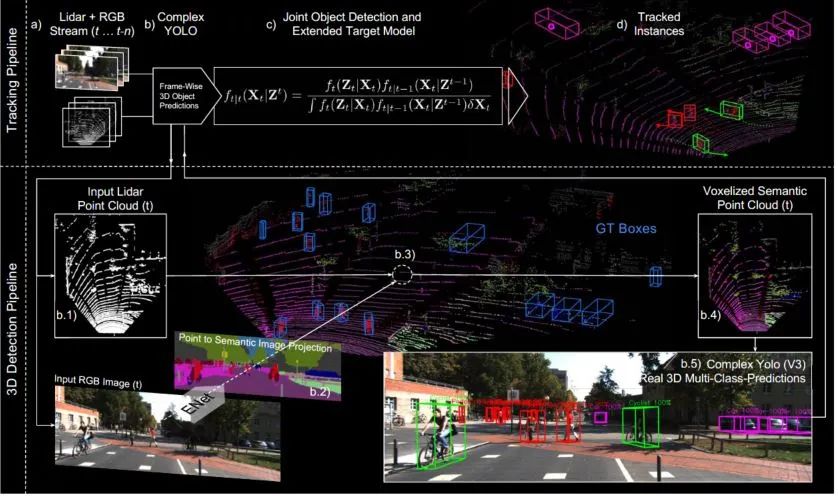
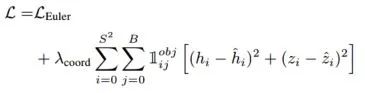
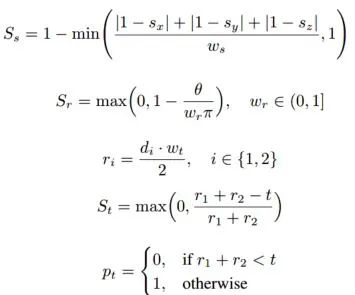
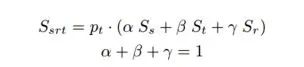
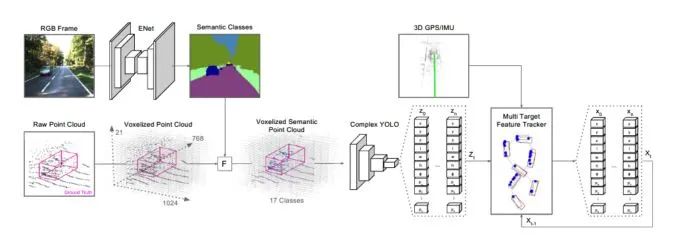
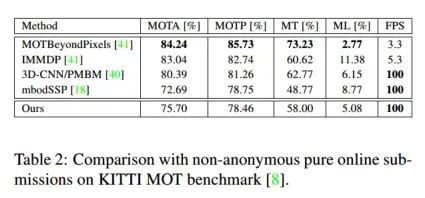
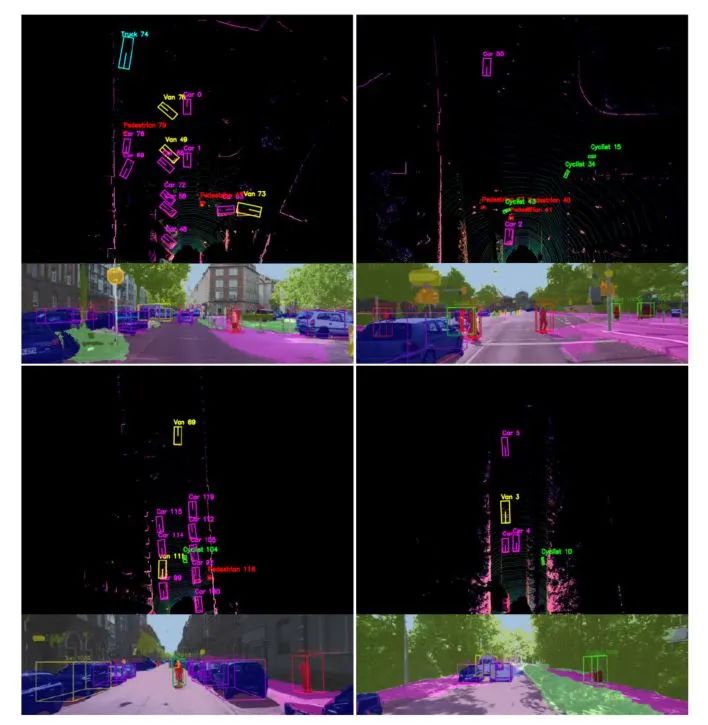
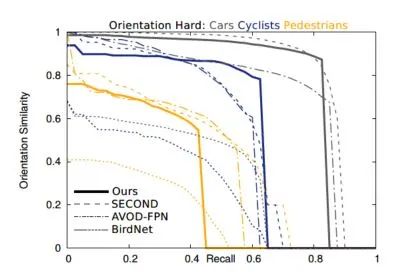
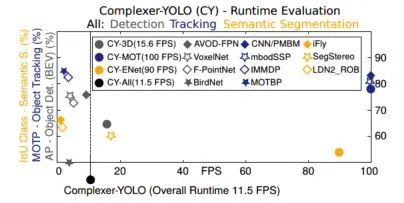
Complexer-YOLO: Real-Time 3D Object Detection and Tracking on Semantic Point Clouds Accurate detection of 3D objects is a fundamental problem in computer vision and has an enormous impact on autonomous cars, augmented/virtual reality and many applications in robotics. In this work we present a novel fusion of neural network based state-of-the-art 3D detector and visual semantic segmentation in the context of autonomous driving. Additionally, we introduce Scale-Rotation-Translation score (SRTs), a fast and highly parameterizable evaluation metric for comparison of object detections, which speeds up our inference time up to 20% and halves training time. On top, we apply state-of-the-art online multi target feature tracking on the object measurements to further increase accuracy and robustness utilizing temporal information. Our experiments on KITTI show that we achieve same results as state-of-the-art in all related categories, while maintaining the performance and accuracy trade-off and still run in real-time. Furthermore, our model is the first one that fuses visual semantic with 3D object detection.✄------------------------------------------------
双一流大学研究生团队创建,一个专注于目标检测与深度学习的组织,希望可以将分享变成一种习惯。
整理不易,点赞三连!



 下载APP
下载APP