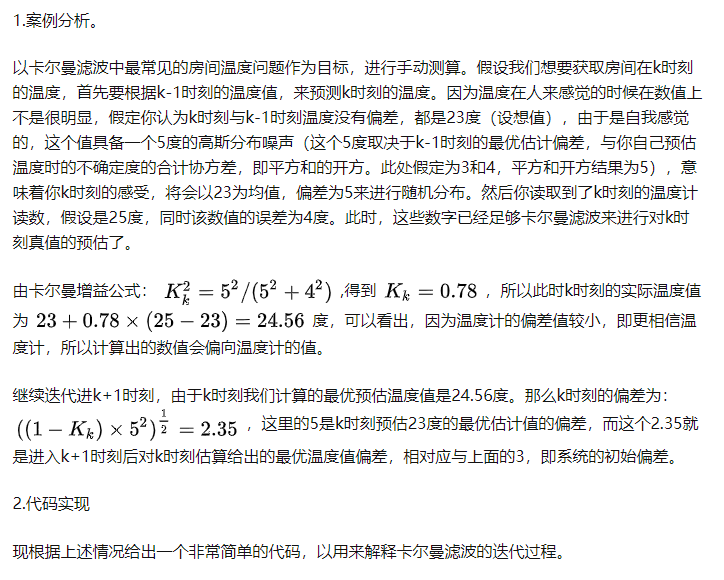
2、卡尔曼滤波的案例分析与简易代码实现
int main(){ //predict para double ori_gauss = 3; double pre_gauss = 4;//inherent deviation double step_gauss; double pre_data; //observation para double ob_gauss = 4;//inherent deviation double ob_data; //kalman filter para double gain_K; //pre & ob process data in pre_data = 23; ob_data = 25; //kalman filter process step_gauss = pow((pow(ori_gauss,2)+pow(pre_gauss,2)),0.5); gain_K = pow(pow(step_gauss,2)/(pow(step_gauss,2)+pow(ob_gauss,2)),0.5); pre_data = pre_data + gain_K*(ob_data - pre_data); ori_gauss = pow((1 - gain_K) * pow(step_gauss,2),0.5); //data output std::cout << "Kalman gain is : " << gain_K <<std::endl; std::cout << "prediction is : " << pre_data <<std::endl; std::cout << "new gauss deviation is : " << ori_gauss <<std::endl; //data renew pre_data = pre_data;//if have new pre then replace, or use old one but easier diffuse ob_data = ob_data;//new ob replace return 0;}
随手写了一个,验证过单帧推进,具体迭代和需求根据大家使用来Ctrl+C,Ctrl+V,很好理解,不多赘述。
如果应用于多维场景,例如机器人的姿态分析等,涉及到了更多的C++应用,经常使用诸如Eigen,Vector等库,具体应用后续跟进SLAM分析。
3、扩展卡尔曼滤波(Extended kalman Filter EKF)

4、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)

UKF总结
UKF的优点,在于①它本身不具备解析形式的导数和复杂的方程;②它的解算使用基本的线性代数,我们甚至不需要任何关于运动或观测模型的闭环形式,可以理解为黑盒运算。
其与EKF的泰勒一阶展开计算雅克比式计算不同,UKF计算到收敛的代价取决于sigmapoint的选取与初状态的情况。
以上便是关于KF,EKF,UKF的理论详解与部分几何化理解,并给出了KF的一个应用参考代码,当系统复杂时,引入更多的约束来参加运算,效果会更好,相关代码可以依据不同需求尝试编写解决。
学无止境,精益求精,在算法工程师的路上越走越远,越挖越深。
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
今天将主要记录一下自己对机器人运动状态估计的学习,粒子滤波与卡尔曼滤波的讲述顺序稍做调整,主要是考虑到学习理解的难度,应该循序渐进。
那么主要讲述纲要如下:
1、卡尔曼滤波(kalman Filter,KF)原理与公式
2、经典卡尔曼滤波应用与简易代码实现
3、扩展卡尔曼滤波(Extended kalman Filter EKF)原理
4、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)原理
至于粒子滤波与蒙特卡罗定位方法,因为和无迹卡尔曼滤波的部分思想有重叠,但又算是另外一种方法。
1、卡尔曼滤波原理与公式
2、卡尔曼滤波的案例分析与简易代码实现
int main(){//predict paradouble ori_gauss = 3;double pre_gauss = 4;//inherent deviationdouble step_gauss;double pre_data;//observation paradouble ob_gauss = 4;//inherent deviationdouble ob_data;//kalman filter paradouble gain_K;//pre & ob process data inpre_data = 23;ob_data = 25;//kalman filter processstep_gauss = pow((pow(ori_gauss,2)+pow(pre_gauss,2)),0.5);gain_K = pow(pow(step_gauss,2)/(pow(step_gauss,2)+pow(ob_gauss,2)),0.5);pre_data = pre_data + gain_K*(ob_data - pre_data);ori_gauss = pow((1 - gain_K) * pow(step_gauss,2),0.5);//data outputstd::cout << "Kalman gain is : " << gain_K <<std::endl;std::cout << "prediction is : " << pre_data <<std::endl;std::cout << "new gauss deviation is : " << ori_gauss <<std::endl;//data renewpre_data = pre_data;//if have new pre then replace, or use old one but easier diffuseob_data = ob_data;//new ob replacereturn 0;}
随手写了一个,验证过单帧推进,具体迭代和需求根据大家使用来Ctrl+C,Ctrl+V,很好理解,不多赘述。
如果应用于多维场景,例如机器人的姿态分析等,涉及到了更多的C++应用,经常使用诸如Eigen,Vector等库,具体应用后续跟进SLAM分析。
3、扩展卡尔曼滤波(Extended kalman Filter EKF)
4、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)
UKF总结
UKF的优点,在于①它本身不具备解析形式的导数和复杂的方程;②它的解算使用基本的线性代数,我们甚至不需要任何关于运动或观测模型的闭环形式,可以理解为黑盒运算。
其与EKF的泰勒一阶展开计算雅克比式计算不同,UKF计算到收敛的代价取决于sigmapoint的选取与初状态的情况。
以上便是关于KF,EKF,UKF的理论详解与部分几何化理解,并给出了KF的一个应用参考代码,当系统复杂时,引入更多的约束来参加运算,效果会更好,相关代码可以依据不同需求尝试编写解决。
学无止境,精益求精,在算法工程师的路上越走越远,越挖越深。
本文仅做学术分享,如有侵权,请联系删文。