
使用PyTorch实现目标检测与跟踪
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
引言
在昨天的文章中,我们介绍了如何在PyTorch中使用您自己的图像来训练图像分类器,然后使用它来进行图像识别。本文将展示如何使用预训练的分类器检测图像中的多个对象,并在视频中跟踪它们。
图像中的目标检测
目标检测的算法有很多,YOLO跟SSD是现下最流行的算法。在本文中,我们将使用YOLOv3。在这里我们不会详细讨论YOLO,如果想对它有更多了解,可以参考下面的链接哦~(https://pjreddie.com/darknet/yolo/)
下面让我们开始吧,依然从导入模块开始:
from models import *from utils import *import os, sys, time, datetime, randomimport torchfrom torch.utils.data import DataLoaderfrom torchvision import datasets, transformsfrom torch.autograd import Variableimport matplotlib.pyplot as pltimport matplotlib.patches as patchesfrom PIL import Image
然后加载预训练的配置和权重,以及一些预定义的值,包括:图像的尺寸、置信度阈值和非最大抑制阈值。
config_path='config/yolov3.cfg'weights_path='config/yolov3.weights'class_path='config/coco.names'img_size=416conf_thres=0.8nms_thres=0.4# Load model and weightsmodel = Darknet(config_path, img_size=img_size)model.load_weights(weights_path)model.cuda()model.eval()classes = utils.load_classes(class_path)Tensor = torch.cuda.FloatTensor
下面的函数将返回对指定图像的检测结果。
def detect_image(img):# scale and pad imageratio = min(img_size/img.size[0], img_size/img.size[1])imw = round(img.size[0] * ratio)imh = round(img.size[1] * ratio)img_transforms=transforms.Compose([transforms.Resize((imh,imw)),max(int((imh-imw)/2),0),(128,128,128)),transforms.ToTensor(),])# convert image to Tensorimage_tensor = img_transforms(img).float()image_tensor = image_tensor.unsqueeze_(0)input_img = Variable(image_tensor.type(Tensor))# run inference on the model and get detectionswith torch.no_grad():detections = model(input_img)detections = utils.non_max_suppression(detections, 80,nms_thres)return detections[0]
最后,让我们通过加载一个图像,获取检测结果,然后用检测到的对象周围的包围框来显示它。并为不同的类使用不同的颜色来区分。
# load image and get detectionsimg_path = "images/blueangels.jpg"prev_time = time.time()img = Image.open(img_path)detections = detect_image(img)inference_time = datetime.timedelta(seconds=time.time() - prev_time)print ('Inference Time: %s' % (inference_time))# Get bounding-box colorscmap = plt.get_cmap('tab20b')colors = [cmap(i) for i in np.linspace(0, 1, 20)]img = np.array(img)plt.figure()ax = plt.subplots(1, figsize=(12,9))ax.imshow(img)pad_x = max(img.shape[0] - img.shape[1], 0) * (img_size / max(img.shape))pad_y = max(img.shape[1] - img.shape[0], 0) * (img_size / max(img.shape))unpad_h = img_size - pad_yunpad_w = img_size - pad_xif detections is not None:unique_labels = detections[:, -1].cpu().unique()n_cls_preds = len(unique_labels)bbox_colors = random.sample(colors, n_cls_preds)# browse detections and draw bounding boxesfor x1, y1, x2, y2, conf, cls_conf, cls_pred in detections:box_h = ((y2 - y1) / unpad_h) * img.shape[0]box_w = ((x2 - x1) / unpad_w) * img.shape[1]y1 = ((y1 - pad_y // 2) / unpad_h) * img.shape[0]x1 = ((x1 - pad_x // 2) / unpad_w) * img.shape[1]color = bbox_colors[int(np.where(unique_labels == int(cls_pred))[0])]bbox = patches.Rectangle((x1, y1), box_w, box_h,linewidth=2, edgecolor=color, facecolor='none')ax.add_patch(bbox)y1, s=classes[int(cls_pred)],color='white', verticalalignment='top',bbox={'color': color, 'pad': 0})plt.axis('off')# save image"-det.jpg"),bbox_inches='tight', pad_inches=0.0)plt.show()
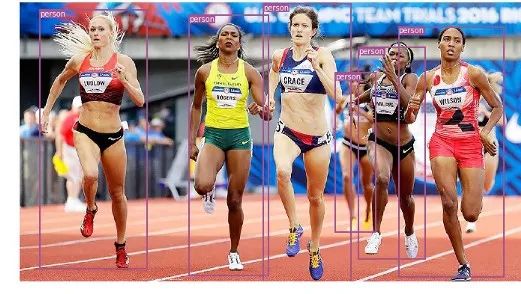
下面是我们的一些检测结果:


视频中的目标跟踪
现在你知道了如何在图像中检测不同的物体。当你在一个视频中一帧一帧地看时,你会看到那些跟踪框在移动。但是如果这些视频帧中有多个对象,你如何知道一个帧中的对象是否与前一个帧中的对象相同?这被称为目标跟踪,它使用多次检测来识别一个特定的对象。
有多种算法可以做到这一点,在本文中决定使用SORT(Simple Online and Realtime Tracking),它使用Kalman滤波器预测先前识别的目标的轨迹,并将其与新的检测结果进行匹配,非常方便且速度很快。
现在开始编写代码,前3个代码段将与单幅图像检测中的代码段相同,因为它们处理的是在单帧上获得 YOLO 检测。差异在最后一部分出现,对于每个检测,我们调用 Sort 对象的 Update 函数,以获得对图像中对象的引用。因此,与前面示例中的常规检测(包括边界框的坐标和类预测)不同,我们将获得跟踪的对象,除了上面的参数,还包括一个对象 ID。并且需要使用OpenCV来读取视频并显示视频帧。
videopath = 'video/intersection.mp4'inlineimport cv2from IPython.display import clear_outputcmap = plt.get_cmap('tab20b')colors = [cmap(i)[:3] for i in np.linspace(0, 1, 20)]# initialize Sort object and video capturefrom sort import *vid = cv2.VideoCapture(videopath)mot_tracker = Sort()#while(True):for ii in range(40):frame = vid.read()frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)pilimg = Image.fromarray(frame)detections = detect_image(pilimg)img = np.array(pilimg)pad_x = max(img.shape[0] - img.shape[1], 0) */ max(img.shape))pad_y = max(img.shape[1] - img.shape[0], 0) */ max(img.shape))unpad_h = img_size - pad_yunpad_w = img_size - pad_xif detections is not None:tracked_objects = mot_tracker.update(detections.cpu())unique_labels = detections[:, -1].cpu().unique()n_cls_preds = len(unique_labels)for x1, y1, x2, y2, obj_id, cls_pred in tracked_objects:box_h = int(((y2 - y1) / unpad_h) * img.shape[0])box_w = int(((x2 - x1) / unpad_w) * img.shape[1])y1 = int(((y1 - pad_y // 2) / unpad_h) * img.shape[0])x1 = int(((x1 - pad_x // 2) / unpad_w) * img.shape[1])color = colors[int(obj_id) % len(colors)]color = [i * 255 for i in color]cls = classes[int(cls_pred)](x1, y1), (x1+box_w, y1+box_h),4)(x1, y1-35), (x1+len(cls)*19+60,color, -1)cls + "-" + str(int(obj_id)),y1 - 10), cv2.FONT_HERSHEY_SIMPLEX,(255,255,255), 3)fig=figure(figsize=(12, 8))Stream")imshow(frame)show()=True)
下面让我们来看一下处理的结果: