
(附代码)视觉激光雷达信息融合与联合标定
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
编者荐语
使用视觉进行目标检测,将检测结果2D bounding box坐标信息投影到点云里面获得3D bounding boxx坐标,这里面需要将摄像头和激光雷达进行联合标定,即获取二者坐标系的空间转换关系。
作者 | Coulson@知乎
链接 | https://zhuanlan.zhihu.com/p/55825255
一、引言
最近在为车辆添加障碍物检测模块,障碍物检测可以使用激光雷达进行物体聚类,但是我们使用的是16线的velodyne,线数还是有些稀疏,对于较远的物体过于稀疏的线数聚类效果并不好,因此考虑使用视觉进行目标检测,然后投影到3D点云里面,获取障碍物位置,同时视觉还可以给出障碍物类别信息。
使用视觉进行目标检测,将检测结果2D bounding box坐标信息投影到点云里面获得3D bounding boxx坐标,这里面需要将摄像头和激光雷达进行联合标定,即获取二者坐标系的空间转换关系。
相关代码已经同步到我的github-smartcar
链接:https://github.com/sunmiaozju/smartcar
标定部分在detection/calibration文件夹, 信息融合部分在detection/camera_point_fusion
二、联合标定转换关系
联合标定的作用就是建立点云的point和图像pixel之间的对应关系,
需要获取相机与激光雷达外参,将点云3维坐标系下的点投影到相机3维坐标系下。
还需要通过相机标定获得相机内参,这个是把相机3维坐标系下的点投影到成像平面。具体如下所示:
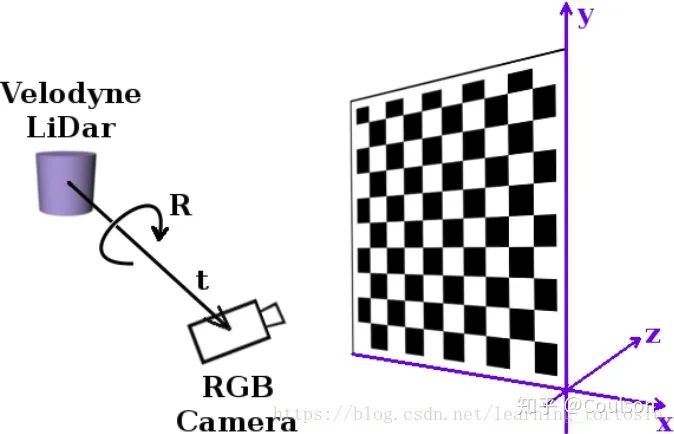
上图显示的就是联合标定得到的4×4转换矩阵的作用,将我们的3D点云转换到相机坐标系下面
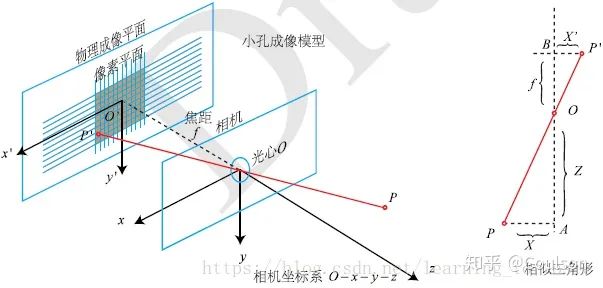
这幅图显示了相机坐标系和成像坐标系的关系,相机标定会得到相机内参矩阵和畸变系数,畸变系数可以消除相机凸透镜的畸变效应,相机内参的信息就可以想相机坐标下的3维点投影到2维的像素平面。相机标定的具体原理可以参考:https://zhuanlan.zhihu.com/p/24651968
三、相机标定
需要一个标定板,要硬质板或者泡沫的标定板,因为标定板的平面要保证是平的。标定板的文件可以到opencv官网下载。
首先做相机标定,相机标定模块在detection/calibration/camera_calibration
编译
cd your_rosworkspace_path/
catkin_make -DCATKIN_BLACKLIST_PACKAGES=ndt_mapping;static_map;ndt_localization
这里我们先不编译ndt_mapping;static_map;ndt_localization这三个软件包
如果出错,可以先编译消息文件,再编译全部文件:
catkin_make -DCATKIN_WHITELIST_PACKAGES=smartcar_msgs;yunle_msgs;smartcar_config_msgs
catkin_make -DCATKIN_WHITELIST_PACKAGES=“”
然后要修改detection/calibration/camera_calibration/nodes文件夹下面python文件的可执行权限:
sudo chmod a+x your_path/detection/calibration/camera_calibration/.
启动摄像头驱动节点
roslaunch cv_camera cv_camera_driver.launch
这里注意你自己的摄像头video_id,使用如下命令查看
ls /dev/video*
然后根据需要修改your_path/driver/cv_camera/launch/cv_camera_driver.launch里面的
<param name="device_id" type="int" value="1" />
新开一个终端,执行
rosrun calibration cameracalibrator.py --square 0.13 --size 8x6 image:=/cv_camera/image_raw
然后就可以进行标定了,弹出的界面如下所示:
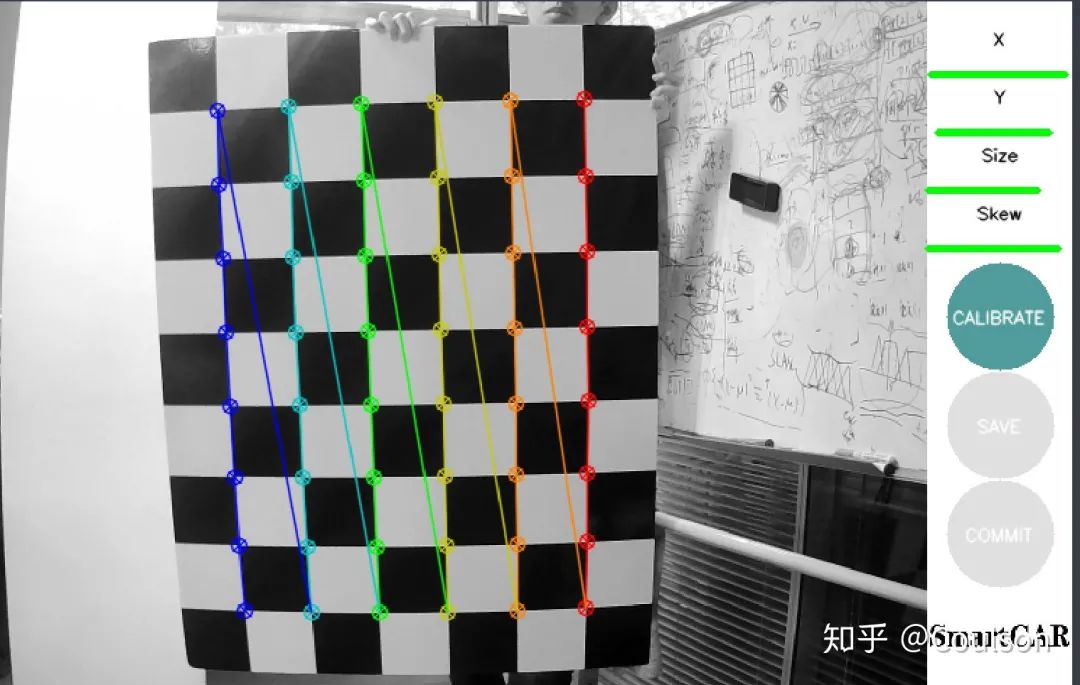
需要做的就是移动标定版,让右上角的四个条都变绿(我这里绿的是已经调好了,未调整是偏黄色)
x代表左右移动,y代表上下移动,size代表远近移动,skew代表倾斜侧角,可以上下倾,也可以左右倾。
只有四个尺度的信息都满足要求之后,右侧的calibration图标才会显示出来,这时候代表可以计算标定结果了,点击calibration,然后save,标定结果会保存在home文件夹下面。
四、联合标定
