
《自然·科学报告》:最小智能体模型,激发下一代AI
新智元报道
来源:nature
编辑:大明
【新智元导读】德国马普研究所新研究登上Scientific Report,通过构建最小化的智能体模型,对生物体适应环境的集体行为的产生和变化进行了模拟,有望给相关的AI系统,如自主微型机器人等模仿生物体的集体行为的系统设计和研究提供重要参考价值。
生物有机体会处理信息,目的是为了实现交互并适应周围环境,以寻找食物、交配、避害等。这些有机体的环境结构可以诱导对环境线索和刺激的适应性反应,并产生深远影响。具备专业优化策略的适应性集体行为在自然界中无处不在。 我们开发了一种最小的智能体模型,可以通过抽样轨迹探索环境。对采样轨迹中的空间信息进行存储,是我们对认知的最小化定义。我们发现,随着认知智能体构建和更新其环境因果结构的内部认知表示,系统中出现了复杂的模式,其中模式形成的开始与认知映射的空间重叠有关。智能体之间的信息交换会导致有序-无序之间的转换。在这个动态过程中,可以产生一种Goldstone模式,凸显出认知生物之间信息传递的“集体”共同机制。这些发现可能普遍适用于分散式AI群系统的设计。
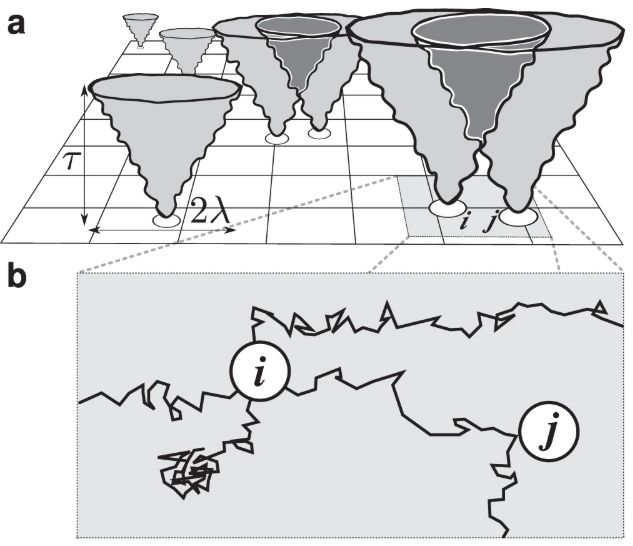 上图所示为在二维空间上移动的几个智能体的示意图,垂直维度代表时间。这些智能体彼此之间进行相互作用的同时,也在和环境进行相互作用。每个智能体都会探索可用的配置空间,并获取有关其结构的信息,并在这个过程中构建认知映射,响应周围环境来优化自身行为。
上图所示为在二维空间上移动的几个智能体的示意图,垂直维度代表时间。这些智能体彼此之间进行相互作用的同时,也在和环境进行相互作用。每个智能体都会探索可用的配置空间,并获取有关其结构的信息,并在这个过程中构建认知映射,响应周围环境来优化自身行为。简单智能体的集体行为可以表现出令人惊叹的组织化程度,比如盘状圆盘菌的细胞群、白蚁群构建复杂的结构,或成功防御掠食者的椋鸟或鱼群,都会表现出这种高度组织化特征。虽然单个智能体对周围的环境刺激做出的反应是局部的、单独的行为,而且大多数情况下是无意识的,但多智能体的行为结果往往表现为精心设计一样。这种现象自然地引发了一个问题,即在个体认知能力相当有限的个体社会中,这种“智能化”集体行为的特征是什么? 因此,从基本的角度研究个体行为者的认知能力对其集体行为的影响是非常有意义的。这需要定义认知概念,这些概念同时具有足够的一般性,以类似于集体现象中遇到的广泛的代理,但同时又足够简单,无法用于统计物理方法。 认知代理必须能够预测未来事件。比如一只试图逃避狮子追捕的羚羊,可以根据自己对周围环境的了解,选择一条通向具有多种逃生可能性的开放空间的道路,而非通往死胡同的道路。 