
9种自动驾驶传感器融合算法
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
本文来源:知乎-AI云原生
/ 导读 /
在自动驾驶汽车中,传感器融合是融合来自多个传感器数据的过程。该步骤在机器人技术中是强制性的,因为它提供了更高的可靠性、冗余性以及最终的安全性。
为了更好地理解,让我们考虑一个简单的例子,如激光雷达和摄像头都在看着行人 。
如果两个传感器中的一个没有检测到行人,我们将使用另一个传感器作为冗余来增加检测到行人的机会。
如果两个传感器都检测到了行人,传感器融合技术将使我们更准确地知道行人的位置……通过处理两个传感器的噪声值。

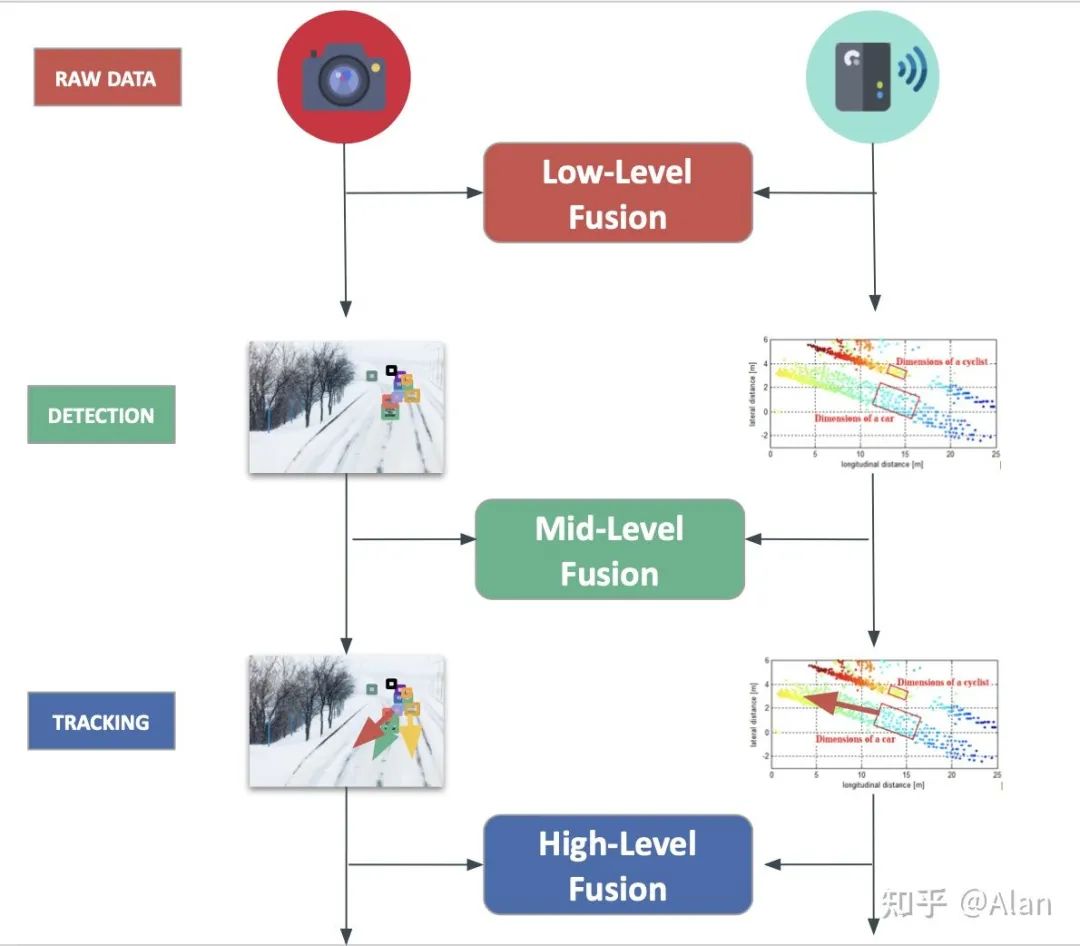
按抽象级别进行传感器融合
低级别融合:融合原始数据
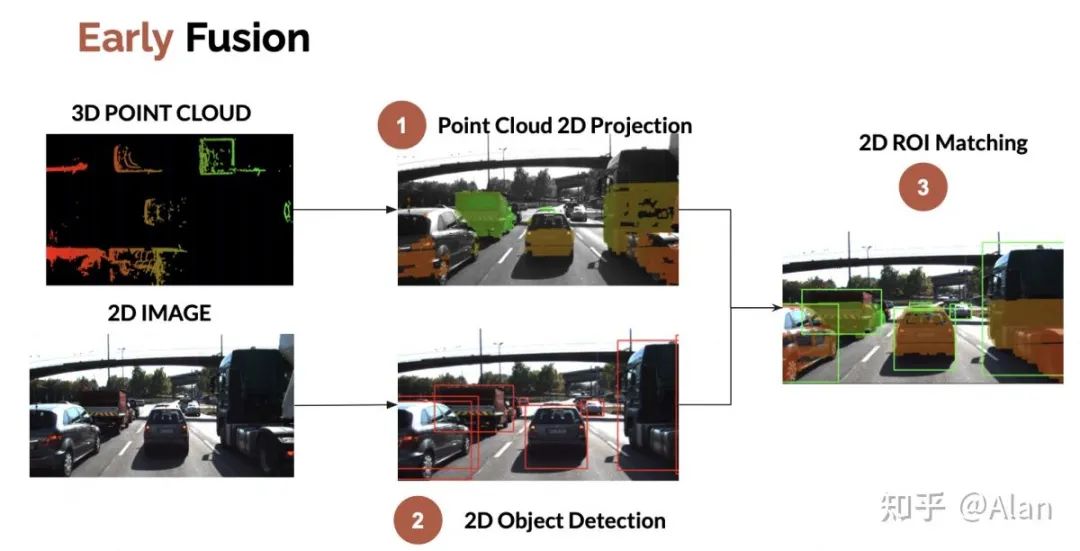
中级别融合:融合检测数据
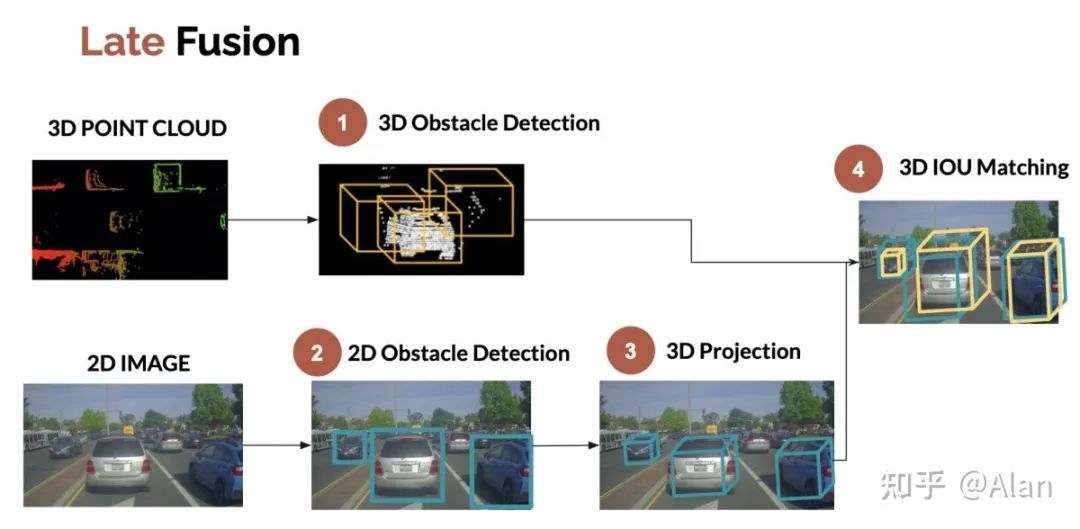
高级别融合:融合轨迹

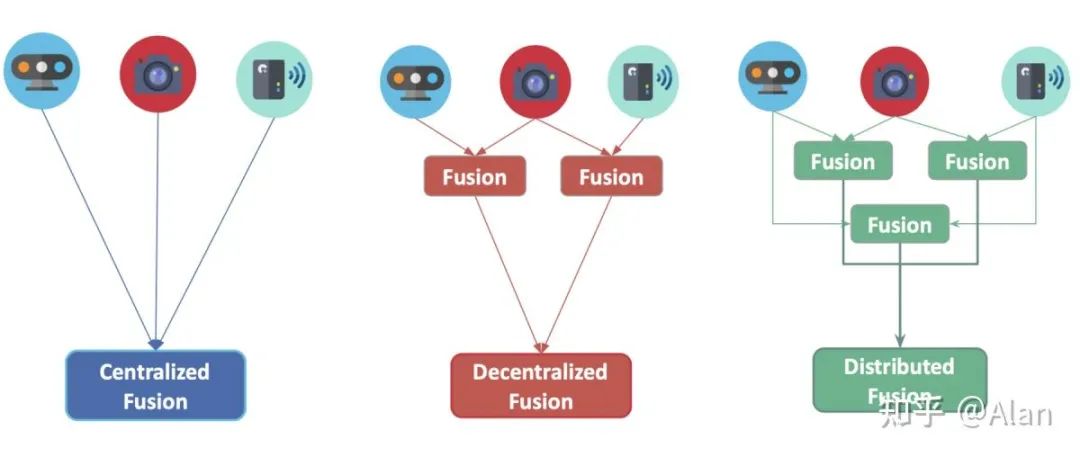
中心化级别的传感器融合
中心化:一个中央单元处理融合(低级别)。
去中心化:每个传感器融合数据并将其转发到下一个。
分布式:每个传感器在本地处理数据并将其发送到下一个单元(后期融合)。