联合标定使用的是autoware的CalibrationTookit模块,代码在detection/calibration/calibration_camera_lidar文件夹下面
编译好代码之后,首先要启动摄像头和激光雷达的驱动节点
roslaunch cv_camera cv_camera_driver.launch
新终端
roslaunch velodyne_pointcloud VLP16_points.launch
然后驱动联合标定节点
roslaunch calibration_camera_lidar camera_lidar_calib.launch
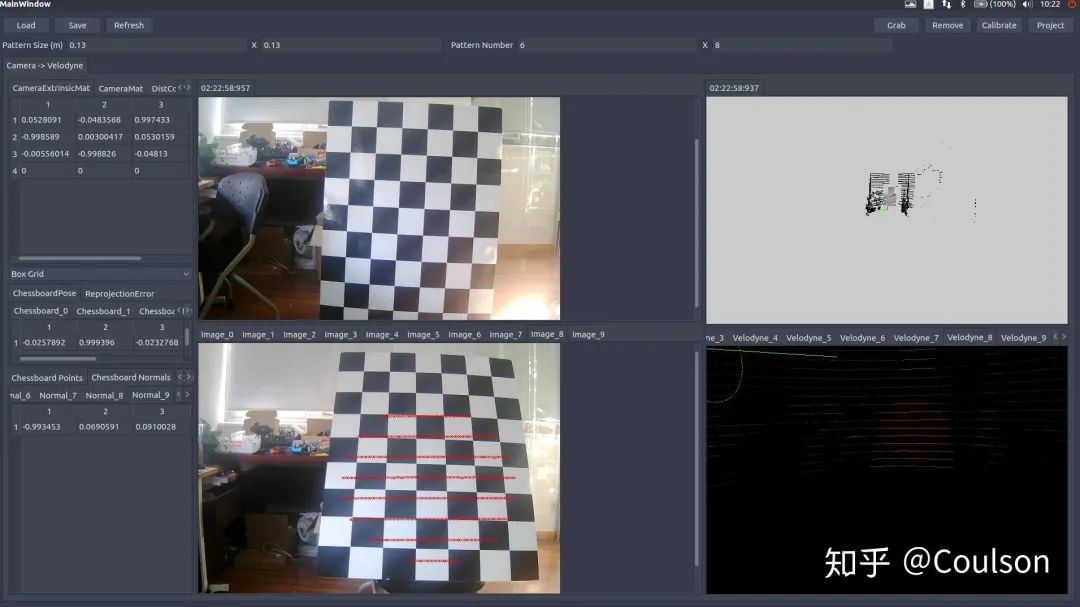
启动之后可以看到UI界面,具体操作指南,可以参考文档:detection/calibration/calibration_camera_lidar/CalibrationToolkit_Manual.pdf 的2.3节
也可以参考链接:https://blog.csdn.net/AdamShan/article/details/81670732#commentBox
如何使用这个模块上面的链接已经说的很明白,这里简单说一下:
·首先左上角load之前标定的相机内参文件,导入相机内参
·调整点云的视角(操作方法参考上面链接),然后确保图像和点云都可以看到完整的白标定板,点击右上角的grab捕获单帧图片和点云