再比如一个国际象棋选手,其活动发生在棋盘上的动作的抽象空间中。选手的内部认知映射可以让她思考可能的走法及其后果。根据经验和技能,选手能够考虑她可能的下一步棋,对手会怎样反击、可能做出的其他应对等等。 在本研究中,我们将“认知能力”定义为智能体确定给定环境中可能的棋盘着法数量的能力,作为该量度的直接概括。这种能力取决于智能体的认知映射,我们可以假设,与国际象棋选手类似,智能体将寻求能够令未来行棋着法数量最大化的行动。 我们认为,最佳的信息处理动态能力应该反映出智能体对复杂压力和刺激作出反应的能力水平。这里仅其中的信息或熵最大化已发现凭经验且可能构成的基本机制的几个例子,以信息最大化作为人类认知特征的量度。比如考察最大熵准确模拟静息状态的人类大脑活动:与健康人相比,ADHD患者的信号熵比较低。
图1:认知智能体系统及其认知映射的示意图。(a)从配置空间中的初始条件开始,代理(空心圆)通过持续时间τ的假设采样轨迹创建其周围环境的认知图。(b)所示为从认知智能体i发出的四个采样轨迹。由于其中一个轨迹影响代理j,代理i被迫改变其轨迹,从而响应其对环境的认知表现。认知能力表现为一个智能体进入另一个智能体空间之后最大化剩余选项的趋势,并以尽量高效的方式避免重叠区域
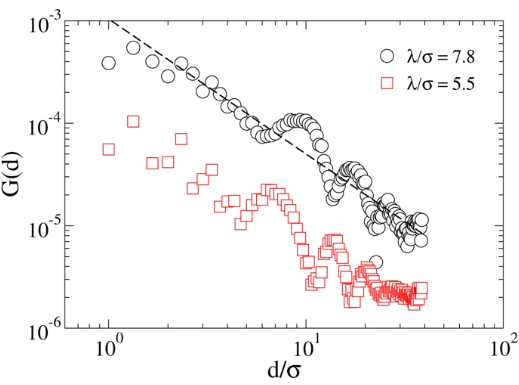
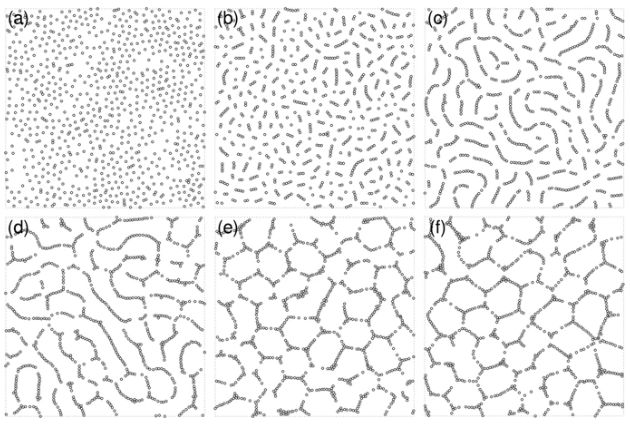 图2所示为随着映射大小λ的增加,系统的稳态配置情况
图2所示为随着映射大小λ的增加,系统的稳态配置情况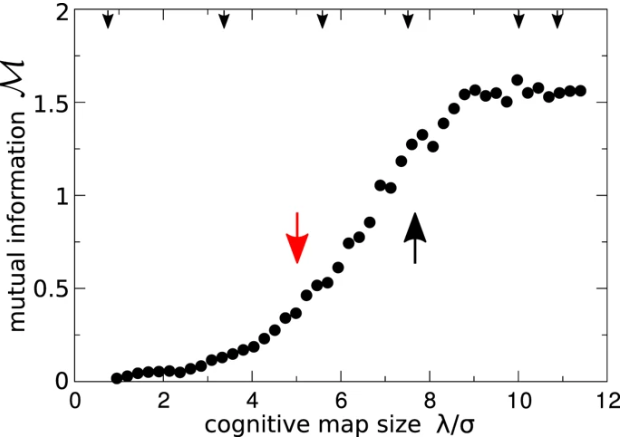 上图为互信息的依赖性中号关于认知图λ的大小。在非常小的λ处,智能体系统呈现出由于每个代理的几乎独立运动而几乎消失的相互信息
上图为互信息的依赖性中号关于认知图λ的大小。在非常小的λ处,智能体系统呈现出由于每个代理的几乎独立运动而几乎消失的相互信息 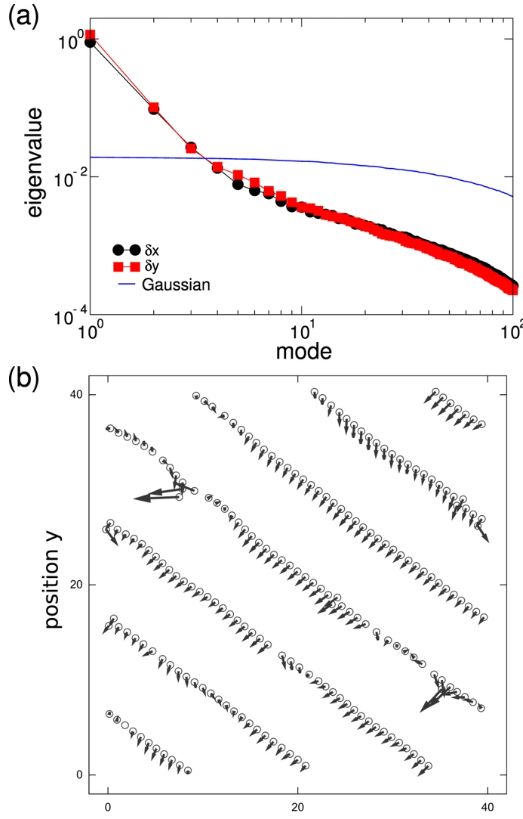
上图为关于δx和δy的C ij的特征值,以及与利用高斯分布位移的随机矩阵模型生成的不相关运动的比较。
总之,我们的研究为理解认知智能体系统中的非平衡转变迈出了第一步,这种系统可以动态地与环境实现相互作用,并通过最大化其认知映射的信息内容来反应认知能力的高低。我们的研究成果可以给相关的人工系统,如自主微型机器人等明确自主模仿生物体的集体行为的设计的研究提供重要的参考价值。
参考链接:
https://www.nature.com/articles/s41598-019-48638-8
评论