
三维点云目标检测算法梳理及前沿进展
基于此,深蓝学院开设了『三维点云处理』课程,希望通过这门课,大家能对一些经典算法的理论有一些清晰的认识,自己能实现这些算法,而不是简单调用一个API而已。
1

自动驾驶研究科学家
博士期间,师从电子与计算机系Ben M. Chen教授及计算机系Lee Gim Hee教授,主要研究领域为计算机视觉、深度学习、机器人。在CVPR , ICCV , ICRA , IROS 的顶级会议上以第一作者发表论文多篇。在2017, 2015年国际微小型无人机大赛中分别获得冠军、亚军。
2
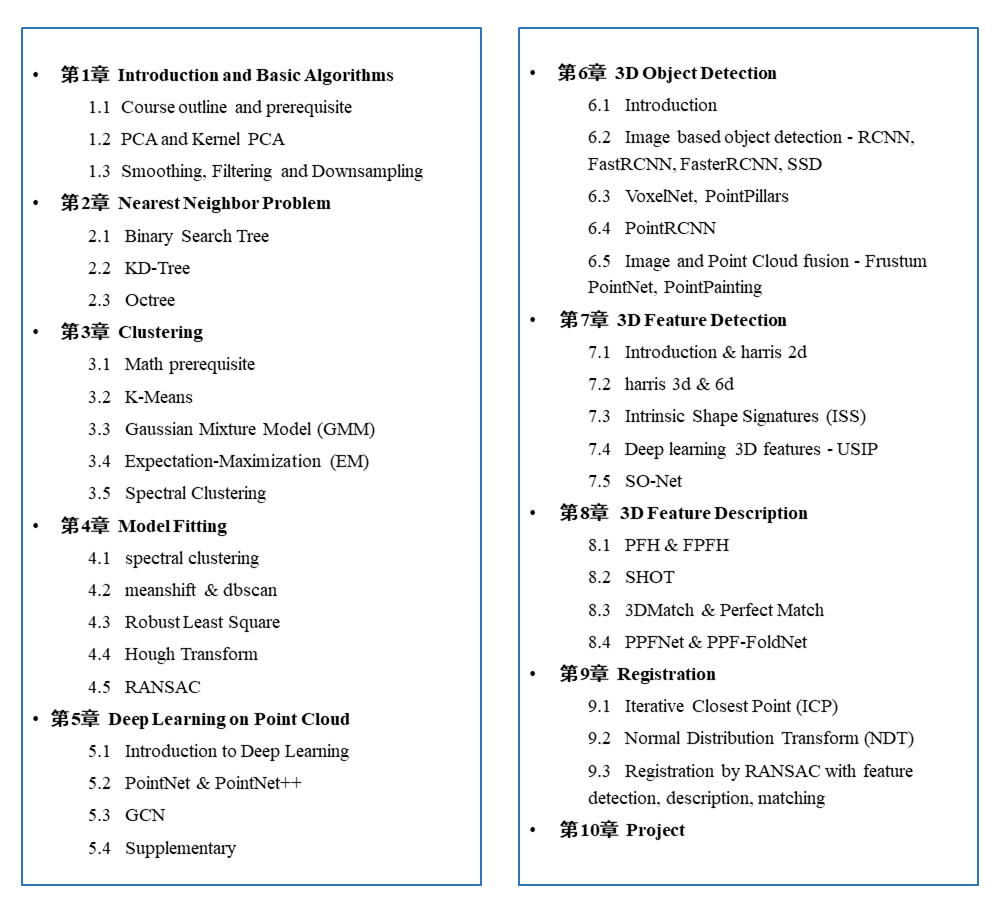 (本课程中文授课,点击图片查看大图)
(本课程中文授课,点击图片查看大图)
3


4
1. 对三维点云这一领域有全方位的认知,了解三维感知的各种问题及解决方案;
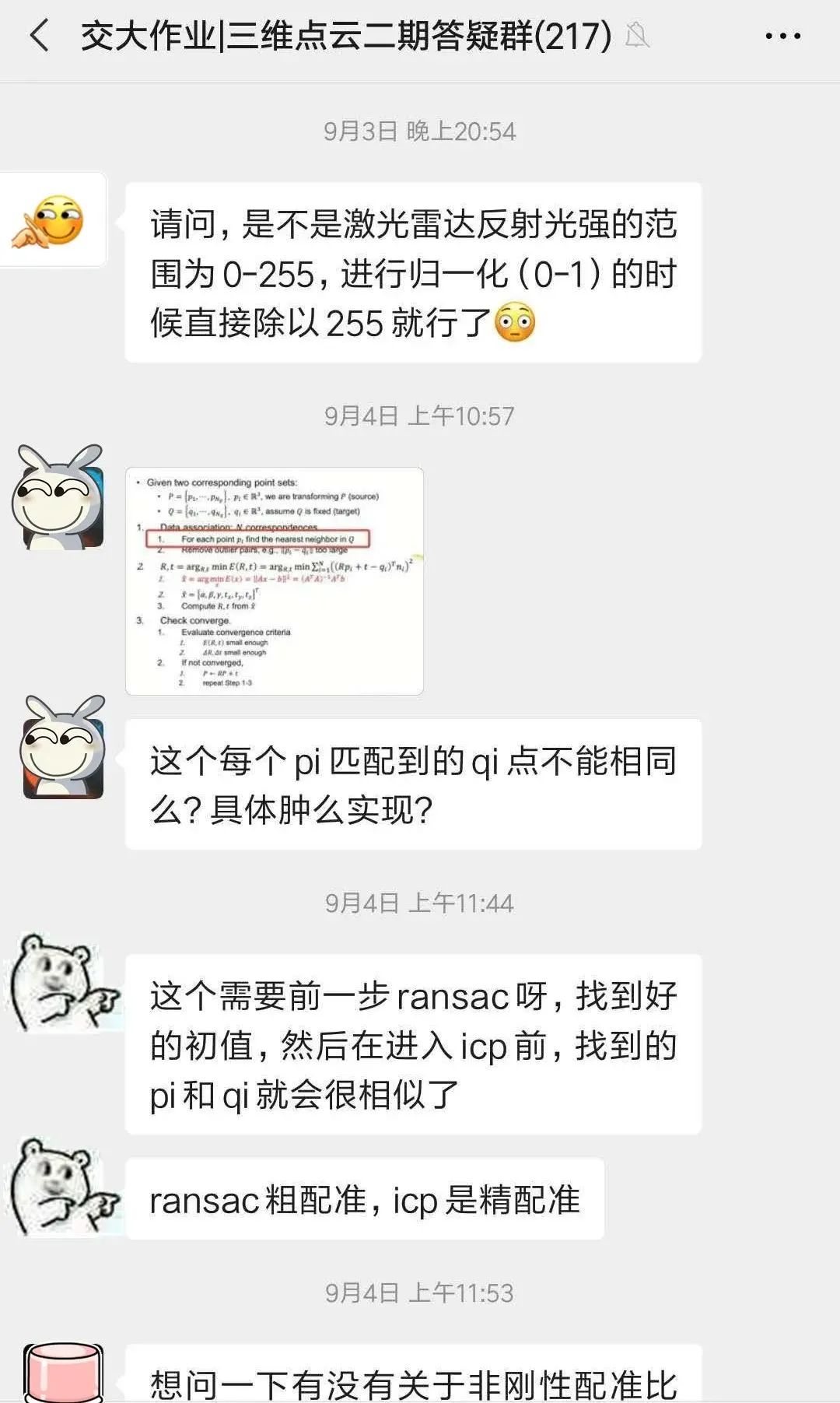
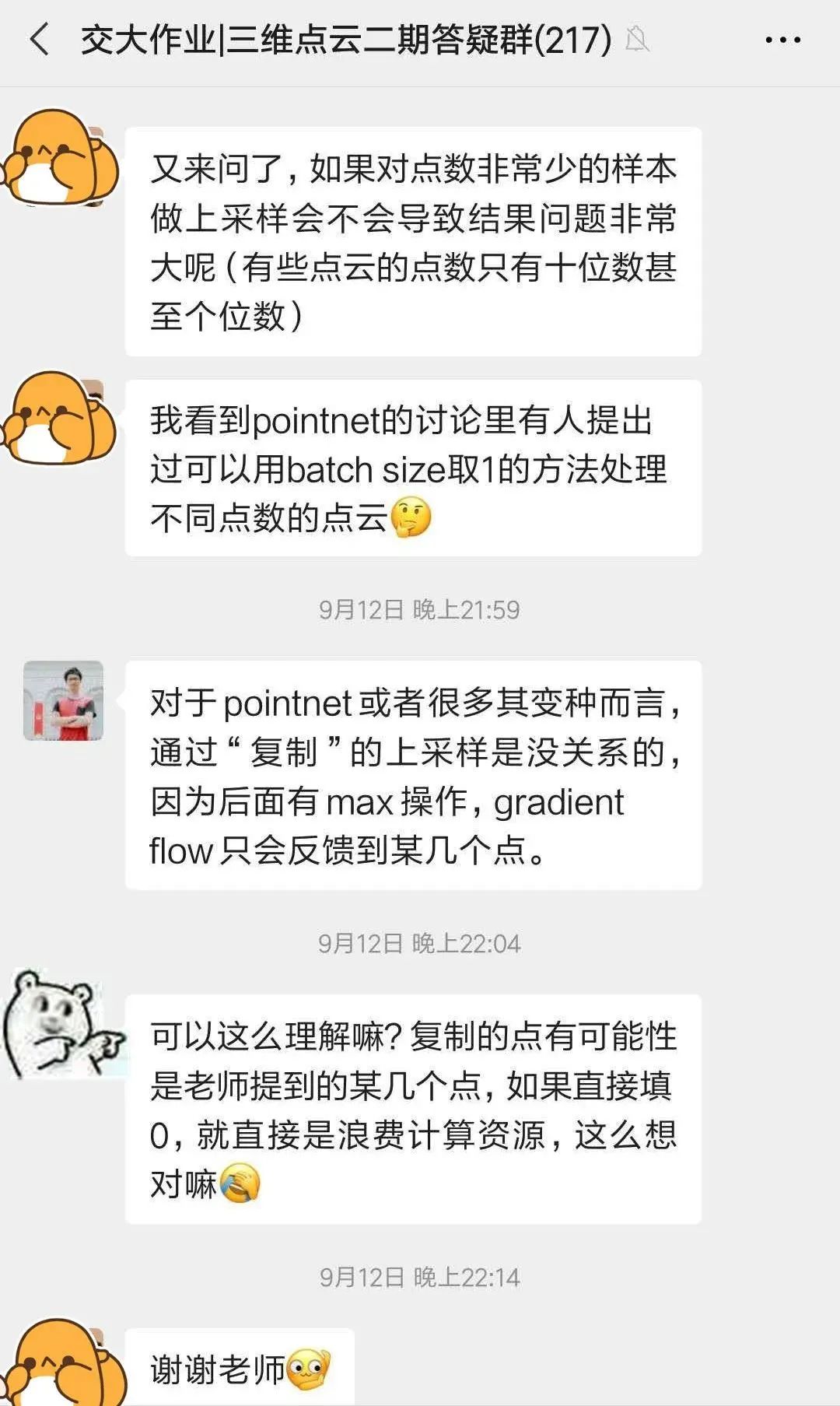
2. 深入理解各个经典点云算法,比如octree,ICP,PointNet等,并且在真实数据集上实现、应用这些算法;
3. 涉猎最前沿的感知(Perception)方向的深度学习算法,比如物体检测、点云配准、特征提取等,了解学术界的热点问题及发展趋势;
5

6
讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。




(左右滑动,查看更多)
评论