·在捕获单帧的点云上面,选取图片中对应标定板的位置,选取的是圆圈内的所有点,所包含的信息不仅仅只有点,还有平面法相量,标定的时候一定要确保法相量与平面是垂直的,因为开始我没有注意这个,结果后面验证的时候投影点在图片上显示不出,根本没有投影在图像范围内。
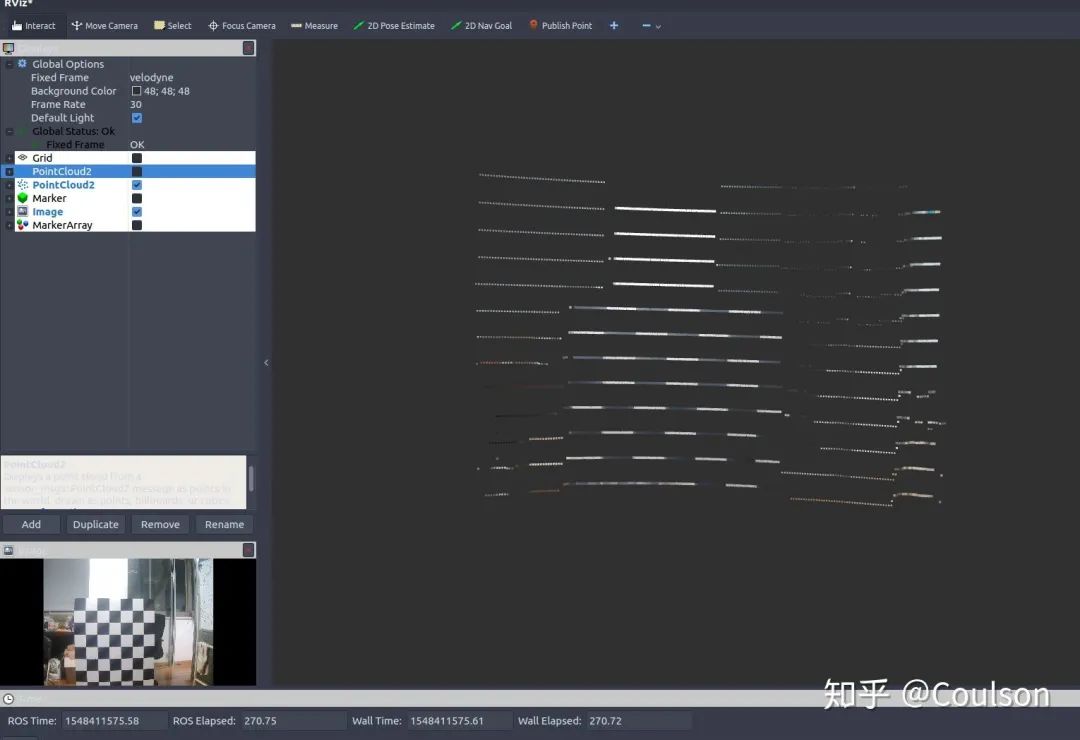
标定好之后,在右上角有一个project,可以查看标定的效果,一般来将,可以看到如下效果:
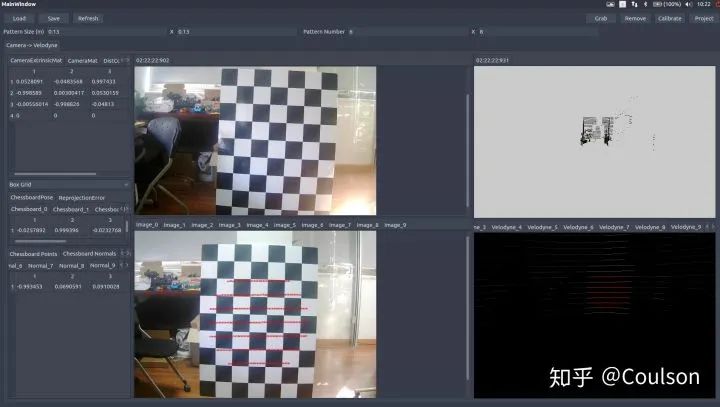
左下角图片上的红线就是右下角点云红线投影到图片上的位置,下面这幅图片换一个角度,点同样投影上去,而且相对位置在点云和图片里面基本一致:
这样的效果基本就是可以了,点击save,会将输出的外参文件保存在home文件夹下面。
五、视觉与点云信息融合
有了联合标定的外参文件,我们就可以进行信息融合了。
信息融合主要有两个模块:点云到图像 、 图像到点云
5.1 image2points
这部分代码在your_path/deteection/camera_point_fusion/packages/joint_pixel_pointcloud这个pkg下面
这部分代码实现的功能是建立将velodyne-16的点云投影到640×480的图像上面,如果点云投影的二维点在图像640×480范围内,那么就把这个三维激光雷达点的位置记下来,同时匹配图像上对应像素的颜色,变成pcl::XYZRGB点返回,并显示出来。
除此之外,这个模块还可以订阅目标检测信息,摄像头获取图像,经过目标检测模块之后,得到2维bounding box坐标,利用点云和图像像素的对应关系,得到3维bounding box信息,并在RVIZ中显示出来。
编译好代码之后,运行:
roslaunch joint_pixel_pointcloud joint_pixel_pointcloud.launch
同样,需要先运行摄像头驱动节点和velodyne驱动节点,还有目标检测节点,不过目标检测模块因为某些原因不能公开到github,你可以使用自己的目标检测模块,作为ROS节点添加到工作空间即可。
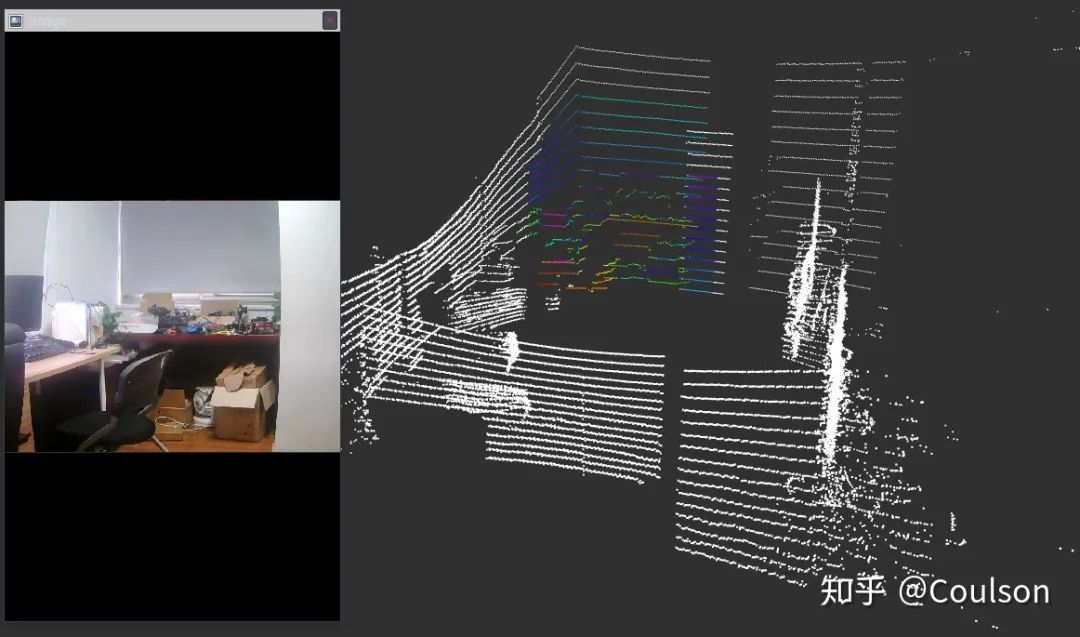
代码运行效果如下所示:
这个就是图像像素所对应的点云,可以看到点云已经被加上了黑白的颜色,点云周边有一些比较淡的颜色,下面这幅图加深了颜色,同时显示出图像对应的点云在整个点云帧的位置:
下面是目标检测的效果:
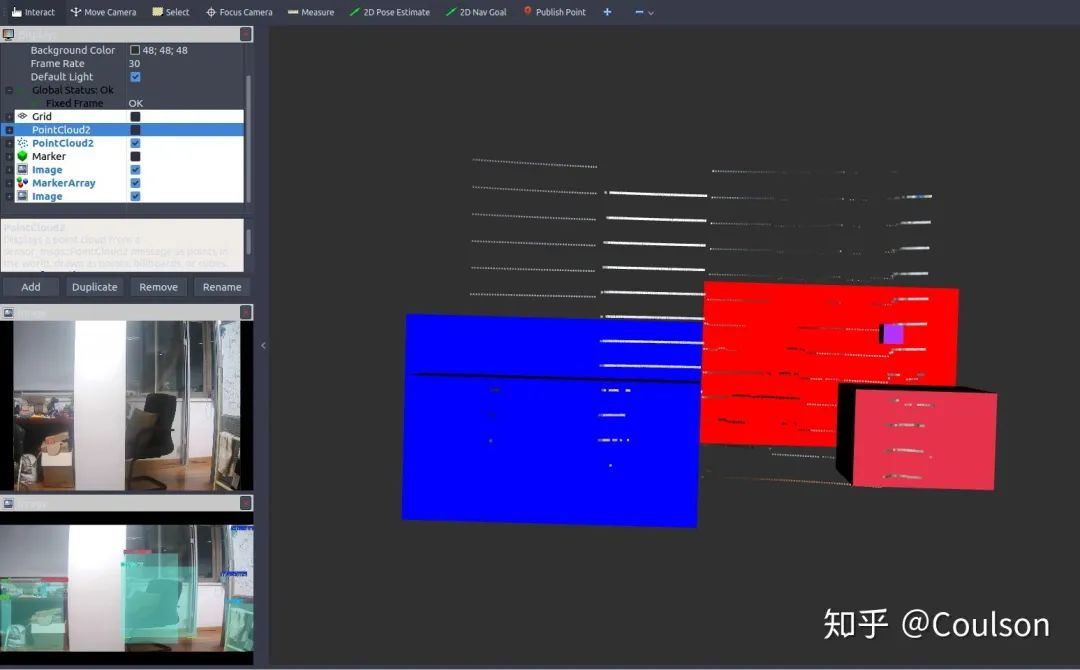
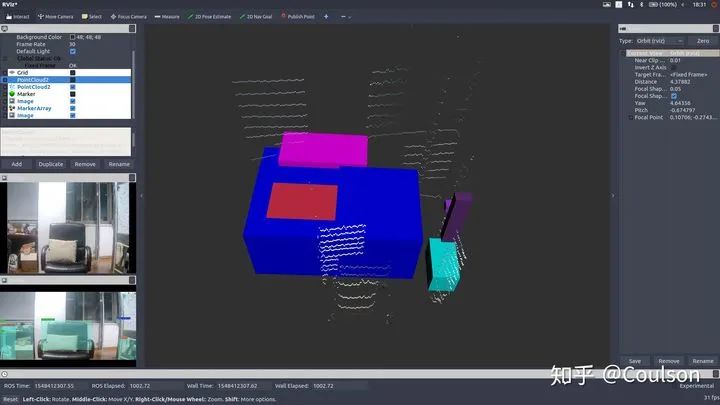
可以看到,图像上检测出来的物体,基本都在3D场景下对应出来了,其中,不同的颜色代表不同的物体类别。