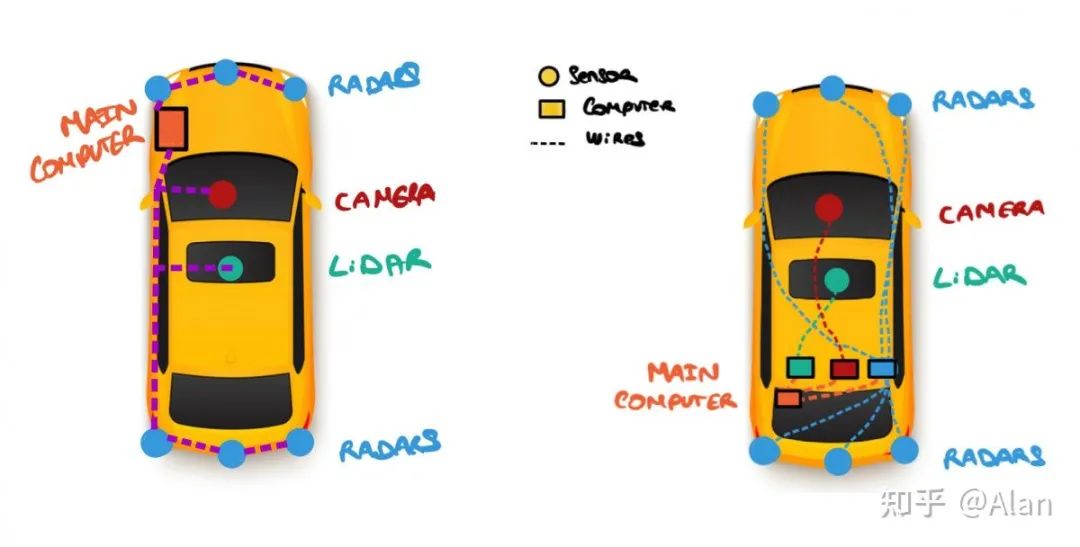
1. 传感器只是“卫星”:它们只是用来收集原始数据的。
2. 主计算机中进行360°的融合:不必安装非常好的传感器,因为不会进行单个检测。
3. 检测是在360°的全景图上完成的。

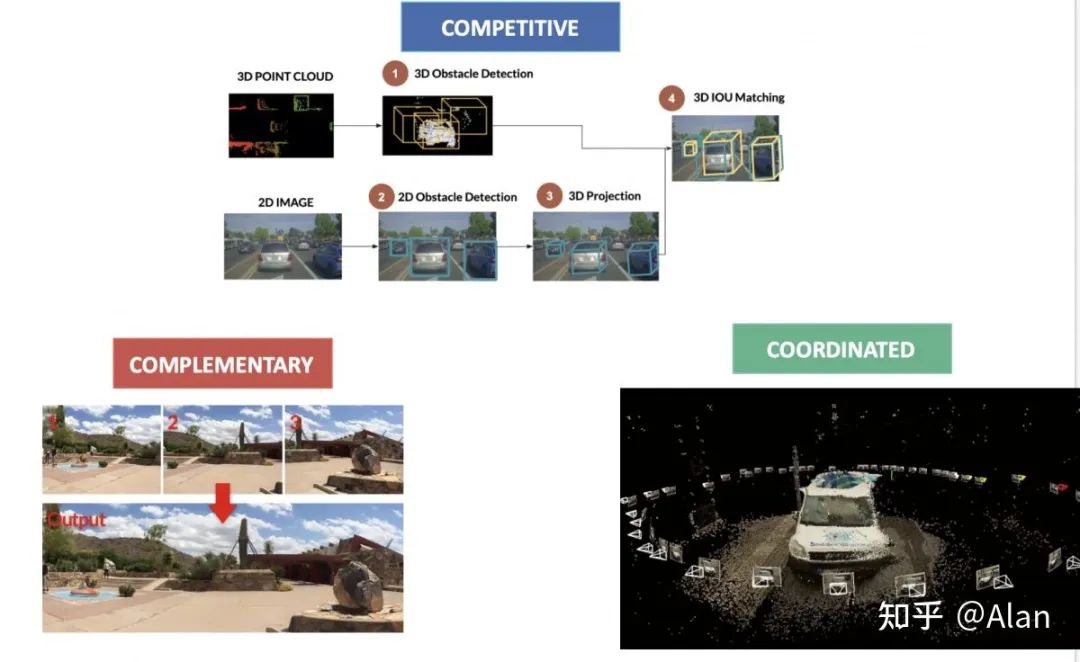
按竞争级别的传感器融合
在抽象级别,问题是“什么时候”融合应该发生。 在中心化级别,它是关于“在哪里”的。 在竞争级别,问题是“融合应该做什么?”
竞争融合
互补融合
协同融合
本文仅做学术分享,如有侵权,请联系删文。
评论