计算机基础与手撕代码篇!准算法工程师总结出的超强面经(含答案)
↑ 点击蓝字 关注极市平台
作者丨灯会
来源丨极市平台
编辑丨极市平台
极市导读
作者灯会为21届中部985研究生,七月份将入职某互联网大厂cv算法工程师。在去年灰飞烟灭的算法求职季中,经过几十场不同公司以及不同部门的面试中积累出了CV总复习系列,此为计算机基础与手撕代码篇。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
系列文章:
操作系统
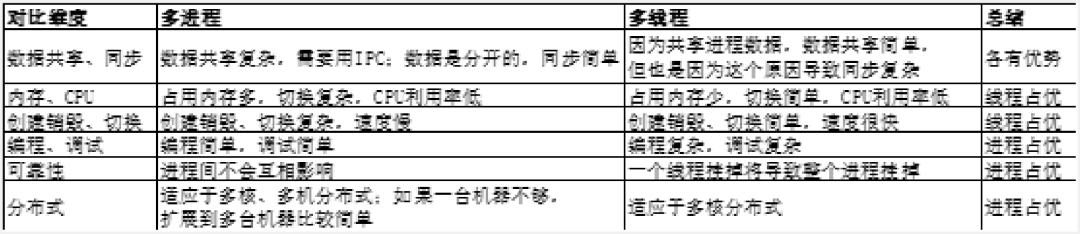
1.线程和进程的区别?
进程: 是执行中一段程序,即一旦程序被载入到内存中并准备执行,它就是一个进程。进程是表示资源分配的基本概念,又是调度运行的基本单位,是系统中的并发执行的单位。
进程是程序的一次执行过程,是一个动态概念,是程序在执行过程中分配和管理资源的基本单位,每一个进程都有一个自己的地址空间,至少有 5 种基本状态,它们是:初始态,执行态,等待状态,就绪状态,终止状态。
线程:单个进程中执行中每个任务就是一个线程。线程是进程中执行运算的最小单位。
线程是CPU调度和分派的基本单位,它可与同属一个进程的其他的线程共享进程所拥有的全部资源。
一个线程只能属于一个进程,但是一个进程可以拥有多个线程。多线程处理就是允许一个进程中在同一时刻执行多个任务。
相同点:进程和线程都有ID/寄存器组、状态和优先权、信息块,创建后都可更改自己的属性,都可与父进程共享资源、都不能直接访问其他无关进程或线程的资源。
联系:线程是进程的一部分,一个线程只能属于一个进程,而一个进程可以有多个线程,但至少有一个线程。
区别: 1.一个程序至少有一个进程,一个进程至少有一个线程2. 线程的划分尺度小于进程,使得多线程程序的并发性高3. 另外,进程在执行过程中拥有独立的内存单元,而多个线程共享内存,从而极大地提高了程序的运行效率4. 线程在执行过程中与进程还是有区别的。每个独立的线程有一个程序运行的入口、顺序执行序列和程序的出口。但是线程不能够独立执行,必须依存在应用程序中,由应用程序提供多个线程执行控制 5. 从逻辑角度来看,多线程的意义在于一个应用程序中,有多个执行部分可以同时执行。但操作系统并没有将多个线程看做多个独立的应用,来实现进程的调度和管理以及资源分配。这就是进程和线程的重要区别。
什么时候用线程什么时候进程
进程与线程的选择取决以下几点:①需要频繁创建销毁的优先使用线程;因为对进程来说创建和销毁一个进程代价是很大的。②线程的切换速度快,所以在需要大量计算,切换频繁时用线程,还有耗时的操作使用线程可提高应用程序的响应。③因为对CPU系统的效率使用上线程更占优,所以可能要发展到多机分布的用进程,多核分布用线程。④并行操作时使用线程,如C/S架构的服务器端并发线程响应用户的请求。⑤需要更稳定安全时,适合选择进程;需要速度时,选择线程更好。
2.线程有哪些状态
5种基本状态,它们是:初始态,执行态,等待状态,就绪状态,终止状态。
3.那进程间通信的方式?线程可以通信吗?
进程间通信(IPC,InterProcess Communication)是指在不同进程之间传播或交换信息。IPC的方式通常有管道(包括无名管道和命名管道)、消息队列、信号量、共享存储、Socket、Streams等。其中 Socket和Streams支持不同主机上的两个进程IPC。
线程通信常用的方式有:wait/notify 等待、Volatile 内存共享、CountDownLatch 并发工具、CyclicBarrier 并发工具
4.多线程多进程
5.阻塞与非阻塞
同步:所谓同步,就是在发出一个功能调用时,在没有得到结果之前,该调用就不返回。也就是必须一件一件事做,等前一件做完了才能做下一件事。
例如普通B/S模式(同步):提交请求->等待服务器处理->处理完毕返回 这个期间客户端浏览器不能干任何事
异步:异步的概念和同步相对。当一个异步过程调用发出后,调用者不能立刻得到结果。实际处理这个调用的部件在完成后,通过状态、通知和回调来通知调用者。
例如 ajax请求(异步): 请求通过事件触发->服务器处理(这是浏览器仍然可以作其他事情)->处理完毕
阻塞:阻塞调用是指调用结果返回之前,当前线程会被挂起(线程进入非可执行状态,在这个状态下,cpu不会给线程分配时间片,即线程暂停运行)。函数只有在得到结果之后才会返回。
有人也许会把阻塞调用和同步调用等同起来,实际上他是不同的。对于同步调用来说,很多时候当前线程还是激活的,只是从逻辑上当前函数没有返回,它还会抢占cpu去执行其他逻辑,也会主动检测io是否准备好。
非阻塞:非阻塞和阻塞的概念相对应,指在不能立刻得到结果之前,该函数不会阻塞当前线程,而会立刻返回。
再简单点理解就是:
同步,就是我调用一个功能,该功能没有结束前,我死等结果。
异步,就是我调用一个功能,不需要知道该功能结果,该功能有结果后通知我(回调通知)
阻塞,就是调用我(函数),我(函数)没有接收完数据或者没有得到结果之前,我不会返回。
非阻塞,就是调用我(函数),我(函数)立即返回,通过select通知调用者
6. 五种IO模型
1)阻塞I/O(blocking I/O)
2)非阻塞I/O (nonblocking I/O)
I/O复用(select 和poll) (I/O multiplexing)
4)信号驱动I/O (signal driven I/O (SIGIO))
5)异步I/O (asynchronous I/O (the POSIX aio_functions))
LINUX
1.Linux的一些常用命令
①重启reboot
②关机poweroff、shutdown -h now
③查看本机ip信息的名称ifconfig
④vi和vim编辑器
一般模式,插入模式,底行模式
一般模式(通过按iaoIAO键)-->插入模式 插入模式(按Esc键)--> 一般模式
一般模式(通过按:键)-->底行模式 底行模式(按Esc键)--> 一般模式
底行模式中,wq = write quit 写入并退出
wq! 如果有不能保存退出的情况可以使用wq! ! 强制退出
q! = quit !强制 不写入强制退出
⑤ 查看目录下的内容
ls = list
语法:
ls [目录名称]
实例:
ls 查看当前目录下的所有内容
ls /etc 查看etc目录下的所有内容(绝对路径)
目录下的所有文件
ls spring/ 当前目录下存在spring可以使用相对路径查看
ls spring/springmvc
-a 查看目录下所有的文件,包括隐藏文件
-l 以长格式显示目录下的所有文件(显示文件或者目录的详细信息)
ls -l 可以简化为 ll
-t 按更新时间倒叙排序显示目录下的内容
ls -a /etc
ls -l /etc
ls -l -t /etc 等同于 ls -lt /etc
⑥切换目录 cd = change directory
⑦删除文件 rm =remove
2. Linux中grep命令详解
Linux系统中grep命令是一种强大的文本搜索工具,它能使用正则表达式搜索文本,并把匹 配的行打印出来。grep全称是Global Regular Expression Print,表示全局正则表达式版本,它的使用权限是所有用户。
grep [options]
主要参数:grep --help可查看
-c:只输出匹配行的计数。
-i:不区分大小写。
-h:查询多文件时不显示文件名。
-l:查询多文件时只输出包含匹配字符的文件名。
-n:显示匹配行及 行号。
-s:不显示不存在或无匹配文本的错误信息。
-v:显示不包含匹配文本的所有行。
--color=auto :可以将找到的关键词部分加上颜色的显示。
3.按时间顺序打印出文件列表,按文件大小打印文件列表
ls
按大小排序:[root@localhost ~]# ls -Sh
#按时间排序:[root@localhost ~]# ls -rt
4.Linux如何查看某进程关联的相关文件有哪些?
lsof命令是什么?可以列出被进程所打开的文件的信息。
5.Linux启动的过程
Linux系统的启动过程并不是大家想象中的那么复杂,其过程可以分为5个阶段:
内核的引导。运行 init。系统初始化。建立终端 。用户登录系统。linux如何查看进程
6.linux查看线程用哪个命令
1.使用top命令,具体用法是 top –H 加上这个选项,top的每一行就不是显示一个进程,而是一个线程。
2.使用ps命令,具体用法是 ps –xH
这样可以查看所有存在的线程,也可以使用grep作进一步的过滤。
3.使用ps命令,具体用法是 ps -mq PID 这样可以看到指定的进程产生的线程数目。
手撕代码篇
1.计算卷积网络输出尺寸
卷积神经网络的计算公式为:N=(W-F+2P)/S+1 其中N:输出大小
W:输入大小 F:卷积核大小 P:填充值的大小 S:步长大小
2. NMS
import numpy as npdef py_cpu_nms(dets, thresh):"""Pure Python NMS baseline."""x1 = dets[:, 0]y1 = dets[:, 1]x2 = dets[:, 2]y2 = dets[:, 3]scores = dets[:, 4]areas = (x2 - x1 + 1) * (y2 - y1 + 1)order = scores.argsort()[::-1] #[::-1]表示降序排序,输出为其对应序号keep = [] #需要保留的bounding boxwhile order.size > 0:i = order[0] #取置信度最大的(即第一个)框keep.append(i) #将其作为保留的框#以下计算置信度最大的框(order[0])与其它所有的框(order[1:],即第二到最后一个)框的IOU,以下都是以向量形式表示和计算xx1 = np.maximum(x1[i], x1[order[1:]]) #计算xmin的max,即overlap的xminyy1 = np.maximum(y1[i], y1[order[1:]]) #计算ymin的max,即overlap的yminxx2 = np.minimum(x2[i], x2[order[1:]]) #计算xmax的min,即overlap的xmaxyy2 = np.minimum(y2[i], y2[order[1:]]) #计算ymax的min,即overlap的ymaxw = np.maximum(0.0, xx2 - xx1 + 1) #计算overlap的widthh = np.maximum(0.0, yy2 - yy1 + 1) #计算overlap的hightinter = w * h #计算overlap的面积ovr = inter / (areas[i] + areas[order[1:]] - inter) #计算并,-inter是因为交集部分加了两次。inds = np.where(ovr <= thresh)[0]#本轮,order仅保留IOU不大于阈值的下标order = order[inds + 1] #删除IOU大于阈值的框return keep
3.手写计算IOU代码
def IOU(x1,y1,X1,Y1, x2,y2,X2,Y2):xx = max(x1,x2)XX = min(X1,X2)yy = max(y1,y2)YY = min(Y1,Y2)m = max(0., XX-xx)n = max(0., YY-yy)Jiao = m*nBing = (X1-x1)*(Y1-y1)+(X2-x2)*(Y2-y2)-Jiaoreturn Jiao/Bingdef bb_intersection_over_union(boxA, boxB):boxA = [int(x) for x in boxA]boxB = [int(x) for x in boxB]xA = max(boxA[0], boxB[0])yA = max(boxA[1], boxB[1])xB = min(boxA[2], boxB[2])yB = min(boxA[3], boxB[3])interArea = max(0, xB - xA + 1) * max(0, yB - yA + 1)boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1)boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1)iou = interArea / float(boxAArea + boxBArea - interArea)return iou
4.手撕SoftNMS