不过,因为这个目标检测模型是针对于自动驾驶场景的,分类对象都是car,pedestrian,info signs等,而因为实验条件的原因我还没有来得及拿出去测试代码效果,就先在房间测试了一下,所以可以看到目标检测的框是有些没意义的东西,不过不影响验证信息融合效果。
这个节点可以便于我们进行障碍物检测,因为视觉信息进行障碍物检测是要优于低线数激光雷达聚类的,但是视觉信息识别物体虽然准,却没有距离信息,激光雷达可以提供距离信息,因此,视觉和激光雷达二者结合,就可以获得障碍物的距离、类别以及位置了
5.2 points2image
这个是把点云投影到图像上,具体运行基本同理我就不说了。
代码的具体效果如下所示:

可以看到,点云基本是和图像是匹配的。
这个节点的作用是可以帮助我们进行红绿灯识别或者其他info_sign识别。因为进行红绿灯检测最好是可以获取红绿灯在图像上的位置,即ROI,然后再进行识别会容易很多。我们可以在事先建立好的场景语义地图中,加入红绿灯的位置,这样车辆到达该位置的时候就可以立刻找到红绿灯在图像上的ROI,这样会优化info sign的检测。具体如下所示:

六、总结
本文主要介绍了关于视觉和激光雷达进行信息融合相关内容,包括相机标定,摄像头与激光雷达联合标定,信息融合节点等等
利用激光雷达和视觉信息融合,我们可以结合二者的优点优化障碍物检测或交通标志的识别,以及优化其他相关任务等等。
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
—THE END—
评论