import numpy as npdef soft_nms(dets, sigma=0.5, Nt=0.5, method=2, threshold=0.1):box_len = len(dets) # box的个数for i in range(box_len):tmpx1, tmpy1, tmpx2, tmpy2, ts = dets[i, 0], dets[i, 1], dets[i, 2], dets[i, 3], dets[i, 4]max_pos = imax_scores = ts# get max boxpos = i+1while pos < box_len:if max_scores < dets[pos, 4]:max_scores = dets[pos, 4]max_pos = pospos += 1# add max box as a detectiondets[i, :] = dets[max_pos, :]# swap ith box with position of max boxdets[max_pos, 0] = tmpx1dets[max_pos, 1] = tmpy1dets[max_pos, 2] = tmpx2dets[max_pos, 3] = tmpy2dets[max_pos, 4] = ts# 将置信度最高的 box 赋给临时变量tmpx1, tmpy1, tmpx2, tmpy2, ts = dets[i, 0], dets[i, 1], dets[i, 2], dets[i, 3], dets[i, 4]pos = i+1# NMS iterations, note that box_len changes if detection boxes fall below thresholdwhile pos < box_len:x1, y1, x2, y2 = dets[pos, 0], dets[pos, 1], dets[pos, 2], dets[pos, 3]area = (x2 - x1 + 1)*(y2 - y1 + 1)iw = (min(tmpx2, x2) - max(tmpx1, x1) + 1)ih = (min(tmpy2, y2) - max(tmpy1, y1) + 1)if iw > 0 and ih > 0:overlaps = iw * ihious = overlaps / ((tmpx2 - tmpx1 + 1) * (tmpy2 - tmpy1 + 1) + area - overlaps)if method == 1: # 线性if ious > Nt:weight = 1 - iouselse:weight = 1elif method == 2: # gaussianweight = np.exp(-(ious**2) / sigma)else: # original NMSif ious > Nt:weight = 0else:weight = 1# 赋予该box新的置信度dets[pos, 4] = weight * dets[pos, 4]# 如果box得分低于阈值thresh,则通过与最后一个框交换来丢弃该框if dets[pos, 4] < threshold:dets[pos, 0] = dets[box_len-1, 0]dets[pos, 1] = dets[box_len-1, 1]dets[pos, 2] = dets[box_len-1, 2]dets[pos, 3] = dets[box_len-1, 3]dets[pos, 4] = dets[box_len-1, 4]box_len = box_len-1pos = pos-1pos += 1keep = [i for i in range(box_len)]return keepif __name__ == '__main__':dets = [[0, 0, 100, 101, 0.9], [5, 6, 90, 110, 0.7], [17, 19, 80, 120, 0.8], [10, 8, 115, 105, 0.5]]dets = np.array(dets)result = soft_nms(dets, 0.5)print(result)
5.手写k-means
import pandas as pdimport numpy as npimport random as ranimport matplotlib.pyplot as pltfrom mpl_toolkits import mplot3d #from sklearn.cluster import KMeansdef model_test():data = open_file("C:\\Users\\happy\\Desktop\\Iris1.csv")dataset = np.delete(data,-1,axis=1) #去掉最后一列k_means = KMeans(n_clusters=3) #构建模型k_means.fit(dataset)km4_labels = k_means.labels_ax = plt.subplot(projection='3d')ax.scatter(dataset[:,0],dataset[:,1],dataset[:,2],\c=km4_labels.astype(np.float))ax.set_zlabel('Z') # 坐标轴ax.set_ylabel('Y')ax.set_xlabel('X')plt.show()
6.写python set的基本操作
集合常用的两个场景是:1.去重(如:列表去重);2.关系测试(如:取交集、取并集、取差集等)
7.写一个交叉熵损失函数
交叉熵损失函数:实际输出(概率)与期望输出(概率)的距离,也就是交叉熵的值越小,两个概率分布就越接近。
def cross_entropy(a,y):return np.sum(np.nan_to_num(-y*np.log(a)-(1-y)*np.log(1-a)))#tensorflow版loss = tf.reduce_mean(-tf.reduce_sum(y_*tf.log(y),reduction_indices=[1]))#numpy版loss = np.mean(-np.sum(y_*np.log(y),axis=1))
8. Softmax函数
Softmax 函数:将激活值与所有神经元的输出值联系在一起,所有神经元的激活值加起来为1。第L层(最后一层)的第j个神经元的激活输出为:
def softmax(x):shift_x = x - np.max(x)#防止输入增大时输出为nanexp_x = np.exp(shift_x)return exp_x / np.sum(exp_x)
9.手推BN公式
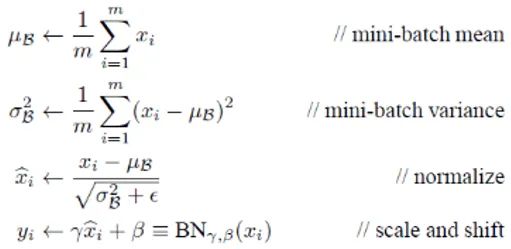
上面的公式中m指的是mini-batch size。
源码实现
m = K.mean(X, axis=-1, keepdims=True)#计算均值std = K.std(X, axis=-1, keepdims=True)#计算标准差X_normed = (X - m)/(std + self.epsilon)#归一化out = self.gamma * X_normed + self.beta#重构变换
10.Python打开一个文件,找出某个字符串最快的方法
python 字符串查找有4个方法,1 find, 2 index方法,3 rfind方法,4 rindex方法。
11.写一下混淆矩阵、精确率和召回率的公式
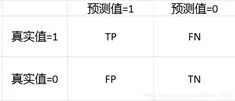
准确度(Accuracy) = (TP+TN) / (TP+TN+FN+TN)
精度(precision, 或者PPV, positive predictive value) = TP / (TP + FP)
召回(recall, 或者敏感度,sensitivity,真阳性率,TPR,True Positive Rate) = TP / (TP + FN)
F1-值(F1-score) = 2TP / (2TP+FP+FN)
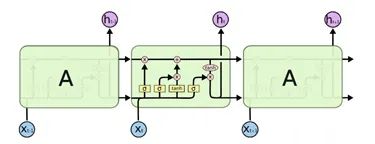
12.要求画出LSTM的结构图(写了cell state,hidden state,以及门结构和信号传递过程)
参考链接
https://blog.csdn.net/u013348164/article/details/53730056
https://blog.csdn.net/A_snail/article/details/1491790
https://blog.csdn.net/weixin_42205987/article/details/82972767
https://blog.csdn.net/weixin_46539107/article/details/108847694
https://blog.csdn.net/jacke121/article/details/82756797
https://blog.csdn.net/zhangliaobet/article/details/99699675
https://blog.csdn.net/weixin_42077852/article/details/89061825
如果觉得有用,就请分享到朋友圈吧!
△点击卡片关注极市平台,获取最新CV干货
公众号后台回复“84”获取第84期直播PPT~
极市干货
YOLO教程:一文读懂YOLO V5 与 YOLO V4|大盘点|YOLO 系目标检测算法总览|全面解析YOLO V4网络结构
实操教程:PyTorch vs LibTorch:网络推理速度谁更快?|只用两行代码,我让Transformer推理加速了50倍|PyTorch AutoGrad C++层实现
算法技巧(trick):深度学习训练tricks总结(有实验支撑)|深度强化学习调参Tricks合集|长尾识别中的Tricks汇总(AAAI2021)
最新CV竞赛:2021 高通人工智能应用创新大赛|CVPR 2021 | Short-video Face Parsing Challenge|3D人体目标检测与行为分析竞赛开赛,奖池7万+,数据集达16671张!

# CV技术社群邀请函 #
△长按添加极市小助手
添加极市小助手微信(ID : cvmart2)
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
觉得有用麻烦给个在看啦~